一种机床柔性移动工作站及其工作方法与流程
- 国知局
- 2024-10-21 15:23:29
本发明涉及自动化工作站,特别涉及一种机床柔性移动工作站及其工作方法。
背景技术:
1、机加工,通常指机床对金属零部件进行车、铣、磨等加工作业。在现有的机加工过程中,待加工工件的送料方式主要有两种,一种方式是在机床内加装料仓,再由机械手将待加工的工件装夹在机床的夹具处,此种方式需要在机床内加装料仓、机械手,涉及机床台板的加工改造,对于通用型机床的改造难度较大,并且大部分机加工工件大多呈小批量多品种的产品特性,每当涉及不同品种都需要对机床进行相应改造,成本高昂;
2、另一种方式是由工人将装载有待加工工件的运输推车推移至机床旁,并通过手动上料的方式将待加工工件手动装夹在机床的夹具处,待工件加工完毕后再手动将工件从机床的夹具处取下并放回运输推车内,此种方式无需对机床进行改造,灵活性较高,但是较为依赖人工手动进行精准上下料。
3、随着技术的发展,一种适用于机床上下料的机器人工作站目前已被开发出。授权公告号为cn217143938u的中国发明专利公开了一种机器人机床上下料工作站,其包括有独立设置于机床外的工作台,工作台处设有用于上下料的机器人(又称机械手),机器人能自动将工作台处待加工的工件自动取放到机床处进行机加工。该机器人机床上下料工作站虽然能够有效地实现零部件在机床处的自动上下料。但是,当机器人将机床处完成机加工的工件取放回工作台时,工人需要等待整批工件均完成机器人取放后,才可手动将工作台处完成机加工的工件取下并换上待加工的工件,否则会出现人机碰撞的危险情况,导致人身安全事故。另外,该机器人机床上下料工作站无法在具体的生产应用中如何适用于不同的机床,无法实现工作站在不同机床之间的切换使用。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种机床柔性移动工作站及其工作方法。
2、为实现上述目的,本发明采用如下的技术方案:
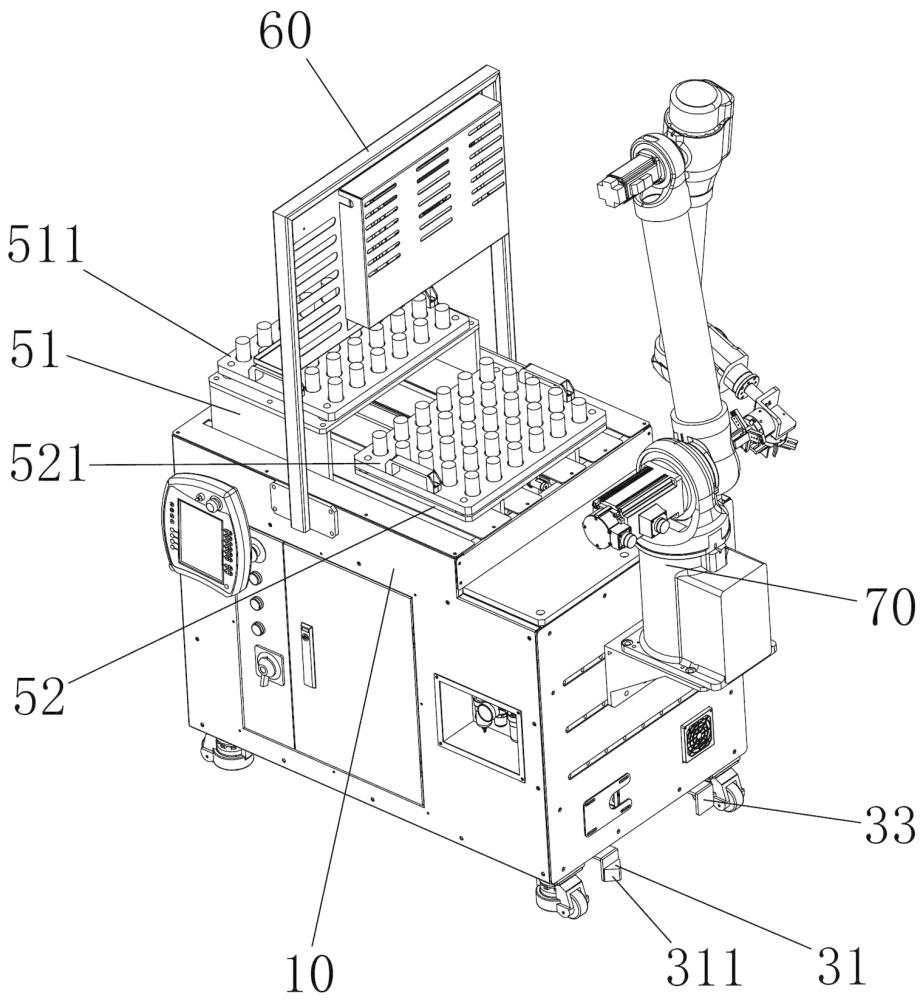
3、一种机床柔性移动工作站,包括有可移动的工作台,所述工作台的前侧安装设置有机器人,所述工作台的后侧设有控制面板,所述工作台的上侧设有用承载待加工工件的料盘组件,所述工作台的下侧设有对接定位机构,所述对接定位机构至少配设一用于固定安装在机床处的对接定位组件;
