一种基于点云配准的GIS设备变形检测方法
- 国知局
- 2024-10-21 14:42:32
本发明涉及工业设备变形检测,具体涉及一种基于点云配准的gis设备变形检测方法。
背景技术:
1、随着电网发生事故的概率的不断上升,电网中电气设备的安全问题正日益成为导致事故的主要原因之一。gis(gas insulated switchgear),即气体绝缘开关设备,是现代电力系统中关键的电气设备,主要用作绝缘和灭弧介质的开关设备。该设备凭借设备紧凑、占地面积小等独特优势在全国高压电网中得到广泛应用。但其一般采用长距离、多段分段拼接、架空的安装方式和易受温差变化、基础沉陷、设计安装等因素的影响,容易出现罐体变形、支架断裂、泄露等故障,严重危害电网安全运行、污染环境及影响人体健康。因此,对于电网安全而言,如何快速准确检测到焊缝、裂纹等变形并进行预测分析是一个目前待解决的问题。
2、针对gis设备及膨胀节变形的结构特点,目前主流gis壳体变形检测系统大致分为两类:人工测量与超声式测量。
3、以人工为主的检测方法是目前较主流的方法,该方法需要对膨胀节上安装机械式测量尺或在支座处做人工标记,这种测量方式需要大量的人力与重复操作。该方法测量所得结果存在误差大、工作效率低、无法实现实时测量等问题,从而影响到gis设备变形检测的准确性和连续性。基于超声技术为主的gis壳体缺陷检测,大多仅限于局部小变量进行缺陷检测分析,无法实现对大范围区域进行检测,在检测范围方面存在局限性。
4、gis设备的变形检测问题是一个涉及复杂性与随机性较大的目标检测过程。由于设备变形样本数据集较少,无法直接使用深度学习的方法进行模型训练。为此,提出一种基于点云配准的gis设备变形检测方法。
技术实现思路
1、本发明所要解决的技术问题在于:如何在样本数据稀少的情况下,通过点云配准的检测方式实现对gis设备变形的准确检测,提供了一种基于点云配准的gis设备变形检测方法。
2、本发明是通过以下技术方案解决上述技术问题的,本发明包括以下步骤:
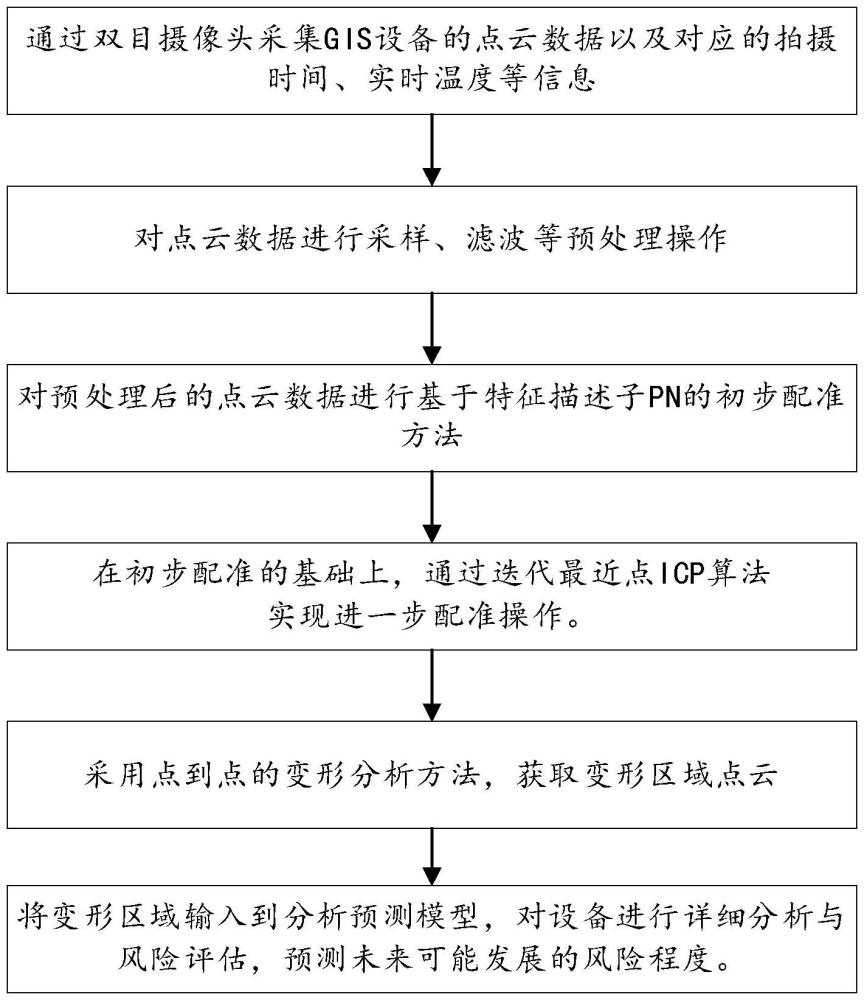
3、s1:数据采集
4、使用双目摄像头获取gis设备的三维点云数据;
5、s2:数据预处理
6、对获取的三维点云数据进行预处理,得到预处理后的点云数据;
7、s3:点云配准
8、利用特征描述子pn结合ransac算法进行点云数据的初步配准,然后再利用kd树邻近搜索法加速的icp算法进行点云数据的精确配准;
9、s4:变形检测
10、在点云配准的结果基础上,计算实测点云与理想点云之间的位移距离,并采用变形阈值公式确定变形阈值x,通过将变形阈值x与位移距离进行比较,识别所有的变形点并进行整合,从而确定gis设备的变形区域;
11、s5:模型预测分析
12、将检测到的变形区域输入至经过训练的预测模型之中,进而对变形区域进行详细分析和风险评估。
13、更进一步地,在所述步骤s2中,数据预处理过程具体如下:
14、s21:最远点采样
15、对三维点云数据进行最远点采样操作,从点云中随机选择一个点作为初始点,将其添加到采样点集合中,随后选择距离最远的点,并将其添加到采样点集合中,直到采样点达到所需数量停止采样;
16、s22:滤波处理
17、计算点云中每个采样点与该采样点邻域内点的平均距离和标准差,并移除距离超出设定阈值的点,以去除数据中的孤立点和噪声点;对于点云中的每个点,计算其与邻域内点的加权平均值,权重由高斯滤波器确定,以更新该点的数值。
18、更进一步地,在所述步骤s3中,初步配准的具体过程如下:
19、s301:使用球形距离度量的方法找到预处理后的点云数据中每个采样点对应的邻域点;
20、s302:对于每个中心点与邻域点上进行多层感知机操作,将每个点云数据转换为128维的特征向量,该特征向量即特征描述子pn;
