多编组胶轮电动列车坡道防溜控制方法及系统与流程
- 国知局
- 2024-11-06 14:32:15
本发明涉及轨道交通,特别是一种多编组胶轮电动列车坡道防溜控制方法及系统。
背景技术:
1、在新能源商用车与乘用车领域内已有许多整车企业拥有自己成熟的防溜坡控制功能,能够保证车辆在任意路面上实现短暂的防溜坡功能,这些功能的实现有些是通过增加相关的传感器检测坡度,电机力矩与机械制动力矩联合配合实现,有些则只通过电机力矩控制就可以实现。采用电机力矩的方式来实现坡道防溜功能,电机通常处于堵转状态,温升较大,因此防溜坡时间不能太长。现有的防溜坡相关方案都是围绕单轴驱动,针对多编组分布式轮边驱动列车的防溜坡功能,尚未有相关研究。
2、srt车辆属于道路列车,与轨道交通相比,其具有坡度较大,站间距少,路面湿滑状况复杂,启动频繁等特点。当进站停车或者坡道停车让行时,驾驶员一般会用力踩死脚刹防止车辆溜坡,这种操作方式非常耗费驾驶员精力和体力;如果驾驶员通过拉动手刹锁死车辆,当坡道起步时,先松掉手刹(或脚刹)再踩油门,这一系列操作流程较为复杂,而且在短时间内必须一气呵成完成,否则车辆会溜车。在空气制动参与的情况下,充放气过程不仅存在噪声,还耗气耗能,客户体验较差;如果司机操作不到位,列车后溜距离较长,容易与后面车辆相碰发生安全事故。
技术实现思路
1、本发明所要解决的技术问题是,针对现有技术不足,提供一种多编组胶轮电动列车坡道防溜控制方法及系统,无需坡道传感器,降低防溜坡功能的实现成本。
2、为解决上述技术问题,本发明所采用的技术方案是:一种多编组胶轮电动列车坡道防溜控制方法,包括以下步骤:
3、s1、当油门、刹车未操作,手刹未施加,列车速度为0时,给定初始力矩;所述初始力矩表示为:
4、fps=ave(∑fp(t)-max|fp(t)|-min|fp(t)|);
5、其中,fp(t)=mt·a(t)-fz(t)-ft(t),fz(t)=f·mt·g+cd·a·v(t)2/21.15;a(t)为列车t时刻的加速度,mt为列车总重量,ft(t)为列车t时刻总的电控力矩,fj1(t)与fj2(t)分别为t时刻列车第j车轴的第一电机反馈力矩与第二电机反馈力矩,n为列车节数,v(t)为列车t时刻的运行速度,g为重力加速度,ave()表示取平均值,cd为阻力系数,a为车辆的迎风面积;
6、s2、检测是否后溜,若是,则按照比例p%增大所述初始力矩,得到修正后的各电机控制器的电机反馈力矩;其中,δn为电机控制器单位时间内反馈的电机转速差;
7、s3、判断是否收到防溜坡退出操作请求,若是,则当牵引力大于下滑力时,进入正常牵引模式,启动列车。
8、本发明能够通过电机反馈力矩与瞬时加速度计算值预测坡度启动力矩,列车无需坡道传感器,降低了防溜坡功能的实现成本。
9、启动列车时,t时刻的电机反馈力矩最小值fstart(t)计算公式为:
10、
11、本发明的方法还包括:
12、s4、判断电机反馈力矩是否达到平衡,若是,则当防溜坡功能超过设定的持续时间时,按比例分配电机反馈力矩。
13、本发明采用分布式方式驱动列车,通过对控制电机的组队及力矩轮询控制减少了电机的堵转时间,优化了电机温升,提高了电机的使用寿命。
14、本发明中,将车轴按照两个一组的方式分为多组,将电机反馈力矩平均分配至各组;组内力矩的计算公式为:
15、
16、其中,fj(t)与fj+1(t)表示一组力矩,cconst表示总力矩,fmax为最大力矩。
17、一组车轴中,当力矩较大的车轴的温度在单位时间内上升超过设定度数,或者力矩较大的车轴维持较大力矩持续时间超过设定值时,减小该力矩较大车轴的力矩。
18、所述初始力矩的计算之前,进行包括如下步骤的操作:
