一种变结构自储能电动自行轮快速换装系统及其控制方法
- 国知局
- 2024-11-06 14:26:03
本发明涉及智能电动汽车控制,更具体的是,本发明涉及一种变结构自储能电动自行轮快速换装系统及其控制方法。
背景技术:
1、基于对消费者需求的洞察,中国汽车产业正在向着电动化、智能化和网联化(简称“三化”)快速发展,线控底盘技术作为智能化和电动化两个赛道的交汇点以及支撑实现智能电动汽车辅助驾驶和自动驾驶的关键基础技术,通过操控信息经过传感器转变为电信号,最终通过电路快速高效传输至执行机构,提升整个车身对于获知操控决策后的动态执行效率,具有安全、响应快、维护费用低、安装测试简单快捷的优点。线控底盘通过控制器、电源线、信号线和电机等电气部件对汽车进行操控,一旦电能不足或电气零部件出现故障,整个线控系统将失去控制,出现严重安全隐患。
2、自行轮系统作为底盘驱动的核心部分,其模块化发展显得尤为重要。模块化设计不仅提高了系统的灵活性和可维护性,还促进了不同功能模块之间的协同工作,使整车性能得到全面提升。此外,模块化设计还有助于降低生产成本,缩短开发周期,从而满足市场对新车型快速上市的需求。
技术实现思路
1、本发明的目的是设计开发了一种变结构自储能电动自行轮快速换装系统,采用模块话设计,实现各个部件的快速更换或升级,提高系统的维护性和扩展性,并能实现远程监控和控制。
2、本发明还设计开发了一种变结构自储能电动自行轮快速换装系统的控制方法,采用自动储存能量管理策略,提高能量回收能力,结合换电管理功能,提高了换电效率。
3、本发明提供的技术方案为:
4、一种变结构自储能电动自行轮快速换装系统,包括:
5、动力源,其输入端与外部电源相连接;以及
6、网络通信模块,其设置在电动自行轮系统内,且所述网络通信模块与客户端或服务器端通信,用于数据的交换和传输;
7、传感器模块,其分布在所述电动自行轮系统内,用于监测所述电动自行轮系统的状态;
8、外接装置,其设置在所述电动自行轮系统和车辆上,且所述外接装置与网络通信模块相连接,用于所述电动自行轮系统与车辆可选择的卡合或脱离;
9、综合自检装置,其设置在电动自行轮系统内,用于监测所述动力源、网络通信模块、传感器模块和外界装置的工作状态;
10、中央处理单元,其设置在所述电动自行轮系统内,且所述中央处理单元与车内多个子系统、网络通信模块、传感器模块、综合自检装置相连接,用于数据的接收和命令的下达;
11、存储器,其与所述中央处理单元相连接,用于数据和程序的存储及读取操作;
12、其中,所述网络通信模块、传感器模块、外接装置、综合自检装置、中央处理单元和存储器均与所述动力源的输出端相连接,所述动力源与所述网络通信模块相连接。
13、优选的是,所述动力源包括:
14、充电接口,其可选择的与外部电源相连接;
15、电源模块,其输入端与充电接口相连接,输出端与网络通信模块、传感器模块、外接装置、综合自检装置、中央处理单元和存储器相连接;
16、电机模块,其输入端与电源模块相连接,输出端与轮胎相连接,且所述电机模块与网络通信模块相连接,用于驱动所述电动自行轮系统的行走或转向。
17、优选的是,所述电源模块包括:
18、电池组,其输入端与所述充电接口相连接;
19、直流-直流转换器,其输入端与所述电池组的输出端相连接,输出端与网络通信模块、传感器模块、外接装置、综合自检装置、中央处理单元和存储器相连接;
20、所述电机模块包括:
21、驱动电机,其设置在所述电动自行轮系统内,且所述驱动电机的输出端与轮胎相连接,用于可选择的驱动所述电动自行轮系统行驶或制动;
22、转向电机,其设置在所述电动自行轮系统内,且所述转向电机的输出端与转向臂相连接,用于带动所述电动自行轮系统转向;
23、电机控制器,其与所述网络通信模块、驱动电机和转向电机相连接,用于驱动电机和转向电机的调节;
24、温度传感器,其设置在所述驱动电机内,且所述温度传感器与电机控制器相连接;
