一种3D立体防护用激光探测测距仪及测距方法与流程
- 国知局
- 2024-10-15 10:12:50
本发明涉及激光测距仪,尤其涉及一种3d立体防护用激光探测测距仪及测距方法。
背景技术:
1、注塑自动化设备中,机械手已经成为注塑机的标配,从注塑机生产好到机械手抓取出来放到指定收集产品的位置。在整个过程中注塑机和机械手时间周期完全匹配,全由系统一体控制,在这个过程中如果人员误入机械手模外下行位置,很容易造成人员误伤。
2、传统使用护栏方式,防止人员进入机械手模外下行位置。
3、但是,护栏占用空间,人员维修调试很不方便,有新的防护要求,又得更换重装。
技术实现思路
1、本发明的目的在于提供一种3d立体防护用激光探测测距仪及测距方法,解决了传统使用护栏方式,占用空间,人员维修调试很不方便,有新的防护要求,又得更换重装,使用不便的问题。
2、为实现上述目的,本发明提供了一种3d立体防护用激光探测测距仪,包括外壳,还包括感应组件和安装组件;
3、所述感应组件与所述外壳连接,所述安装组件与所述外壳连接,所述感应组件包括红外镜头、激光照明系统、处理器和高速通信接口,所述红外镜头与所述处理器连接,所述激光照明系统与所述处理器连接,所述高速通信接口与所述处理器连接;
4、所述激光照明系统,用于发射激光束;
5、所述红外镜头,用于接收目标物体反射回来的激光信号;
6、所述处理器,用于处理生成3d点云数据;
7、所述高速通信接口,用于将生成的3d点云数据实时传输到外部设备。
8、其中,所述感应组件还包括拍摄模块,所述拍摄模块与所述处理器连接;
9、所述拍摄模块,用于获取目标物体的图像信息,并将图像信息上传至所述处理器。
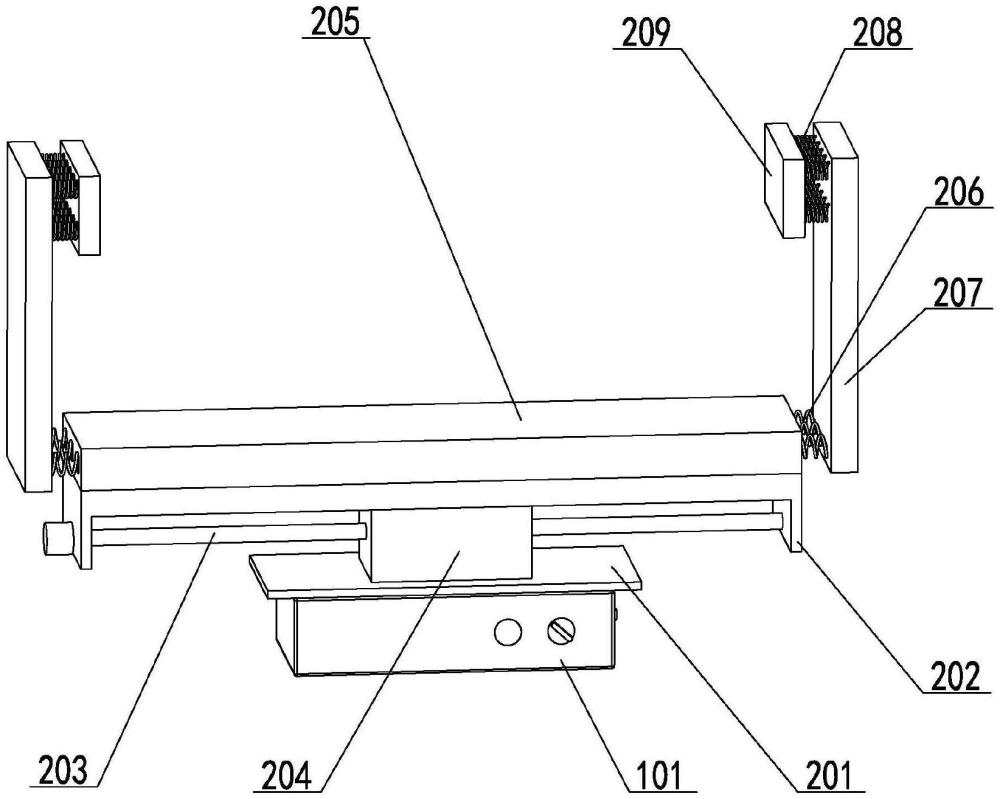
10、其中,所述安装组件包括安装板、移动构件和夹持构件,所述安装板与所述外壳固定连接,并位于所述外壳的顶部;所述移动构件与所述安装板连接,所述夹持构件与所述移动构件连接。
11、其中,所述移动构件包括基座、传动丝杠和传动滑块,所述传动滑块与所述安装板固定连接,并位于所述安装板的顶部;所述传动丝杠与所述传动滑块连接,并贯穿所述传动滑块;所述基座与所述传动丝杠转动连接,并与所述传动滑块滑动连接。
12、其中,所述夹持构件包括夹持板和紧固部件,所述夹持板与所述基座拆卸连接,并位于所述基座的顶部;所述紧固部件与所述夹持板连接。
13、其中,所述紧固部件包括连接弹簧和夹块,夹块的数量为两个,两个所述夹块分别相对位于所述夹持板的两端;两个所述夹块与所述夹持板之间分别通过多个所述连接弹簧连接。
14、一种3d立体防护用激光探测测距仪测距方法,包括以下步骤:
15、激光照明系统发射一束激光束,并照射目标物体,目标物体反射回来的激光信号被红外镜头接收;
16、处理器根据激光束从发射到反射回来的时间,计算出目标物体的距离;
17、拍摄模块将拍摄的目标物体的图像信息上传至所述处理器;
18、所述处理器将图像信息会与距离信息相结合,生成完整的3d点云数据;
