一种基于群智能的盾构隧道传感器布置方案优化方法、装置、电子设备及存储介质
- 国知局
- 2024-10-15 10:04:00
本发明涉及盾构隧道监测领域,尤其是涉及一种基于群智能的盾构隧道传感器布置方案优化方法、装置、电子设备及存储介质。
背景技术:
1、为实现盾构隧道的结构健康实时监测,需要在隧道断面布置健康监测传感器,现阶段光纤光栅传感器在盾构隧道中的布局方式大多是在待测断面上均匀布设,这导致传感器阵列因未布设在隧道结构形变最严重的区域而损失监测精度,而相关研究也少有提及传感器的布设方式对盾构隧道结构形态监测精确度的影响,对光纤布拉格光栅传感器(fiberbragg grating,fbg)的布局方式需进一步研究。如何在保证系统整体监测性能的同时,降低监测成本,迫切需要进行相关布局优化研究。
2、通过调研,传统布局优化算法多在历史监测经验上进行改进布局,对监测效果提升不够显著;多目标智能优化算法在解决特定问题时效果良好,但鲁棒性差、泛化能力弱。普通优化算法搜索方式简单,容易出现过早收敛、搜索停滞和陷入局部最优等情况,影响算法性能。难以兼顾搜索速度和精度,基于非支配排序的算法运算量大,而基于外部存档的算法所得解集多样性差;因此,改进多目标优化算法搜索机制,避免出现过早收敛、停滞和易陷入局部最优解,快速有效地搜索到最优解,改善解集的多样性,并将算法应用于fbg传感阵列布局优化问题,亟需进一步的研究。
技术实现思路
1、本发明的目的在于提供一种基于群智能的盾构隧道传感器布置方案优化方法、装置、电子设备及存储介质,极大节省了搜索时间,提高了搜索性能,准确率高,优化传感器布局方面具有良好的速度和收敛性。
2、为实现上述目的,本发明提供了一种基于群智能的盾构隧道传感器布置方案优化方法,包括
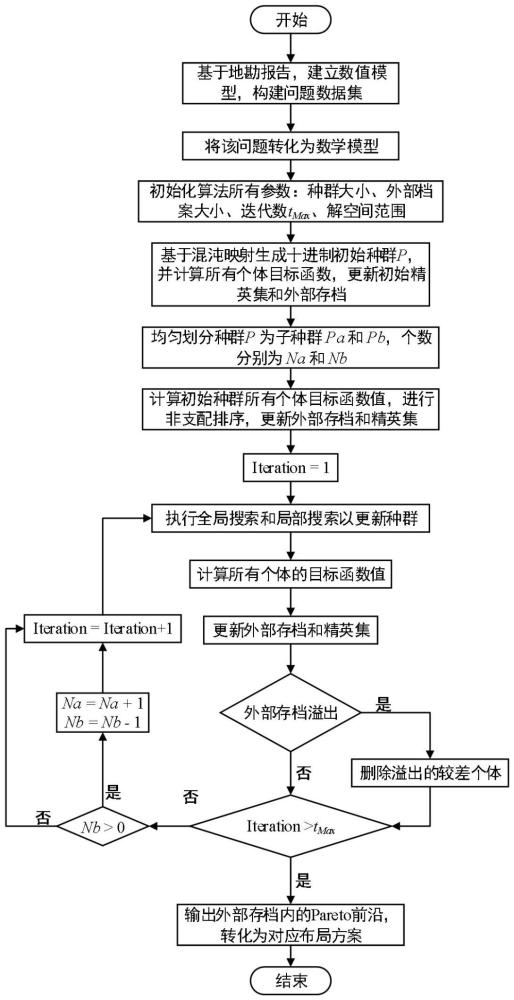
3、对需要监测的典型断面进行数值建模,并收集隧道断面的应变数据建立布局问题的数据集;将布局问题转化为数学模型,初始化算法所有参数;
4、基于混沌映射生成初始种群p,将初始种群p划分为两个子种群,分别为种群pa和种群pb,计算两个种群的目标函数值,然后进行非支配排序,更新初始的外部存档,利用拥挤度距离排序选出精英集;
5、迭代更新种群、计算所有个体目标函数值、更新外部存档和精英集;
6、达到迭代次数后,停止搜索,输出外部存档中存储的pareto前沿,并将解转化为对应的传感器布置方案,否则,继续迭代。
7、优选的,所述初始化算法所有参数,包括种群大小、外部档案大小、最大迭代数tmax、解空间范围。
8、优选的,基于混沌映射生成初始种群p,
9、
10、
11、式中,uk表示第k次产生的混沌值,uk+1表示第k+1次产生的混沌值,α表示混沌参数,u表示产生的混沌序列,ui是混沌序列u内的元素,第i个混沌值,np表示种群个数,ub表示解空间上界,lb表示解空间下界,p表示生成的初始种群的个体。
12、优选的,目标函数为基于径向基函数重构应变曲线的均方根误差值re(x)和布置成本c(x),如式(4)和(5)
13、
14、其中,yi为问题数据集中的真实应变值,y'i为基于当前传感器布局获取的数据并采用径向基函数重构得到的应变值,n0为重构应变的个数,n为传感器个数,x为选定的布局方案。
15、优选的,更新种群具体为
16、对种群pa进行全局搜索和种群pb进行局部搜索,更新方法为
17、
18、其中,t表示当前迭代次数,elite为当前第t迭代从精英集选出的精英个体,β1和β2都是0到1之间的随机数,bi(t)是通过布朗运动产生的值,zi(t)和zi(t+1)分别为当前代个体和更新后的个体,zbest(t)为当前精英集最优个体,zmean(t)为精英集的质心,其余各参数计算如公式(7)-(9),
19、m=df·t (7)
20、
21、优选的,采用公式(4)和(5)计算两个种群的目标函数值。
22、优选的,根据得到的两个种群的目标函数值,进行非支配排序,更新外部存档,若溢出则删除掉最差的个体;
23、计算存档内所有个体的拥挤度距离并进行排序,取出最优的三个个体和存档平均值更新组成新的精英集。
24、优选的,若迭代次数已达到设定的最大迭代次数,停止搜索;反之,在pb种群数大于零的前提下,pb种群转移1个个体到pa种群,pb无个体则不再转移,继续执行迭代。
25、一种基于群智能的盾构隧道传感器布置方案优化装置,包括
26、数据获取模块用于对需要监测的典型断面进行数值建模,并收集隧道断面的应变数据建立布局问题的数据集;
27、模型转化模块用于将布局问题转化为数学模型;
28、参数初始化模块用于初始化算法所有参数;