25、转速传感器,其设置在所述驱动电机的输出端,且所述转速传感器与所述电机控制器相连接;
26、其中,所述驱动电机、转向电机、电机控制器、温度传感器和转速传感器均与直流-直流转换器的输出端相连接。
27、优选的是,所述传感器模块包括:
28、位置传感器,其设置在所述电动自行轮系统上,用于监测所述电动自行轮系统的实时位置;
29、速度传感器,其设置在自行轮轮轴上,用于监测所述电动自行轮系统的实时速度;
30、图像传感器,其设置在所述电动自行轮系统上,用于障碍物检测;
31、加速踏板位置传感器,其设置在车辆内加速踏板下方或内部,用于检测加速踏板的倾斜角度或位移量;
32、制动踏板位置传感器,其设置在车辆内制动踏板下方或内部,用于检测制动踏板的倾斜角度或位移量;
33、超声波雷达,其设置在所述电动自行轮系统上,用于辅助障碍物检测;传感器信号处理控制器,其与所述位置传感器、速度传感器、图像传感器、加速踏板位置传感器、制动踏板位置传感器和超声波雷达相连接,且所述传感器信号处理控制器与中央处理单元相连接;
34、其中,所述位置传感器、速度传感器、图像传感器、加速踏板位置传感器、制动踏板位置传感器、超声波雷达和传感器信号处理控制器均与直流-直流转换器的输出端相连接。
35、优选的是,所述外接装置包括:
36、定位孔,其设置在车体上;
37、牵引杆,其设置在对应所述定位孔的电动自行轮系统上,且所述牵引杆与直流-直流转换器的输出端相连接,用于与所述定位孔可选择的卡合或脱离;
38、牵引杆控制器,其与所述牵引杆相连接,用于所述牵引杆的弹出或回缩;
39、接近传感器,其设置在所述定位孔中,且所述接近传感器与所述牵引杆控制器相连接,用于检测牵引杆与定位孔之间的卡合度;
40、其中,所述牵引杆、牵引杆控制器和接近传感器均与直流-直流转换器的输出端相连接。
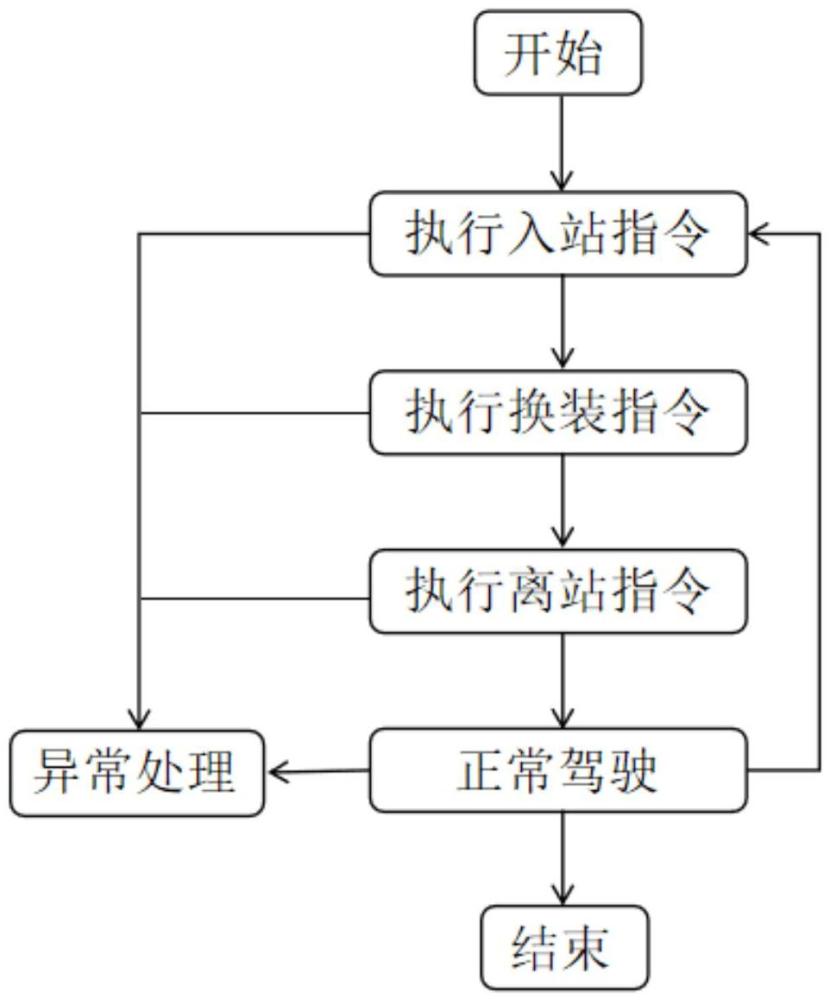
41、一种变结构自储能电动自行轮快速换装系统的控制方法,使用所述的变结构自储能电动自行轮快速换装系统,包括如下步骤:
42、步骤一、若客户端发出换装指令或综合自检装置检测到电动自行轮系统无电或故障警告,则服务器向网络通信模块向下发指令,启动入站程序;
43、步骤二、实时监测电动自行轮系统的道路障碍物信息和位置信息,若无异常,则启动换装程序;
44、步骤三、换装完成后,启动离站程序;
45、步骤四、车辆驶离换电站后,中央处理单元对电动自行轮系统按照驾驶员要求进行运动状态的控制,若中央处理单元接收到碰撞预警,则中央处理器立即执行安全措施、自检和上报客户端。
46、优选的是,所述入站程序包括如下步骤:
47、步骤1、当驾驶员启动入站指令时,中央处理单元将位置信息通过网络通信模块发送至服务器端,所述服务器端向距离最近的换电站发送信号,所述换电站检查是否有空位,若没有,则服务器端继续寻找下一距离近的换电站;若有,则所述服务器端反馈至客户端,并向电动自行轮系统提供前往所述换电站的路线,车辆前往所述换电站;
48、步骤2、车辆进入换电站时,开启对应的车道占用提示,车辆亮起停靠指示灯,服务器端对该车道进行占用标注;
49、步骤3、位置传感器检测车辆是否入位,若以入位,则取消车道占用并关闭车辆停靠指示灯;
50、步骤4、锁定车辆位置与状态,通过综合自检装置进行车辆综合自检,将自检信息在中央处理单元中与安全范围比较,若自检信息在安全范围内,则发送至客户端与服务端,等待用户进一步操作,选择启动换装程序或者离站程序。
51、优选的是,所述换装程序包括:
52、步骤ⅰ、客户端向服务器端传递换装指令,所述服务器端通过网络通信模块将指令反馈至中央处理单元,所述中央处理单元调取数据存储器中的车辆信息并对车辆的路径进行规划,所述中央处理单元实时监测电动自行轮系统的状态并对客户端和服务器端的信息进行更新;
