基于扩散网络的三维对称图形匹配方法
- 国知局
- 2024-10-21 15:10:30
本发明属于计算机图形学,尤其涉及基于扩散网络的三维对称图形匹配方法。
背景技术:
1、在计算机图形学中,图形匹配是一个基础且重要的问题,广泛应用于纹理对应、形变对应和参数模型构建等领域。尽管经过几十年的研究,非刚性图形的匹配仍然是一个挑战,特别是在处理带有多对称性的图形时更是如此。
2、现有的三维对称图形匹配技术中,存在几个显著的缺点:1)对称混淆问题:现有基于神经网络的方法通常不能有效区分具有多对称性的图形,导致匹配过程中出现错误或混淆。这种对称混淆尤其在医学、生物学和工业设计领域的应用中造成了严重的影响。这类问题的原因是:大多数现有技术依赖于laplace谱特征进行形状分析和匹配。虽然这些特征对于某些类型的图形匹配有用,但它们在处理具有复杂对称性的图形时通常缺乏辨识力。2)泛用性差:传统方法往往对参数选择极为敏感,且多数算法针对特定数据集优化,其参数配置和性能表现难以广泛适用于不同的数据集。这限制了这些技术的应用范围和效果,特别是在需要处理多样化数据的实际应用场景中。3)匹配质量和效率问题:由于对称混淆和特征识别不足,现有算法在匹配质量和效率上往往不尽人意,特别是在处理大规模或高复杂度数据集时。为此提出基于扩散网络的三维对称图形匹配方法。
技术实现思路
1、本发明的目的在于提供基于扩散网络的三维对称图形匹配方法,旨在解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、基于扩散网络的三维对称图形匹配方法,包括以下步骤:
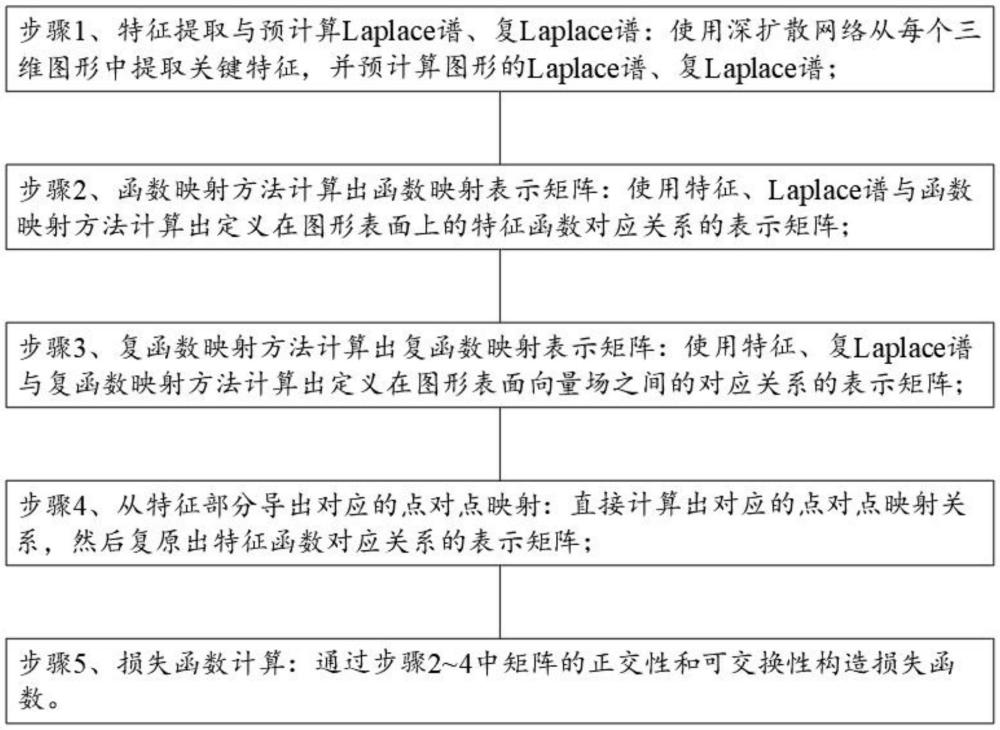
4、步骤1、特征提取与预计算laplace谱、复laplace谱:使用深扩散网络从每个三维图形中提取关键特征,并预计算图形的laplace谱、复laplace谱;
5、步骤2、函数映射方法计算出函数映射表示矩阵:使用特征、laplace谱与函数映射方法计算出定义在图形表面上的特征函数对应关系的表示矩阵;
6、步骤3、复函数映射方法计算出复函数映射表示矩阵:使用特征、复laplace谱与复函数映射方法计算出定义在图形表面向量场之间的对应关系的表示矩阵;
7、步骤4、从特征部分导出对应的点对点映射:直接计算出对应的点对点映射关系,然后复原出特征函数对应关系的表示矩阵;
8、步骤5、损失函数计算:通过步骤2-4中的矩阵的正交性和可交换性构造损失函数。
9、进一步的,所述步骤1的具体过程如下:
10、输入n组三维图形,每组两个,分别描述为图形x和图形y;对输入的两个三维图形计算laplace谱、复laplace谱及相关参数,包括特征值evals、特征向量evecs、复特征值c_evals、复特征向量c_evecs、梯度spec_grad、质量矩阵mass和矩阵l;以后缀标记所属图形,trans表示矩阵的转置,conj表示共轭;将三维图形的网格坐标输入扩散网络进行特征提取,得到特征feat_x、feat_y。
11、进一步的,所述步骤2的具体过程如下:
12、将所述图形x和图形y的laplace谱和特征输入到函数映射求解器,计算得出图形表面函数对应关系的矩阵表示cmn、cnm;公式如下:
13、式1:a=evecs_trans_x*feat_x;
14、式2:b=evecs_trans_y*feat_y;
15、式3:c=a*a_trans*b*a_trans;
16、其中,evecs_trans_x和evecs_trans_y分别表示x和y图形的特征向量的转置,a_trans是矩阵a的转置;
17、由式3即得到cmn,翻转矩阵a、矩阵b,即得到cnm。
18、进一步的,所述步骤3的具体过程如下:
19、将所述图形x和图形y的复laplace谱和特征输入到复函数映射求解器,计算得出图形表面由复laplace谱构成的复函数视作向量场得到的函数对应关系的矩阵表示qmn、qnm;公式如下:
20、式4:a=c_evecs_trans_x*feat_x;
21、式5:b=c_evecs_trans_y*feat_y;
22、式6:q=a*a_trans*(b*a_trans)_conj_trans;
23、其中,c_evecs_trans_x和c_evecs_trans_y分别表示x和y图形的复特征向量的转置,_conj_trans表示共轭转置;
24、由式6即得到qmn,翻转矩阵a、矩阵b,即得到qnm。
25、进一步的,所述步骤4的具体过程如下:
26、直接使用所述特征,相乘之后得到图形x和图形y之间的点对点映射关系πmn,公式如下:
27、式7:pi=feat_x*feat_trans_y;
28、其中,feat_trans_y表示特征feat_y的转置;
29、由式7即得到对应的πmn、翻转x、y,即得到πnm;再将式7视作函数构造出对应的函数对应关系的矩阵表示
30、进一步的,所述步骤5中,构造损失函数如下:
31、根据函数映射的可交换性添加约束:
32、式8:
33、根据函数映射的正交性添加约束:
34、式9:
35、将式8和式9组合,并乘以系数:
36、式10:lfmap=λbijlbij+λorthlorth;
37、根据复函数映射的可交换性添加约束:
38、式11:
39、根据复函数映射的正交性添加约束:
40、式12:
41、将式11和式12组合,并乘以系数:
42、式13:lcfmap=λcbijlcbij+λcorthlcorth;
43、在逐点映射部分,由于理论上有故损失函数设计为:
44、式14:
45、其中,最终损失函数为:
46、式15:ltotal=lfmap+lcfmap+λcoupllcouple;
47、其中,i为单位矩阵,f为矩阵的范数,t为转置操作,lbij为函数映射方法中交换性的损失,lorth为函数映射方法中正交性的损失,lfmap为函数映射方法的损失,λbij为lbij加权系数,λorth为lorth加权系数,lcbij为复函数映射方法中交换性的损失,lcorth为复函数映射方法中正交性的损失,lcfmap为复函数映射方法的损失,λcbij为lcbij加权系数,λcorth为lcorth加权系数,lcouple为逐点映射的损失,λcouple为加权系数,φm、φn分别为特征feat_x、feat_y。
48、进一步的,在所述步骤5之后,若进行神经网络训练,则让特征提取器学习数据集;若不进行神经网络训练,直接输出所述步骤4计算出的点对点映射关系。
49、与现有技术相比,本发明的有益效果是:
50、1、提升匹配精确度:本发明通过复函数映射技术和优化的点对点映射算法,极大地提高了匹配的精确度。复函数映射允许算法更准确地处理形状的局部对称性和复杂变形,从而确保匹配结果的高度一致性和准确性。
51、2、提高算法的鲁棒性:通过自适应特征选择和损失函数的优化,本发明的算法在处理多样化和非标准化数据时显示出更高的鲁棒性。算法能够有效地应对不同规模和复杂度的三维数据,包括那些在传统方法中难以处理的高对称性形状。
52、综上所述,本发明不仅提高了三维图形匹配的性能,也拓展了其在实际应用中的可用性和效果,特别是在需要处理大量复杂数据的领域中展现了其优越性。
本文地址:https://www.jishuxx.com/zhuanli/20241021/320737.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表