一种支持辅助泊车的智能车位系统及泊车方法与流程
- 国知局
- 2024-10-21 15:23:41
本发明涉及车位智能系统,尤其涉及一种支持辅助泊车的智能车位系统及泊车方法。
背景技术:
1、参照图1-3,为当前使用的车位主要是使用在地面上画线(白色油漆或黄色油漆)的方案,图1中为车位线均为较粗的实线;图2中车位线整体为较粗的实线,同时车位供车辆进入的一端为较细的实线;图3中车位线仅标记车位的四个角。
2、带自动泊车功能的车辆在进行泊车之前必须先能成功检到可进行泊车的车位。对于划线车位的探测识别方法,目前的车辆一般是利用安装在保险杠上的超声波雷达对外部障碍物进行感知探测,遇到障碍物进行长鸣报警,或通过倒车影像观察车辆后方情况和场景,对于无驾驶辅助配置的车辆则完全依赖驾驶员通过左右外后视镜镜面反射观察车外情况。
3、对于无驾驶辅助功能的车辆,传统的划线车位特征简单,可供参照物少,且存在脏污,掉漆,涂抹等情况,对驾驶员驾驶车辆泊车提供辅助不明显。对于大型商场,小区,办公楼等地下停车场,存在违规停车或停车不规范的情况,无法得到有效监督。而如果搭配高阶自动驾驶的车辆从车端入手,通过搭载高性能、高算力芯片对环境模型进行计算识别,单车成本压力过高。
4、对于传统的划线车位,传统的划线车位可供提取和感知元素单一,缺乏管理和统一维护,在使用过程中因无运维而被消耗;传统的划线车位限制车辆最终泊入的所处位置区间,但是在泊入过程中也仅仅能够提供区间范围内的感知提示,即车位线,当驾驶员泊入到车位内一定范围后,驾驶员有可能无法通过后视镜看到车位线信息。此外,传统的划线车位仅仅提供静态提示,无法提供动态提示;常规的驾驶辅助设备布置在车端,单车成本压力较大;传统的倒车入库需要驾驶员观察左右两边外后视镜情况。
5、对划线车位的探测方法,现有的技术方案和专利(基于视觉检测)存在明显缺点。如下场景可能无法检测到划线车位:
6、1、当车位线的大部分被脏污遮挡时,车载视觉感知可能无法识别识别到车位;
7、2、当车位线区域的的光线较暗时,车载视觉感知可能无法识别识别到车位;
8、3、当车位线油漆大面积脱落,车载视觉感知可能无法识别识别到车位;
9、4、基于视觉深度学习算法进行划线车位的检测存在一定概率的误检率。
技术实现思路
1、本发明要解决的技术问题是:为了解决现有技术中的技术问题,本发明提供一种支持辅助泊车的智能车位系统及泊车方法,使得驾驶员即便车辆没有驾驶辅助功能时,也能提供更多的泊车入位的感知元素和泊车入库方法。
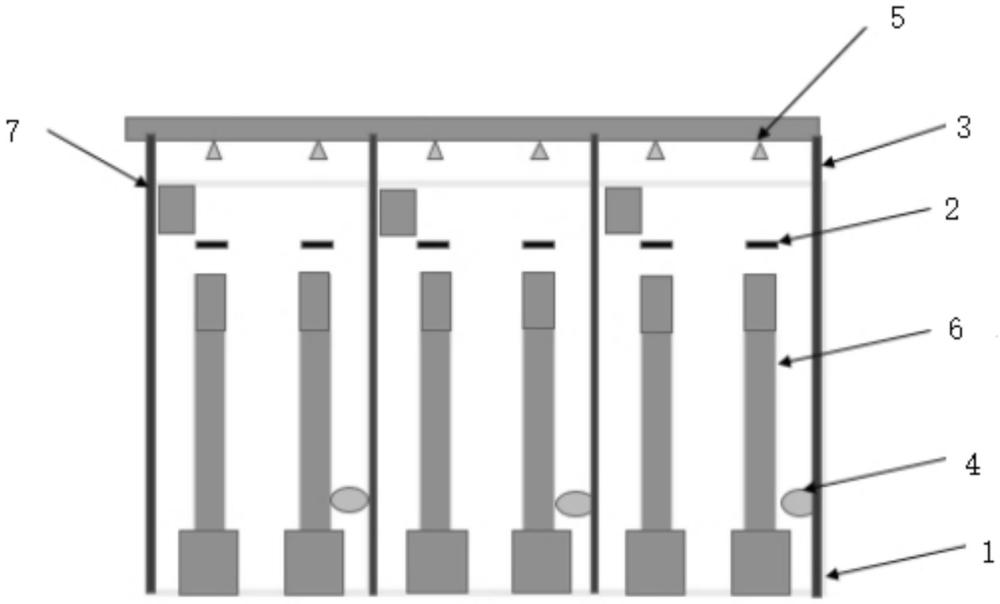
