一种挂车姿态检测方法及系统与流程
- 国知局
- 2024-10-21 15:18:08
本发明涉及车辆姿态检测,尤其涉及一种挂车姿态检测方法及系统。
背景技术:
1、挂车侧翻风险主要指在运输过程中,由于转弯速度过快、货物装载不当、路面条件恶劣、车辆自身稳定性不足或遭遇突发状况等原因,导致挂车发生横向倾斜,超出其稳定极限而引发的翻车危险。这种现象不仅会严重损坏货物和车辆,还可能危及驾驶员及道路其他使用者的安全,造成交通堵塞和重大的经济损失。
2、现有的预防挂车侧翻主要还是依靠驾驶员自身进行判断,这样主观性太强可靠程度较低。
技术实现思路
1、本发明的目的在于提供一种挂车姿态检测方法及系统,旨在可以使得对挂车的运行姿态进行检测,并给出行驶建议,能够为驾驶员提供实时、准确的数据支持,帮助他们在复杂路况下更好地控制挂车,降低交通事故的风险。
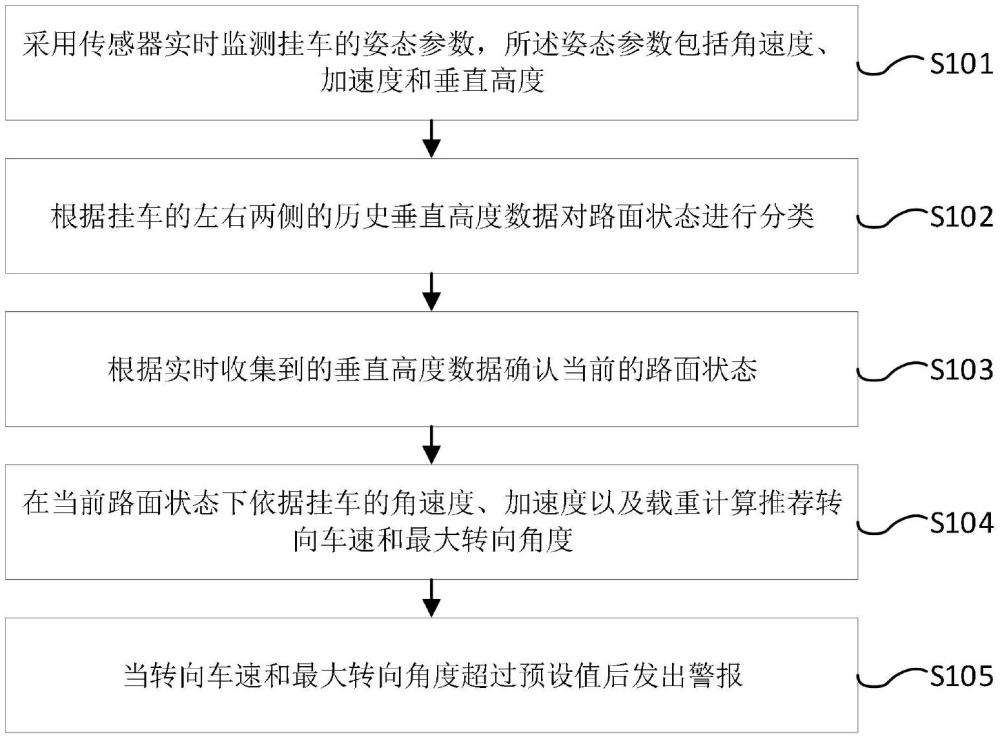
2、为实现上述目的,第一方面,本发明提供了一种挂车姿态检测方法,包括采用传感器实时监测挂车的姿态参数,所述姿态参数包括角速度、加速度和垂直高度;
3、根据挂车的左右两侧的历史垂直高度数据对路面状态进行分类;
4、根据实时收集到的垂直高度数据确认当前的路面状态;
5、在当前路面状态下依据挂车的角速度、加速度以及载重计算推荐转向车速和最大转向角度;
6、当转向车速和最大转向角度超过预设值后发出警报。
7、其中,所述采用传感器实时监测挂车的姿态参数的具体步骤包括:
8、根据监测需求选择对应的传感器组;
9、按照设计布局将传感器组固定于挂车相应位置;
10、将所有传感器通过无线方式连接至中央处理单元并对传感器进行校准;
11、采用传感器组采集挂车的姿态参数。
12、其中,所述根据挂车的左右两侧的历史垂直高度数据对路面状态进行分类的具体步骤包括:
13、对历史垂直高度数据采用路面标签进行标注,所述路面标签包括平坦、坑洼、坡度;
14、从标注的历史垂直高度数据中提取分类特征,所述分类特征包括左右两侧高度的差值、平均高度、标准差、偏度;
15、将标注后的数据集分成训练集和验证集;
16、使用训练集对线性支持向量机模型进行训练,得到路面判断模型。
17、其中,所述根据实时收集到的垂直高度数据确认当前的路面状态的具体步骤包括:
18、获取传感器收集到的垂直高度数据;
19、对垂直高度数据进行预处理;
20、将路面判断模型应用于实时采集的数据,对当前的路面状态进行识别。
21、其中,所述对垂直高度数据进行预处理的具体步骤包括:
22、检查垂直高度数据中是否存在异常高度值,若存在则删除异常高度值;
23、如果垂直高度数据中存在缺失值,则使用插值法进行填充。
24、其中,所述在当前路面状态下依据挂车的角速度、加速度以及载重计算推荐转向车速和最大转向角度的具体步骤包括:
25、根据挂车的角速度、加速度和载重以及路面状态设置动力学模型;
26、通过动力学模型计算在当前路面状况下,挂车能够安全转向的车速;
27、基于安全转向车速计算对应的安全转向角度。
28、其中,所述根据挂车的角速度、加速度和载重以及路面状态设置动力学模型的具体步骤包括:
29、定义基本参数和坐标系;
30、基于角速度、加速度和载重以及路面状态建立动力学方程;
31、通过旋转动力学方程来修正x轴和y轴上的加速度。