53、其中,所述网络通信模块对换装指令进行有效性验证,所述中央处理单元对电动自行轮系统的安全因素进行评估;
54、步骤ⅱ、综合自检装置实时监测电动自行轮系统的健康状况并反馈至中央处理单元,若自检信息均在安全范围内,则牵引杆控制器断开牵引杆与车身的连接,所述中央控制单元将电动自行轮系统导航至目的换电站;
55、其中,所述中央控制单元结合电池电量对导航路径进行优化;
56、步骤ⅲ、所述中央处理单元调取程序存储器并运行故障诊断程序、电池管理程序、通信与数据交换程序和传感器数据采集与处理程序,实时反馈更新换下的电动自行轮系统的数据;
57、步骤ⅳ、位置传感器和图像传感器实时更新位置信息和道路障碍物信息,所述中央处理单元根据所述位置信息和道路障碍物信息调节电动自行轮系统的运动状态至到达目的换电站进行充电,新电动自行轮根据导航路径前往车辆停靠处,到达位置后牵引杆控制器控制新电动自行轮与车身对接;
58、步骤ⅴ、更换后的电动自行轮系统启动综合自检装置对其自身和车身进行检测,若无异常,则换装程序完成。
59、优选的是,所述离站程序包括如下步骤:
60、步骤a、车辆换装完成后,车轮进行解除锁定,车辆恢复可行驶状态;
61、步骤b、换电站亮出可出站灯光,使用者应用程序收到换电站离站提示,驾驶员驾驶车辆驶出换电站;
62、步骤c、解除车道占用,所占用车道进入空闲状态,等待下一台车辆进入。
63、优选的是,所述步骤四中中央处理单元对电动自行轮系统按照驾驶员要求进行运动状态的控制具体包括:
64、第一步、驾驶员操纵制动踏板、加速踏板和/或方向盘,网络通信模块连接中央控制单元,车控系统通过加速踏板位置传感器和制动踏板位置传感器得到的加速踏板倾角、制动踏板倾角信号发送指令,传达指令至中央处理单元;
65、第二步、中央处理单元根据加速踏板倾角和制动踏板倾角判断制动、待机或加速:
66、当制动踏板产生倾角,则车辆处于制动状态,中央处理单元减少或切断动力输出;
67、当制动踏板或加速踏板均处于释放位置,则车辆处于待机状态,中央处理单元维持发动机怠速运转,进入能量回收模式或关闭动力系统;
68、当制动踏板未产生倾角且加速踏板产生倾角,则车辆处于加速状态,中央处理单元增加发动机的燃油供给或增加驱动电机的功率输出;
69、在行驶过程中车辆保持牵引杆与车身连接稳固;所有传感器持续反馈电动自行轮系统的数据,综合自检装置保持启动状态,若所有数据正常,则记录日志,更新电动自行轮行驶里程、电量状况和健康状况数据;若异常,网络通信模块上传异常信息至客户端及服务器端,等待用户手动停止车辆进行异常处理,若用户在十五分钟内未作出处理或无法处理,则对车辆进行规划,紧急停靠或采取其他应急措施。
70、本发明所述的有益效果:
71、(1)、本发明设计开发的一种变结构自储能电动自行轮快速换装系统,该控制系统采用模块化设计,使得系统能够快速地更换损坏的部件或升级系统,提高系统的维护性和扩展性;系统通过网络通信模块与客户端或服务器端进行通信,实现远程监控和控制功能。
72、(2)、本发明设计开发的变结构自储能电动自行轮快速换装系统的控制方法,结合变结构设计和自储能技术能够根据实际需求调整结构配置和能量管理策略,实现能量的高效利用,并且能够提高能量回收能力,具备智能换电管理功能,能够实时监测电池状态,当状态不佳时,系统会自动发出换电请求,并引导用户完成换电操作,提高了换电效率和用户体验,实现了快速换电和智能化管理,提高了智能电动汽车的充电便利性和智能电动汽车充电效率,采用更为合理的电控技术,可以有效解决现有充电方式存在的充电时间长、充电车位少的问题,为智能电动汽车的发展提供有力支持;结合地图数据和传感器数据,实现智能路径规划和导航功能。
本文地址:https://www.jishuxx.com/zhuanli/20241106/322054.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表