2、本发明解决其技术问题所采用的技术方案是:一种支持辅助泊车的智能车位系统,包括车位线;压力轮档,所述压力轮档上安装有压力传感器,用于与车辆车轮接触以确认车辆泊入到位;车位感应指示灯,用于通过光线指引驾驶员;车位蜂鸣器,用于通过声音提醒驾驶员;声波探测器,用于探测车辆泊入车位距离;车位感应传感器,设于车位线内,通过感测受到的压力以判断车辆相对本车位的位置;车位感应控制器,与压力轮挡、车位感应传感器、车位感应指示灯、车位蜂鸣器和声波探测器电连接,通过压力轮挡、声波探测器和车辆感应传感器来获取车辆位置信息,得出车位所处位置,并控制车位蜂鸣器和车位感应指示灯发出指示,以示意驾驶员根据指示做出调整。
3、本发明的一种支持辅助泊车的智能车位系统,工作时,通过车位感应传感器感应判断车辆位姿,通过声波探测器判断车辆泊车进度,通过车位蜂鸣器和车位感应指示灯给驾驶员声光提醒,改变驾驶员驾驶习惯,在本系统的辅助下,驾驶员可近依赖单边外后视镜观察车位感应指示灯和车位蜂鸣器即可实现泊车入位,提升泊车入位的便捷性和精确性。
4、进一步,还包括智能电池,所述智能电池与压力轮挡、车位感应传感器、车位感应指示灯、车位蜂鸣器、车位感应控制器和声波探测器均电连接,所述智能电池设于车位线内,用于将车位内车辆的重力势能转换为电能,并储存电能或将电能供应给压力轮挡、车位感应传感器、车位感应指示灯、车位蜂鸣器、车位感应控制器和声波探测器。
5、进一步,所述车位感应指示灯沿车位线的边框安装,所述车位感应指示灯能够调节亮度,并能够产生流水效果。
6、进一步,所述车位蜂鸣器具备语音模式和蜂鸣模式,所述车位蜂鸣器在语音模式下通过不同语音提示驾驶员当前车位相对于车位的位姿状态,所述车位蜂鸣器在蜂鸣模式下通过不同频率的的蜂鸣提示驾驶员距离后方障碍物距离。
7、进一步,所述声波探测器设于车位线远离车辆进入方向的一侧,所述声波探测器具备长距模式和短距模式,所述声波探测器在长距模式下能够探测远端障碍物的距离,所述声波探测器在短距模式下能够探测近端障碍物的距离。
8、进一步,所述车位传感器包括第一感应区、第二感应区、第三感应区、第四感应区、第五感应区和第六感应区,所述第一感应区、第二感应区、第三感应区、第四感应区、第五感应区和第六感应区能够单独感应压力。
9、进一步,所述智能电池上设有压电材料制成的压电片,以将重力势能转化为电能,所述智能电池作为地砖安装于车位线内。
10、进一步,所述车位线内无车辆时,所述智能电池为车位感应传感器和车位感应控制器供电;所述车位线内有车辆时,所述智能电池为声波探测器、压力轮档、感应指示灯以及车位蜂鸣器供电;所述压力轮档上的压力传感器检测到压力时,所述智能电池停止为声波探测器、压力轮档、感应指示灯以及车位蜂鸣器供电。
11、进一步,所述车位感应传感器、车位感应指示灯、车位蜂鸣器、车位感应控制器均通过透明钢化玻璃板进行保护。
12、进一步,一种泊车方法,基于上述的支持辅助泊车的智能车位系统,包括如下步骤:
13、s1、车位线内无车辆,系统处于休眠状态,仅保留车位感应控制器和车位感应传感器的供电,此时所消耗电能为系统自身智能电池的电能,所述压力轮档、车位感应指示灯、车位蜂鸣器、声波探测器等电器件均不进行供电;
14、s2、驾驶员驾驶车辆找到目标车位,开始进入泊车入位,当第一感应区或第二感应区检测到压力值≥2000n,且该车位线内其他感应区未检测到压力≥2000n时,系统唤醒开始工作,所述智能电池为压力轮档、车位感应指示灯、车位蜂鸣器、声波探测器供电,此时车位感应指示灯高亮显示,亮度为20%,但并无流水效果,声波探测器以长距模式开始工作,车位蜂鸣器保持蜂鸣模式;
15、s3、车辆后车身进入到车位内后,当第三感应区和第四感应区均检测到压力值≥2000n,且第一感应区和第二感应区并未检测到压力值≥2000n时,此时声波探测器保持长距模式,车位蜂鸣器保持蜂鸣模式,实时提醒驾驶员泊车进度,此时车位感应指示灯高亮显示,亮度调节为40%,且展示为流水效果;
16、s4、车辆全车身进入到车位内后,当第一感应区、第二感应区、第三感应区、第四感应区均检测到压力值≥2000n时,此时声波探测器保持长距模式,车位蜂鸣器保持蜂鸣模式,实时提醒驾驶员泊车进度,此时车位感应指示灯高亮显示,亮度调节为60%,且展示为流水效果;
17、s5、车辆全车身入库后,当第三感应区、第四感应区、第五感应区、第六感应区均检测到压力值≥2000n,,此时声波探测器保持短距模式,车位蜂鸣器保持蜂鸣模式,实时提醒驾驶员泊车进度,此时车位感应指示灯高亮显示,亮度调节为80%,且展示为流水效果;
18、s6、车辆入库泊入到指定位置,当第三感应区、第四感应区均检测到压力值≥2000n,且压力轮档检测到压力≥300n,车位蜂鸣器转换为语音模式提醒驾驶员车辆已泊车入位,随后车位蜂鸣器关闭,同时声波探测器关闭,此时车位感应指示灯高亮显示,亮度调节为100%,维持5-15秒钟后完全熄灭,此后只能电池停止对声波探测器、车位感应指示灯、压力轮档、车位蜂鸣器的供电,转而启动智能电池,智能电池开始充电。
19、本发明的有益效果是,
20、1、工作时,通过车位感应传感器感应判断车辆位姿,通过声波探测器判断车辆泊车进度,通过车位蜂鸣器和车位感应指示灯给驾驶员声光提醒,改变驾驶员驾驶习惯,在本系统的辅助下,驾驶员可近依赖单边外后视镜观察车位感应指示灯和车位蜂鸣器即可实现泊车入位,提升泊车入位的便捷性和精确性;
21、2、通过压电材料制成的压电片将车辆重力势能转化为电能,并通过智能电池实现储电,进而用于本系统的供电,实现自给自足。
本文地址:https://www.jishuxx.com/zhuanli/20241021/321413.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表