车辆滑行控制方法、装置、车辆及存储介质与流程
- 国知局
- 2024-10-15 10:07:16
本公开涉及车辆,具体涉及一种车辆滑行控制方法、装置、车辆及存储介质。
背景技术:
1、电动汽车如何增加续航能力一直是行业的一大技术难点,电池技术尚未取得更大突破的当下,减少电量消耗和动能回收成为增加续航的主要手段。动能回收主要表现在滑行回馈控制。滑行回馈的控制,行业研究较早也较为成熟,主要焦点在于如何控制滑行过程扭矩。
2、随着智能网联技术的进步和发展,距离控制的滑行回馈方式逐渐被使用。一些相关技术中,通过智能化网联功能提示的前方减速场景信息字典提示驾驶员松开踏板,并分段计算从各个离散时刻开始匀速滑行到目标速度所能回收的能量,并在驾驶员松油门后选择能量回收最高的时刻开始匀减速滑行,以减少驾驶员踩制动的操作。但是上述方法实际采用的是全程匀减速滑行,动能回收仍然较少,效果较差。
技术实现思路
1、本公开的目的之一在于提供一种车辆滑行控制方法,待控制车辆与第一前方目标的距离较小且待控制车辆的速度相对第一前方目标的速度较大时,可采用先匀减速滑行再空滑滑行的分段滑行控制,可以提高动能回收效果和保障回收过程车辆的安全;本公开的目的之二在于提供一种车辆滑行控制装置;本公开的目的之三在于提供一种车辆;本公开的目的之四在于提供一种存储介质。
2、为了实现上述目的,第一方面,本公开提供一种车辆滑行控制方法,所述车辆滑行控制方法包括:
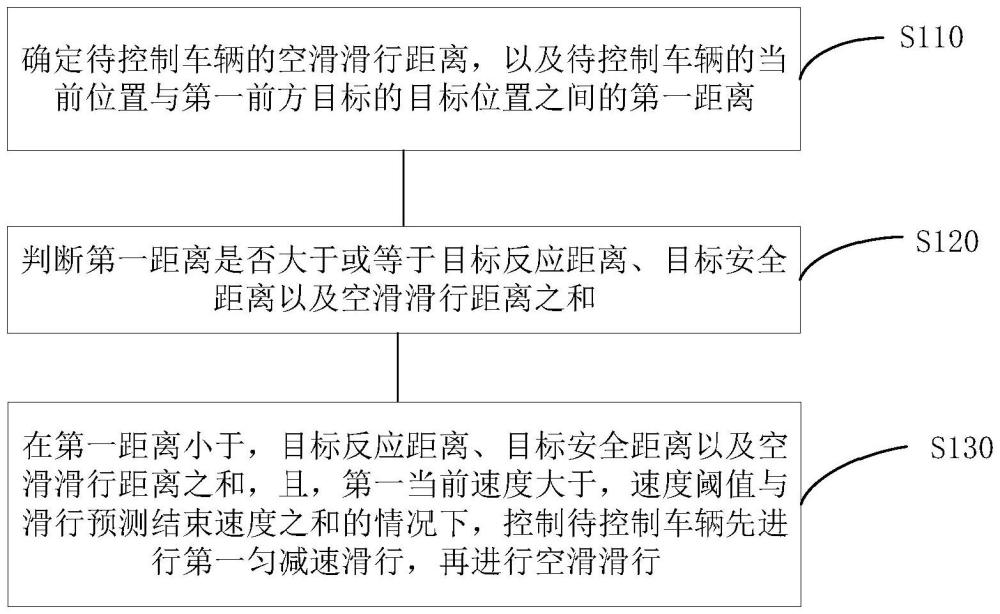
3、确定待控制车辆的空滑滑行距离,以及所述待控制车辆的当前位置与第一前方目标的目标位置之间的第一距离;其中,所述第一前方目标为,所述待控制车辆当前所处车道上的前方目标;所述空滑滑行距离为,所述待控制车辆由第一当前速度空滑滑行至与所述第一前方目标的速度相同的过程中,所述待控制车辆滑行的距离;所述目标位置为,所述待控制车辆由所述第一当前速度空滑滑行至与所述第一前方目标的速度相同时,所述第一前方目标所处的位置;所述第一当前速度为所述待控制车辆当前的速度;
4、判断所述第一距离是否大于或等于目标反应距离、目标安全距离以及所述空滑滑行距离之和;其中,所述目标反应距离为,所述待控制车辆在驾驶员反应时间内移动的距离;所述目标安全距离为,所述待控制车辆的跟车保持距离;
5、在所述第一距离小于所述目标反应距离、所述目标安全距离以及所述空滑滑行距离之和,且,所述第一当前速度大于,速度阈值与滑行预测结束速度之和的情况下,控制所述待控制车辆先进行第一匀减速滑行,再进行空滑滑行;其中,所述滑行预测结束速度为,先进行第一匀减速滑行,再进行空滑滑行时,预测的滑行结束速度。
6、可选地,所述控制所述待控制车辆先进行第一匀减速滑行,包括:
7、基于所述第一当前速度、所述第二当前速度、所述目标反应距离、所述目标安全距离以及所述第一前方目标的当前加速度,确定所述第一匀减速滑行的匀减速运动数据;其中,所述匀减速运动数据包括第一匀减速加速度和第一匀减速结束速度;所述第一匀减速结束速度为,所述待控制车辆在所述第一匀减速滑行结束时的速度;
8、以所述匀减速运动数据,控制所述待控制车辆的所述第一匀减速滑行。
9、可选地,所述基于所述第一当前速度、所述第二当前速度、所述目标反应距离、所述目标安全距离以及所述第一前方目标的当前加速度,确定所述第一匀减速滑行的匀减速运动数据,包括:
10、基于所述第一当前速度、所述第二当前速度、所述目标反应距离、所述目标安全距离以及所述第一前方目标的当前加速度,确定多组离散运动数据;所述离散运动数据包括相互对应的离散加速度和第一匀减速预测结束速度;所述第一匀减速预测结束速度为,以相应的所述离散加速度作所述第一匀减速滑行时,所述待控制车辆匀减速滑行结束时的速度;