19、高速通讯接口将生成的3d点云数据实时传输到外部设备。
20、本发明的一种3d立体防护用激光探测测距仪及测距方法,所述安装组件将所述外壳安装在机械手横梁上或其他需要防护区域,所述激光照明系统发射一束激光束并照射目标物体,目标物体反射回来的激光信号会被所述红外镜头接收,所述处理器通过测量激光束从发射到反射回来的时间,计算出目标物体的距离,这个距离信息作为3d点云数据的一部分被记录下来,同时,所述拍摄模块拍摄获取目标物体的图像信息,这些图像信息上传至所述处理器,与距离信息相结合,生成完整的3d点云数据,所述处理器对生成的3d点云数据进行处理和优化,以提高其精度和准确性,通过所述高速通信接口上传至与设备连接的计算机上进行处理和分析,计算机由此控制机械手在模内抓取产品,人员进入区域不影响机械手运行,正常抓取住并运行至模外,这时若人员还在区域则机械手不下行放产品,并警示人员让其离开,防止因意外造成人身安全事故,若人员离开则恢复正常。主动的安全防护,人员大意与疲劳时也能完全保护,实时检测,只控制有安全隐患的模外下行动作,不影响生产周期与节拍,指示灯提醒,有助于提高人员的生产安全意识,一套产品可保护多个区域,主动防护提醒,产品不占用空间、不影响生产,更换场景使用只需电脑重新设定保护区域即可,使用寿命长,使用方便。
技术特征:1.一种3d立体防护用激光探测测距仪,包括外壳,其特征在于,
2.如权利要求1所述的3d立体防护用激光探测测距仪,其特征在于,
3.如权利要求1所述的3d立体防护用激光探测测距仪,其特征在于,
4.如权利要求3所述的3d立体防护用激光探测测距仪,其特征在于,
5.如权利要求4所述的3d立体防护用激光探测测距仪,其特征在于,
6.如权利要求5所述的3d立体防护用激光探测测距仪,其特征在于,
7.一种3d立体防护用激光探测测距仪测距方法,适用于如权利要求1所述的3d立体防护用激光探测测距仪,其特征在于,包括以下步骤:
技术总结本发明涉及激光测距仪技术领域,具体涉及一种3D立体防护用激光探测测距仪及测距方法,包括外壳、感应组件和安装组件,感应组件包括红外镜头、激光照明系统、处理器和高速通信接口,安装组件对外壳安装,激光照明系统发射一束激光束并照射目标物体,目标物体反射回来的激光信号会被红外镜头接收,处理器计算出目标物体的距离,拍摄模块获取目标物体的图像信息,与距离信息相结合,生成完整的3D点云数据,通过高速通信接口上传至与设备连接的计算机上进行处理和分析,计算机由此控制机械手,主动防护提醒,产品不占用空间、不影响生产,更换场景使用只需电脑重新设定保护区域即可,使用寿命长,使用方便。技术研发人员:陈春明,卿政,刘清安,陈溢文,文艺,钟光喜,赵有兵受保护的技术使用者:桂林光隆科技集团股份有限公司技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/316809.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表