一种物联网举升机的制作方法
- 国知局
- 2024-10-21 14:32:23
本发明涉及升降机,具体为一种物联网举升机。
背景技术:
1、随着科技发展,物联网越来越普及使人们的生活变得越来越便利,生活中的越来越多的日常物理对象被连接到互联网中构成物联网供人们日常使用。人们生活中的日常物理对象在互联网和拓展的网络基础上,将各种信息传感设备和网络结合起来形成一个巨大网络,从而实现人、机、物的互联互通,将任何物体与网络相连接,物体通过信息传播媒介进行信息交换和通信,实现智能化识别、定位、跟踪、监管的功能。
2、在目前市场上面的四柱举升机一般分为定位四柱液压举升机和平板四柱液压举升机两大类型,作为传统的升降设备,这两大类型的四柱举升机都只能对汽车做机械性的升降,但在升降过程中汽车本体产生的重量变化需要工作人员时刻注意,设备的稳定性较差,并且在工作需要工作人员根据工作经验进行人工调节设备来稳定汽车重心,在高度变化和工作过程中存在较大的安全隐患。
技术实现思路
1、本发明的目的在于提供一种物联网举升机,以解决上述背景技术中提出的问题。
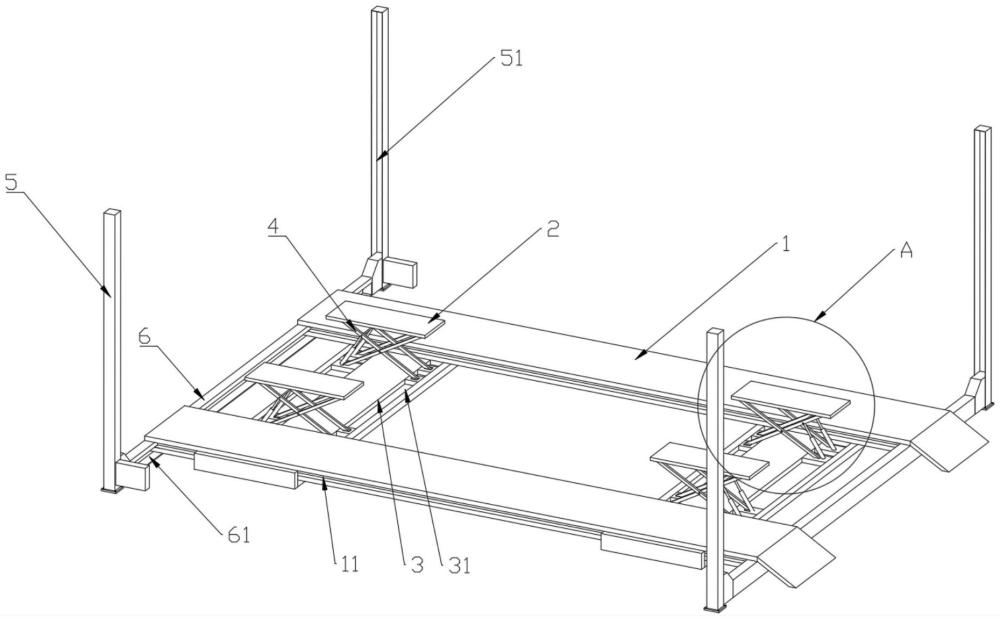
2、为了解决上述技术问题,本发明提供如下技术方案:一种物联网举升机其特征在于,包括主机平台、子机平台、滑动组件、升降组件;
3、其中,所述主机平台底部设有电动滑轨一,所述滑动组件两端延伸至与电动滑轨一连接,所述电动滑轨一控制所述滑动组件移动;
4、所述滑动组件用于带动所述升降组件移动,所述升降组件用于带动子机平台上升或者下降;
5、以及横梁,所述横梁设置于所述主机平台两端,两个所述横梁平行设置,所述横梁侧壁设有电动滑轨二,所述电动滑轨二控制所述主机平台移动;
6、所述横梁的两端延伸至与立柱连接,所述立柱上设置有电动滑轨三,所述电动滑轨三用于控制所述横梁移动;
7、以及物联网控制模块,所述物联网控制模块用于对举升机工作时的数据进行收集,并根据收集到的数据进行分析,得到汽车重心分析结果对举升机进行控制,并将收集到的汽车数据传递给用户终端。
8、进一步的,所述滑动组件包括电动滑轨四,所述电动滑轨四顶部设有滑动槽,所述滑动槽内设有相匹配的滑动块,所述升降组件与所述滑动块连接,所述滑动块用于控制移动升降组件移动。
9、进一步的,所述升降组件包括、第一连杆、第二连杆以及伸缩油缸;
10、所述第一连杆与所述第二连杆交叉设置,所述第一连杆和第二连杆的端部延展至与不同的所述滑动块铰接,所述第二连杆的一端设有支耳,所述伸缩油缸的一端与所述支耳连接,所述伸缩油缸的另一端与所述滑动块连接,所述伸缩油缸用于控制第一连杆和第二连杆带动所述子机平台上升或下降。
11、进一步的,所述物联网控制模块包括扫描单元、重力单元和通信控制单元;
12、所述扫描单元用于扫描车辆,获取车辆车牌信息、车胎与上车板的位置关系、车辆举升时的车辆底盘平面扫描图像和车辆零件拆卸时实景图像;