29、种群初始化模块用于基于混沌映射生成初始种群p,将初始种群p划分为两个种群,分别为种群pa和种群pb,计算两个种群的目标函数值,然后进行非支配排序,更新初始的外部存档,利用拥挤度距离排序选出精英集;
30、新种群形成模块用于迭代更新种群、计算所有个体目标函数值、更新外部存档和精英集;
31、方案输出模块用于达到迭代次数后,停止搜索,输出外部存档中存储的pareto前沿,并将解转化为对应的传感器布置方案,否则,继续迭代。
32、一种存储介质,所述存储介质中存储有计算机可执行指令,所述计算机可执行指令被处理器加载并执行时,实现一种基于群智能的盾构隧道传感器布置方案优化方法的步骤。
33、因此,本发明采用上述的一种基于群智能的盾构隧道传感器布置方案优化方法、装置、电子设备及存储介质,技术效果如下:
34、(1)本发明的算法(mosao)将二进制传感器布局转换成十进制编码的解,使离散问题连续化,极大节省了搜索时间。利用混沌映射生成均匀分布的初始种群,提高了搜索性能,mosao能够获得均匀分布的pareto边界,且每次运行所需的平均运行时间极短。
35、(2)引入径向基函数,可直接实现隧道应变的精确重构和对监测性能的直观体现。在此基础上,提出了测量监测性能的目标函数来搜索传感器的最优布局。与传统的经验布局相比,获得的布局效果良好。实验结果表明,各工况下重构的均方根误差均小于11.21,平均准确率在95.72%以上,最小准确率达到84.61%以上,最小拟合优度达到0.9961。即使在原型实验中,其平均准确率也在93.50%以上。
36、(3)引入了双种群机制和外部档案,随着种群的更新,进行了更多的探索而不是开发,避免了陷入局部最优的困境。与收敛性能相似的spea-ii(strength paretoevolutionary algorithm ii)算法相比,本专利算法节省了75%的运算时间,该算法在优化传感器布局方面具有良好的速度和收敛性。
技术特征:1.一种基于群智能的盾构隧道传感器布置方案优化方法,其特征在于,包括
2.根据权利要求1所述的一种基于群智能的盾构隧道传感器布置方案优化方法,其特征在于,所述初始化算法所有参数,包括种群大小、外部档案大小、最大迭代数tmax、解空间范围。
3.根据权利要求1所述的一种基于群智能的盾构隧道传感器布置方案优化方法,其特征在于,基于混沌映射生成初始种群p,
4.根据权利要求1所述的一种基于群智能的盾构隧道传感器布置方案优化方法,其特征在于,目标函数为基于径向基函数重构应变曲线的均方根误差值re(x)和布置成本c(x),如式(4)和(5)
5.根据权利要求1所述的一种基于群智能的盾构隧道传感器布置方案优化方法,其特征在于,更新种群具体为
6.根据权利要求4所述的一种基于群智能的盾构隧道传感器布置方案优化方法,其特征在于,采用公式(4)和(5)计算两个种群的目标函数值。
7.根据权利要求6所述的一种基于群智能的盾构隧道传感器布置方案优化方法,其特征在于,根据得到的两个种群的目标函数值,进行非支配排序,更新外部存档,若溢出则删除掉最差的个体;
8.根据权利要求1所述的一种基于群智能的盾构隧道传感器布置方案优化方法,其特征在于,若迭代次数已达到设定的最大迭代次数,停止搜索;反之,在pb种群数大于零的前提下,pb种群转移1个个体到pa种群,pb无个体则不再转移,继续执行迭代。
9.根据权利要求1所述的一种基于群智能的盾构隧道传感器布置方案优化装置,其特征在于,包括
10.一种存储介质,其特征在于,所述存储介质中存储有计算机可执行指令,所述计算机可执行指令被处理器加载并执行时,实现如权利要求1至7任一项所述一种基于群智能的盾构隧道传感器布置方案优化方法的步骤。
技术总结本发明提供了一种基于群智能的盾构隧道传感器布置方案优化方法、装置、电子设备及存储介质,包括将布局问题转化为数学模型,初始化算法所有参数;基于混沌映射生成初始种群P,将初始种群P划分为两个子种群,计算两个种群的目标函数值,然后进行非支配排序,更新初始的外部存档,利用拥挤度距离排序选出精英集;迭代更新种群、计算所有个体目标函数值、更新外部存档和精英集;达到迭代次数后,停止搜索,输出外部存档中存储的Pareto前沿,并将解转化为对应的传感器布置方案,否则,继续迭代。本发明采用上述的一种基于群智能的盾构隧道传感器布置方案优化方法、装置、电子设备及存储介质,在优化传感器布局方面具有良好的速度和收敛性。技术研发人员:邢荣军,赵仲超,何川,徐湃,朱代强,李昱甫,李昱骏受保护的技术使用者:重庆交通大学技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/316307.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。