一种基于路径信息预测的铰接车辆辅助驾驶方法和系统
- 国知局
- 2024-10-15 10:09:20
本发明属于自动驾驶,尤其是涉及一种基于路径信息预测的铰接车辆辅助驾驶方法和系统。
背景技术:
1、
2、现有市面上面向大型货车的辅助驾驶系统大多局限于通过增加传感器数量来提高视觉精度,同时,只能提供大型车辆的位置信息,不能计算并判断行驶过程中的危险区域,故不能提前通知相关车辆和人员及时避闪,无法大幅度地提升铰接式车辆行驶时的安全率。中国发明专利cn114734966b提出了一种基于摄像头和云端实时地图的自动紧急制动系统,通过预测碰撞发生时间来进行车辆制动分析决策,实现无人驾驶状态下的车辆的完全紧急制动,无需依赖于驾驶员的反应与判断以及操作。但上述方法根据yolov3神经网络的输出计算车辆与潜在危险车辆的碰撞发生时间ttc,将其与动态设置的ttc阈值进行比较,设置行车危险系数,由于yolov3对物体位置的精确定位能力有限,故基于ttc值进行危险系数的评估结果可能不够准确,存在误操作的可能。因此,需要重新设计一种铰接车辆辅助驾驶方法,进一步提高复杂路况的实时应对能力,确保铰接车辆驾驶过程的安全性。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于路径信息预测的铰接车辆辅助驾驶方法和系统,进一步提高复杂路况的实时应对能力,确保铰接车辆驾驶过程的安全性。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明提供一种基于路径信息预测的铰接车辆辅助驾驶方法,包括以下步骤:
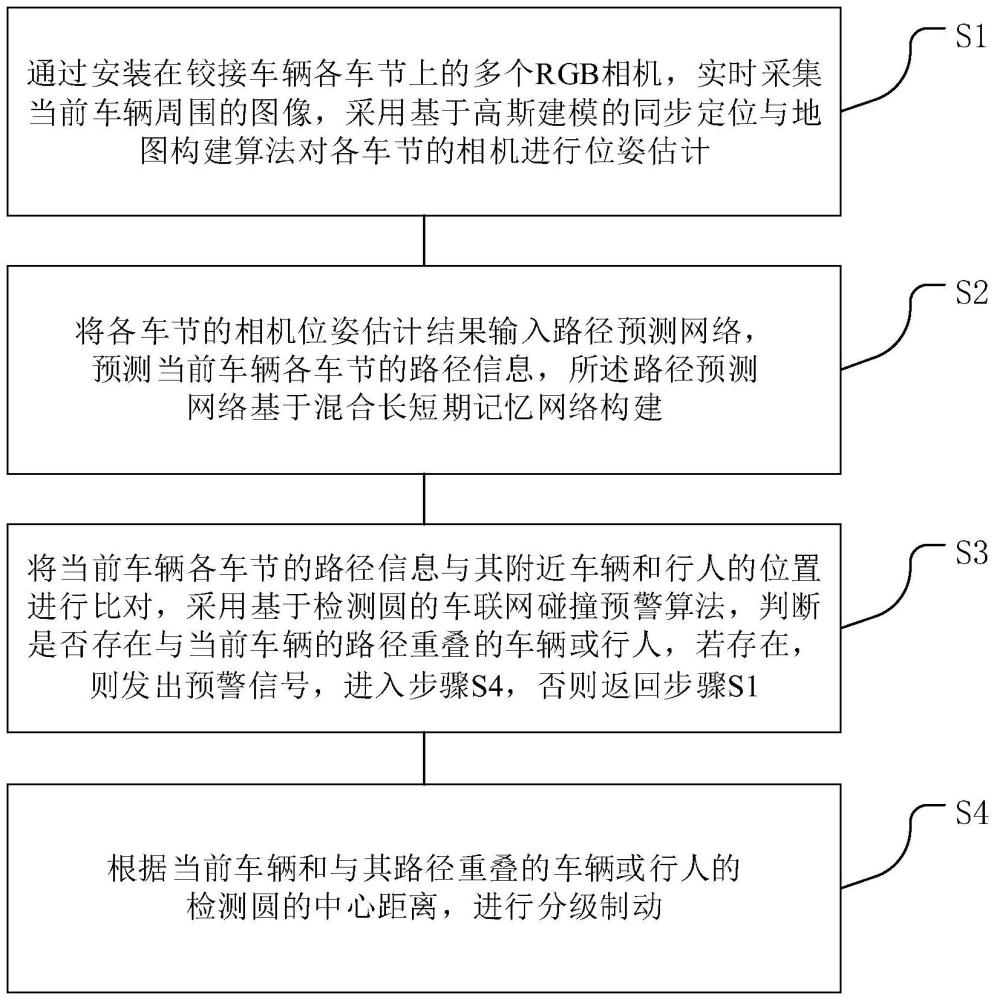
4、s1、通过安装在铰接车辆各车节上的多个rgb相机,实时采集当前车辆周围的图像,采用基于高斯建模的同步定位与地图构建算法对各车节的相机进行位姿估计;
5、s2、将各车节的相机位姿估计结果输入路径预测网络,预测当前车辆各车节的路径信息,所述路径预测网络基于混合长短期记忆网络构建;
6、s3、将当前车辆各车节的路径信息与其附近车辆和行人的位置进行比对,采用基于检测圆的车联网碰撞预警算法,判断是否存在与当前车辆的路径重叠的车辆或行人,若存在,则发出预警信号,进入步骤s4,否则返回步骤s1;
7、s4、根据当前车辆和与其路径重叠的车辆或行人的检测圆的中心距离,进行分级制动。
8、进一步地,步骤s1中,采用基于高斯建模的同步定位与地图构建算法对各车节的相机进行位姿估计的具体过程如下:
9、s101、获取当前车辆周围的图像,通过orb算法提取关键特征点;
10、s102、根据通过高斯分布表征的关键特征点,通过同步定位与地图构建算法估计相机位姿。