21、s303:再利用特征描述子pn进行ransac算法匹配,建立一种近似的对应关系,从而实现经过预处理后的实测点云与理想点云的初步对齐。
22、更进一步地,在所述步骤s3中,ransac算法能够从含有多个异常值的数据集中提取出符合模型的有效数据点,从而得到可靠的模型参数估计,具体过程如下:
23、s3011:随机选择多个点对的子集,计算初始变换矩阵;
24、s3012:使用变换矩阵对点云进行初步变换,并与理想点云进行评估,观察是否符合点的数量要求;
25、s3011:重复上述步骤,直到达到一致性最大化或预期迭代次数,输出最佳模型。
26、更进一步地,在所述步骤s3中,所述icp算法通过迭代地找到两片点云之间的最近邻点对,并计算出最佳的刚性变换,使得一个点云能够对齐到另一个点云上。
27、更进一步地,在所述步骤s3中,在进行点云精确配准之前,利用所述kd树邻近搜索法对待配准点云与理想点云进行空间划分,构建kd-tree结构,kd树邻近搜索法能够将icp算法中搜索最近点的时间复杂度从线性降低到对数级别,从而提升icp算法的计算速度。
28、更进一步地,在所述步骤s4中,变形阈值x的计算公式如下:
29、x=k1c+k2a+t
30、其中,x为判定是否发生变形的最小变形阈值;c为精确配准后的重叠率;a为点云数据质量,通过实时温度确定;k1、k2为两项因素的比例因子;t为其他影响因素,通过分析拍摄设备稳定性得出。
31、更进一步地,在所述步骤s4中,当实测点云中某个点的位移距离超过变形阈值x,则将该点标记为变形点,遍历所有点,执行上述检测过程,从而筛选出所有的变形点,并将这些变形点汇总以形成一个明确的变形区域。
32、更进一步地,当出现单个变形点的情况,判断为点云获取时存在噪声情况,将该点去除。
33、更进一步地,预测模型基于轻量化的多层感知机实现,其具体处理过程如下:将变形区域的点云数据输入至三层感知机中进行特征提取,直到特征空间维度变为1024;在特征空间维度上进行最大池化操作,以提取点云数据中的全局特征向量;同时独立输入温度和位移向量,并将温度向量、位移向量、全局特征向量进行合并;将合并后的向量输入至多层感知机进一步处理,通过sigmoid激活函数输出一个二分类结果,该二分类结果表示“存在变形风险”或“不存在变形风险”。
34、本发明相比现有技术具有以下优点:
35、本发明针对于现有检测方法存在无法进行长时间检测和检测范围存在局限性的问题,实现了对大范围的gis设备变形和位移的实时拍摄并生成三维点云结构,且在使用过程中全程无需人工干预,实现长时间自动化变形检测。
36、本发明针对于变形样本数据少的检测问题,使用了基于点云配准技术来实现gis设备的变形检测,将理想模型与实测模型进行配准、对比来检测设备的变形部位。
37、本发明针对于配准算法计算量大、点云数据分布不均匀及存在噪声点的问题,使用了一种结合最远点采样以及高斯滤波的方法对点云数据进行处理,能够有效减少点云数据量,同时更好地覆盖整个点云结构。
38、本发明针对于传统初步配准方法错误匹配多、配准效率较低和icp算法对于配准点云初始位置要求较高的问题,提出一种基于新型特征描述子pn的初步配准算法结合迭代最近点icp算法的方法。
39、本发明可以对采集到的点云数据进行变形检测分析,对于gis设备后续运行过程中是否存在潜在风险进行预测。
40、本发明针对于主流的gis壳体缺陷检测系统所需硬件投入多、成本较高,而且监测对象数目有局限性,不利于现场快速、便捷的问题,三维高速成像系统选择便携式非接触、低成本的光学监测系统,实现了电网中gis壳体设备运营状态的及时有效检测与整体设备便携性与低成本的需求。
本文地址:https://www.jishuxx.com/zhuanli/20241021/319055.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。