19、1)判断列车是否处于制动工况,若是,则当列车速度低于设定值时,判断列车是否处于减速过程,若处于减速过程,则在列车不存在摩擦制动时,实时比对电机反馈力矩当前值与电机反馈力矩最大值、最小值的大小关系,若所述电机反馈力矩当前值大于电机反馈力矩最大值,则将电机反馈力矩当前值设置为电机反馈力矩最大值,若电机反馈力矩当前值小于电机反馈力矩最小值,则将电机反馈力矩当前值设置为电机反馈力矩最小值
20、2)判断列车速度是否低于设定值,若是,则计算初始力矩。
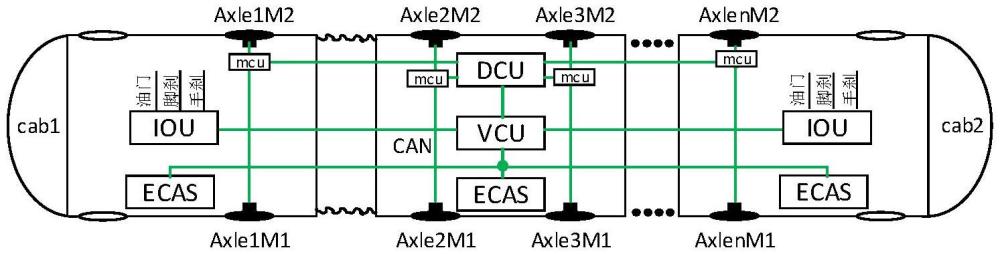
21、作为一个发明构思,本发明还提供了一种多编组胶轮电动列车,包括多节车,其中第一节车和最后一节车的车轴为非驱动轴,其余车轴均为驱动轴;所述驱动轴的力矩根据上述方法的步骤确定。
22、作为一个发明构思,本发明还提供了一种多编组胶轮电动列车坡道防溜控制系统,包括存储器和处理器;所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,实现上述方法的步骤。
23、与现有技术相比,本发明所具有的有益效果为:本发明能够通过电机反馈力矩与瞬时加速度计算值预测坡度启动力矩,列车无需坡道传感器,降低防溜坡功能的实现成本;分布式驱动列车,通过对控制电机的组队及力矩轮询控制减少了电机的堵转时间,优化了电机温升,提高了电机的使用寿命。防溜坡过程力矩的实时监控,确定最小的启动力矩,确定防溜坡退出时机。电机的启动防溜策略与失控控制策略提升了系统的安全性。
技术特征:1.一种多编组胶轮电动列车坡道防溜控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的多编组胶轮电动列车坡道防溜控制方法,其特征在于,启动列车时,t时刻的电机反馈力矩最小值fstart(t)计算公式为:
3.根据权利要求1所述的多编组胶轮电动列车坡道防溜控制方法,其特征在于,还包括:
4.根据权利要求3所述的多编组胶轮电动列车坡道防溜控制方法,其特征在于,将车轴按照两个一组的方式分为多组,将电机反馈力矩平均分配至各组;组内力矩的计算公式为:
5.根据权利要求3所述的多编组胶轮电动列车坡道防溜控制方法,其特征在于,一组车轴中,当力矩较大的车轴的温度在单位时间内上升超过设定度数,或者力矩较大的车轴维持较大力矩持续时间超过设定值时,减小该力矩较大车轴的力矩。
6.根据权利要求1所述的多编组胶轮电动列车坡道防溜控制方法,其特征在于,所述初始力矩的计算之前,进行包括如下步骤的操作:
7.一种多编组胶轮电动列车,其特征在于,包括多节车,其中第一节车和最后一节车的车轴为非驱动轴,其余车轴均为驱动轴;所述驱动轴的力矩根据权利要求1~6之一所述方法的步骤确定。
8.一种多编组胶轮电动列车坡道防溜控制系统,其特征在于,包括存储器和处理器;所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,实现权利要求1~6之一所述方法的步骤。
技术总结本发明公开了一种多编组胶轮电动列车坡道防溜控制方法及系统,通过电机反馈力矩与瞬时加速度计算值预测坡度启动力矩,列车无需坡道传感器,降低防溜坡功能的实现成本;分布式驱动列车,通过对控制电机的组队及力矩轮询控制减少了电机的堵转时间,优化了电机温升,提高了电机的使用寿命。防溜坡过程力矩的实时监控,确定最小的启动力矩,确定防溜坡退出时机。电机的启动防溜策略与失控控制策略提升了系统的安全性。技术研发人员:陈勇,杜求茂,刘宏达,皮凯俊,胡丰受保护的技术使用者:中车株洲电力机车有限公司技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/322679.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表