11、进一步地,步骤s102的具体过程为:
12、将相机运动描述为刚体运动,则相机位姿估计的表达式为:
13、c′=rc+t
14、其中,c′为相机位姿的预估结果,c为当前相机位姿,r为旋转矩阵,t为平移向量;
15、以最小化重投影误差为目标,构建运动估计模型,并采用梯度下降法进行优化;
16、所述重投影误差的表达式为:
17、f(r,t)=∑i||p′i-f(r,t,pi)||2
18、其中,p′i为关键特征点的预测位置,pi为关键特征点的实际位置。
19、进一步地,步骤s2中,所述路径预测网络包括卡尔曼滤波子网络、卷积子网络和混合长短期记忆子网络,所述混合长短期记忆子网络包括正向lstm层、双向lstm层和反向lstm层。
20、进一步地,通过所述路径预测网络预测当前车辆各车节路径信息的过程具体如下:
21、s201、通过当前车辆各车节的自身传感器获取车节速度信息;
22、s202、根据步骤s1估计的相机位姿生成车节位置信息,通过所述卡尔曼滤波子网络进行平滑噪声处理后,与所述车节速度信息共同输入所述卷积子网络进行特征提取;
23、s203、将特征提取结果输入所述混合长短期记忆子网络,获得当前车辆各车节路径信息的预测结果。
24、进一步地,步骤s202中,所述卡尔曼滤波子网络进行平滑噪声处理的过程如下:
25、根据上一时刻的信息,进行状态预测和协方差预测;
26、根据预测结果计算卡尔曼增益,根据计算结果进行状态和协方差更新;
27、重复上述步骤,直至达到预设迭代次数。
28、进一步地,步骤s3中,采用基于检测圆的车联网碰撞预警算法判断是否存在与当前车辆的路径重叠的车辆或行人的过程如下:
29、s301、以当前车辆的车节中轴线上的多个采样点为圆心,分别以第一长度为直径做第一检测圆,所述第一长度的值为第一系数乘以当前车辆的车节宽度;
30、s302、以当前车辆附近车辆的车节中轴线上的多个采样点为圆心,分别以第二长度为直径做第二检测圆,所述第二长度的值为第二系数乘以当前车辆附近车辆的车节宽度;
31、s303、以当前车辆附近行人所处位置为圆心,以第三长度为半径做第三检测圆;
32、s304、分别计算所述第一检测圆与所述第二检测圆以及所述第三检测圆的中心距离,若不大于相应两检测圆的半径之和,则判断存在与当前车辆的路径重叠的车辆或行人,发出预警信号。
33、进一步地,步骤s4中,采用级联制动系统aebs进行分级制动。
34、进一步地,步骤s4中,所述分级制动具体如下:
35、当时,采取ⅰ级制动措施,向驾驶人员发出提醒信号;
36、当时,采取ii级制动措施,开启辅助驾驶,降低车速;
37、当时,采取iii级制动措施,开启辅助驾驶,采取紧急刹车措施;