11、基于多组所述离散运动数据,确定多组预测回收动能;其中,多组所述预测回收动能与多组所述离散运动数据相一一对应;
12、将多组所述预测回收动能中,最大的所述预测回收动能对应的所述离散运动数据,确定为所述匀减速运动数据。
13、可选地,所述车辆滑行控制方法包括:
14、在所述第一距离小于所述目标安全距离、所述目标反应距离以及所述空滑滑行距离之和,且,所述第一当前速度小于或等于所述速度阈值与所述滑行预测结束速度之和的情况下,控制所述待控制车辆进行第二匀减速滑行。
15、可选地,所述控制所述待控制车辆进行第二匀减速滑行,包括:
16、将第二匀减速滑行配置信息中与第一当前距离对应的设定加速度,确定为第二匀减速加速度;其中,所述第一当前距离为,所述待控制车辆与所述第一前方目标当前的距离;所述第二匀减速配置信息包括,多个设定距离与多个设定加速度的一一对应关系;
17、以所述第二匀减速加速度,控制所述待控制车辆的所述第二匀减速滑行。
18、可选地,所述判断所述第一距离是否大于目标反应距离、目标安全距离以及所述空滑滑行距离之和之前,所述车辆滑行控制方法,包括:
19、基于标定的反应时长以及所述第一当前速度,确定所述目标反应距离;和/或,
20、将目标安全距离配置信息中与所述第一当前速度对应的设定安全距离,确定为所述目标安全距离;其中,所述目标安全距离配置信息包括,多个设定第一当前速度与多个设定安全距离的一一对应关系。
21、可选地,所述车辆滑行控制方法包括:
22、在所述第一距离小于所述目标安全距离、所述目标反应距离以及所述空滑滑行距离之和的情况下,输出第一提示信息;其中,所述第一提示信息为,提示采取降低加速度的措施的信息。
23、可选地,所述车辆滑行控制方法包括:
24、在输出所述第一提示信息的情况下,若未检测到所述待控制车辆执行与所述第一提示信息对应的动作,则控制所述第一提示信息的颜色随第一当前距离的缩短而加深;其中,所述第一当前距离为,所述待控制车辆与所述第一前方目标当前的距离。
25、可选地,所述车辆滑行控制方法包括:
26、在输出所述第一提示信息的情况下,若第二前方目标与所述待控制车辆的第二当前距离大于所述第一当前距离,则输出第二提示信息;其中,所述第二前方目标为,所述待控制车辆所处车道的侧方车道上的前方目标;所述第二提示信息为,提示更换车道的信息。
27、可选地,所述车辆滑行控制方法包括:
28、在输出所述第二提示信息的情况下,若未检测到所述待控制车辆执行与所述第二提示信息对应的动作,且未检测到所述待控制车辆执行与所述第一提示信息对应的动作,则控制所述第一提示信息的颜色随所述第一当前距离的缩短而加深,且则控制所述第二提示信息的颜色随所述第一当前距离的缩短而加深。
29、可选地,所述车辆滑行控制方法包括:
30、在输出所述第二提示信息的情况下,若所述第一当前距离小于或等于第三距离,则输出第三提示信息;其中,所述第三距离为,所述待控制车辆由所述第一当前速度,以第一设定加速度匀减速滑行至与所述第一前方目标的速度相同的过程中,所述待控制车辆的滑行距离;所述第三提示信息为,提示采取制动措施的信息。
31、可选地,所述车辆滑行控制方法包括:
32、在输出所述第三提示信息的情况下,若未检测到所述待控制车辆执行与所述第三提示信息对应的动作,控制所述第二提示信息的颜色随所述第一当前距离的缩短而加深,直至所述第一当前距离达到第四距离;其中,所述第四距离为,所述待控制车辆由所述第一当前速度,以第二设定加速度匀减速滑行至与所述第一前方目标的速度相同的过程中,所述待控制车辆的滑行距离。