13、所述重力单元用于检测汽车到达主机平台时的重力和重心位置,以及汽车在举升过程中主机平台和子机平台受到的重力变化情况,通过重力变化分析出重心位置改变结果,并在维修过程中对零件拆卸引起的重心改变进行分析,对主机平台和子机平台进行调整,保持举升过程和维修过程中的重心稳定;
14、所述通信控制单元用于收集所述扫描单元和所述重力单元获得的车辆信息和重力改变数据,对举升机进行控制调整,将车辆信息和重力改变数据传递给用户终端。
15、进一步的,所述扫描单元包括:
16、获取车辆与举升机之间的距离,当两者之间的距离达到阈值时,通过摄像头组件获取汽车前视图图像,并根据图像内容分析车辆车牌、汽车车胎左右间距,通过分析得到的汽车车胎左右间距调节主机平台在电动滑轨二上移动,使主机平台之间的间距满足汽车车胎左右间距要求,等主机平台移动完成时记录此时时间;
17、在举升过程中,所述摄像头组件对汽车底盘的画面进行捕捉,构建基准面进行分析;
18、在车辆举升稳定需要进行拆卸零件修理时,获取拆卸零件的实景图像并对此刻的时间进行记录。
19、进一步的,所述重力单元包括:
20、主机平台和子机平台上的压力传感器获取汽车各个方向上的重力数据;
21、当汽车通过所述扫描单元扫描,分析出汽车车胎尺寸和汽车车胎左右间距后,调整所述主机平台的间隔距离后,分析此时举升机的重心;
22、其中分析举升机重心的过程为:
23、构建坐标系,将此时举升机的重心在主机平台所在水平面上的投影作为原点o,定义汽车向前方向为正方向,汽车向左为负方向,汽车向上为正方向,将主机平台所在的水平面作为基准面θ0;
24、当汽车到达主机平台上并进行稳定举升后,所述主机平台两端平面上的传感器对汽车轮胎四个方位的重力进行检测,其所述四个方位的传感器读数为:前左fl、前右fr、后左rl、后右rr;
25、将所述传感器在四个方位上的读数转化为重力分量,使传感器读数和车辆实际重量成正比;
26、对每个传感器,计算其重力分量和其位置与车辆中心点的距离的乘积,产生了一个力矩,表示该方向上的重力矩,所述汽车轮胎四个方向上的力矩为xfl、xfr、xrl、xrr,四个方向上的重力矩相加得到车辆的总力矩;
27、根据重力矩的平衡条件∑m=0,要使∑m=0,重心位置xcg需要满足:
28、∑m=fl×(-xfl)+fr×xfr+rl×(-xrl)+rr×xrr=0
29、得出重心位置xcg,此时的举升高度为h1;
30、将所述重心位xcg设置为新原点o1;
31、计算新原点o1在主机平台所在水平面上的投影和原点o距离为偏移量l1,设置第一举升偏移阈值为λ1;
32、当l1≤λ1时,在举升高度h1情况下,使用主机平台对汽车继续举升,举升到h2高度并进行稳定;
33、当l1>λ1时,在举升高度h1情况下,调整子机平台重心位置,使用子机平台对汽车继续举升,举升到h2高度并进行稳定;
34、当工作人员需要对汽车进行拆卸零件修理时,压力传感器读数发生改变,通过所述扫描单元获取拆卸零件的实景图像并对此刻的时间进行记录,对汽车重心二次变化进行分析:
35、通过所述主机平台上传感器读数前左fl'、前右fr'、后左rl'、后右rr'或子机平台传感器读数前左fl2'、前右fr2'、后左rl2'、后右rr2',分析得到此时的汽车重心位置xcg2;
36、计算所述汽车重心位置xcg2在主机平台所在水平面上的投影和原点o距离为偏移量l2,设置第二举升偏移阈值为λ2;
37、当l2≤λ2时,举升机保持所述主机平台和所述子机平台举升状态,记录此时重力单元内传感器读数以及此时的时间;
38、当l2>λ2时,举升机需调整目前举升状态:
39、在举升高度h1至举升高度h2过程中,由主机平台对汽车进行举升时,调整子机平台重心位置对汽车进行二次举升;
40、在举升高度h1至举升高度h2过程中,由子机平台对汽车进行举升时,调整升降组件高度,降下子机平台,使汽车落回主机平台,调整子机平台重心位置对汽车进行二次举升。
41、进一步的,所述调整子机平台重心位置,具体过程如下:
42、通过摄像头模组将汽车底盘作为基准面θ1,所述新原点o1为基准面中心点,通过重力单元分析四个方向的力矩xfl、xfr、xrl、xrr和子机平台所在位置得到四个点位x1、x2、x3、x4使子机平台重力矩∑m=0,定义汽车向前方向为x轴正方向,汽车向左为y轴负方向,汽车向上为z轴正方向;
43、通过所述滑动组件在所述主机平台上的移动控制所述升降组件和所述子机平台在x轴方向移动距离m,通过所述电动滑轨四顶部滑动槽内设置的滑动块移动控制所述升降组件和所述子机平台在y轴方向移动距离n,使子机平台中心点和所述四个点位x1、x2、x3、x4重合,通过伸缩油缸伸长控制第一连杆和第二连杆水平夹角减小,提升升降组件高度,上升子机平台,对汽车进行举升,并记录此时子机平台上四个方向传感器读数:前左fl、前右fr、后左rl、后右rr,得到此时的汽车重量。
44、进一步的,所述物联网模块通过通信控制单元将所述一种物联网举升机收集到的汽车数据和信息传递给用户终端,用户和修理工作人员可以通过用户终端实时了解到车辆车牌信息、汽车修理维修时间、汽车零件更换情况、更换时间以及零件更换实景图。
45、与现有技术相比,本发明所达到的有益效果是:本发明旨在通过物联网对汽车举升过程中一些参数进行联网传输,可以在汽车举升过程中收集到汽车车牌信息、汽车修理维修时间、汽车零件更换情况、更换时间以及零件更换实景图,并通过物联网模块传递给用户终端,让用户更好的了解自己汽车的维修情况;
46、在汽车维修举升过程中,可以通过重力单元分析汽车在举升和维修拆卸零件过程中的重心变化情况,对主机平台和子机平台的举升状态进行调整,保持汽车举升过程和维修过程中的重心稳定,使汽车修理工作人员在修理过程中更加安全方便。
本文地址:https://www.jishuxx.com/zhuanli/20241021/318509.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表