38、其中,r1和分别为当前车辆第k个检测圆的半径和圆心坐标,r2和分别为与当前车辆路径重叠的车辆或行人第k个检测圆的半径和圆心坐标。
39、本发明还提供一种基于路径信息预测的铰接车辆辅助驾驶系统,包括车载端子系统和云端子系统,所述车载端子系统包括感知单元、决策单元和控制单元,所述云端子系统包括数据存储单元和防碰撞检测单元;
40、其中,所述感知单元包括安装在铰接车辆各车节上的多个rgb相机,用于实时采集当前车辆周围的图像;所述决策单元用于根据所述感知单元采集的图像,采用基于高斯建模的同步定位与地图构建算法对各车节的相机进行位姿估计,基于各车节的相机位姿估计结果,通过路径预测网络预测当前车辆各车节的路径信息,并上传至所述数据存储单元,所述路径预测网络基于混合长短期记忆网络构建;所述防碰撞检测单元用于将存储于所述数据存储单元中的当前车辆各车节的路径信息与其附近车辆和行人的位置进行比对,采用基于检测圆的车联网碰撞预警算法,判断是否存在与当前车辆的路径重叠的车辆或行人,若存在,则向所述控制单元发出预警信号;所述控制单元接收到所述防碰撞检测单元发出的预警信号后,根据当前车辆和与其路径重叠的车辆或行人的检测圆的中心距离,进行分级制动。
41、与现有技术相比,本发明具有以下有益效果:
42、本发明通过安装在铰接车辆各车节上的多个rgb相机,实时采集当前车辆周围的图像,然后采用基于高斯建模的同步定位与地图构建算法对各车节的相机进行位姿估计,在同步定位与地图构建算法中引入高斯建模对关键特征点进行表征,可以保障位姿估计的实时性和精度,提高渲染速度和渲染质量;其次,将各车节的相机位姿估计结果输入路径预测网络,预测当前车辆各车节的路径信息,路径预测网络包括卡尔曼滤波子网络、卷积子网络和混合长短期记忆子网络,其中,卡尔曼滤波子网络可以有效地平滑噪声,提高后续预测的准确性,卷积子网络可以从数据空间中有效提取关键特征,混合长短期记忆子网络包括正向lstm层、双向lstm层和反向lstm层,可以较好地处理时间依赖关系,故通过该路径预测网络可以准确进行路径预测;最后,将当前车辆各车节的路径信息与其附近车辆和行人的位置进行比对,采用基于检测圆的车联网碰撞预警算法,判断是否存在与当前车辆的路径重叠的车辆或行人,若存在,则发出预警信号,并根据当前车辆和与其路径重叠的车辆或行人的检测圆的中心距离,进行分级制动,能够最大程度地避免急刹风险,同时确保在紧急情况下能够迅速停车,进一步提高铰接车辆驾驶的安全性。
本文地址:https://www.jishuxx.com/zhuanli/20241015/316615.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表