32、第二方面,本发明还提供一种挂车姿态检测系统,包括参数获取模块、路面分类模块、路面检测模块、速度计算模块和警报模块;
33、所述参数获取模块,用于采用传感器实时监测挂车的姿态参数,所述姿态参数包括角速度、加速度和垂直高度;
34、所述路面分类模块,用于根据挂车的左右两侧的历史垂直高度数据对路面状态进行分类;
35、所述路面检测模块,用于根据实时收集到的垂直高度数据确认当前的路面状态;
36、所述速度计算模块,用于在当前路面状态下依据挂车的角速度、加速度以及载重计算推荐转向车速和最大转向角度;
37、所述警报模块,用于当转向车速和最大转向角度超过预设值后发出警报。
38、本发明的一种挂车姿态检测方法及系统,采用高精度传感器实时监测挂车的姿态参数。这些姿态参数主要包括挂车的角速度、加速度以及垂直高度。角速度用于测量挂车围绕其轴旋转的速度,加速度用于测量挂车的加速情况,而垂直高度则用于监测挂车与地面之间的距离变化。收集并分析挂车左右两侧的历史垂直高度数据,以此来对路面状态进行分类。通过这种方法,可以识别出路面的不同状况,如平坦路面、坡度路面或崎岖路面等。根据实时收集到的垂直高度数据,进一步确认当前的路面状态。结合历史数据和实时数据,可以更准确地判断路况,并提供相应的驾驶建议。在确认当前路面状态的基础上,依据挂车的角速度、加速度以及载重情况,计算出推荐转向车速和最大转向角度。这些参数对于确保挂车安全行驶至关重要。推荐转向车速可以帮助驾驶员了解在当前路况下,挂车能够安全行驶的最高速度。而最大转向角度则有助于驾驶员在转弯时避免过度转向,导致挂车失控。实时监控转向车速和最大转向角度,一旦它们的值超过预设的安全阈值,系统将立即发出警报。这样,驾驶员可以及时采取措施,确保挂车的安全行驶。通过这种方法,挂车姿态检测系统能够为驾驶员提供实时、准确的数据支持,帮助他们在复杂路况下更好地控制挂车,降低交通事故的风险。
技术特征:1.一种挂车姿态检测方法,其特征在于,
2.如权利要求1所述的一种挂车姿态检测方法,其特征在于,
3.如权利要求2所述的一种挂车姿态检测方法,其特征在于,
4.如权利要求3所述的一种挂车姿态检测方法,其特征在于,
5.如权利要求4所述的一种挂车姿态检测方法,其特征在于,
6.如权利要求5所述的一种挂车姿态检测方法,其特征在于,
7.如权利要求6所述的一种挂车姿态检测方法,其特征在于,
8.一种挂车姿态检测系统,其特征在于,
技术总结本发明涉及车辆姿态检测技术领域,具体涉及一种挂车姿态检测方法及系统,包括:采用传感器实时监测挂车的姿态参数,所述姿态参数包括角速度、加速度和垂直高度;根据挂车的左右两侧的历史垂直高度数据对路面状态进行分类;根据实时收集到的垂直高度数据确认当前的路面状态;在当前路面状态下依据挂车的角速度、加速度以及载重计算推荐转向车速和最大转向角度;当转向车速和最大转向角度超过预设值后发出警报。从而使得挂车姿态检测系统能够为驾驶员提供实时、准确的数据支持,帮助他们在复杂路况下更好地控制挂车,降低交通事故的风险。技术研发人员:郭元峰,丁建云,郭本福,张以祥,王志同受保护的技术使用者:山东富源专用汽车制造股份有限公司技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/321141.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表