33、为了实现上述目的,第二方面,本公开提供一种车辆滑行控制装置,所述车辆滑行控制装置包括:
34、确定模块,用于确定待控制车辆的空滑滑行距离,以及所述待控制车辆的当前位置与第一前方目标的目标位置之间的第一距离;其中,所述第一前方目标为,所述待控制车辆当前所处车道上的前方目标;所述空滑滑行距离为,所述待控制车辆由第一当前速度空滑滑行至与所述第一前方目标的速度相同的过程中,所述待控制车辆滑行的距离;所述目标位置为,所述待控制车辆由所述第一当前速度空滑滑行至与所述第一前方目标的速度相同时,所述第一前方目标所处的位置;所述第一当前速度为所述待控制车辆当前的速度;
35、控制模块,用于判断所述第一距离是否大于或等于目标反应距离、目标安全距离以及所述空滑滑行距离之和;其中,所述目标反应距离为,所述待控制车辆在驾驶员反应时间内移动的距离;所述目标安全距离为,所述待控制车辆的跟车保持距离;还用于在所述第一距离小于所述目标反应距离、所述目标安全距离以及所述空滑滑行距离之和,且,所述第一当前速度大于,速度阈值与滑行预测结束速度之和的情况下,控制所述待控制车辆先进行第一匀减速滑行,再进行空滑滑行;其中,所述滑行预测结束速度为,先进行第一匀减速滑行,再进行空滑滑行时,预测的滑行结束速度。
36、为实现上述目的,第三方面,本公开还提供一种车辆,所述车辆还包括:处理器和存储器,所述处理器用于执行所述存储器中存储的控制程序,以实现如第一方面任一项所述车辆滑行控制方法。
37、为实现上述目的,第四方面,本公开还提供一种存储介质,所述存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以实现如第一方面任一项所述车辆滑行控制方法。
38、本公开的有益效果:
39、本公开中,在检测到待控制车辆当前所处车道上的前方目标后,假设待控制车辆以当前速度和当前位置作为开始,进行空滑滑行,上述前方目标继续维持其当前速度和当前加速度。待控制车辆的速度空滑滑行至与上述前方目标的速度相同时,空滑滑行结束。将待控制车辆上述空滑滑行的距离记为空滑滑行距离,将上述当前位置与上述空滑滑行结束时前方目标的位置之间距离记为第一距离。当第一距离小于目标反应距离、目标安全距离以及空滑滑行距离之和,且,待控制车辆开始上述空滑滑行时的当前速度,大于速度阈值与上述空滑滑行开始时第一前方目标的当前速度之和的情况下,可控制待控制车辆先进行第一匀减速滑行,再进行空滑滑行,以提高动能回收效果。仿真分析表明,以120kmph滑停500m距离为例,本公开的分段滑行相对于全程匀减速滑行,回收动能可增加超过15%。
40、当第一距离小于目标反应距离、目标安全距离以及空滑滑行距离之和,且,待控制车辆开始上述空滑滑行时的当前速度,小于或等于速度阈值与上述空滑滑行开始时第一前方目标的当前速度之和的情况下,可控制待控制车辆进行第二匀减速滑行,而不再空滑滑行,以更快地与第一前方目标迅速拉开安全距离,保证行驶安全。
41、另外,本公开还可结合第一前方目标的运动状态、待控制车辆的运动状态,以及相关的距离和车道情况,提供例如松油门提醒、踩制动提醒、转向提醒等等提示信息,让驾驶员直观清楚例如松油门滑行的时刻和必须踩制动的时刻,更好地保障驾驶安全。
本文地址:https://www.jishuxx.com/zhuanli/20241015/316491.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表