4、对接定位机构包括有第一定位块、升降定位栓,所述第一定位块处设有呈v型的横向凸起部;所述对接定位组件包括有定位架,所述定位架处设有开设v型槽口的第二定位块,所述定位架处设有用于与机床柔性移动工作站对接的对接臂,所述对接臂处开设有定位孔;当机床柔性移动工作站与机床对接时,所述第一定位块的所述横向凸起部对应插入所述第二定位块的v型槽口,所述升降定位栓下降插入所述对接臂的所述定位孔。
5、进一步阐述,所述料盘组件包括有可交替移动设置的第一运料架、第二运料架,所述第一运料架与所述第二运料架处分别设有可拆卸的第一料盘、第二料盘,所述第一运料架设于第二运料架的上方,所述工作台内设有用于驱动所述第一运料架与所述第二运料架交替移动的平移驱动机构。
6、进一步阐述,所述平移驱动机构包括有平移驱动器件、传动带组,所述传动带组包括有同步带,所述第一运料架夹住所述同步带的一侧带段,所述第二运料架夹住所述同步带的另一侧带段,所述平移驱动器件的输出端与所述第二运料架相连接,当所述平移驱动器件驱动所述第二运料架平移时,所述第二运料架带动所述同步带运行,所述同步带带动所述第一运料架向相反方向平移。
7、进一步阐述,所述第一运料架与所述第二运料架的交界处架设有空间分隔板,所述控制面板安装于所述空间分隔板处。
8、进一步阐述,所述机器人的臂端旋转轴处设有切换座,所述切换座处设有用于夹取工件的第一夹爪、第二夹爪。
9、一种机床柔性移动工作站的工作方法,基于上述的机床柔性移动工作站,包括有以下步骤:
10、s1、在加工现场处的各个机床处安装设置所述对接定位组件;
11、s2、根据加工现场的使用需求,将载有待加工工件的机床柔性移动工作站推送至指定的一机床处,机床柔性移动工作站的对接定位机构与机床的对接定位组件进行对接,第一定位块的横向凸起部对应插入第二定位块的v型槽口,升降定位栓下降插入对接臂的定位孔;
12、s3、机器人从第二运料架处夹取待加工工件并装夹在机床的夹具处,待工件完成机加工后再放回第二运料架;
13、当第二运料架处的待加工工件均完成机加工后,平移驱动机构带动第二运料架运行,第一运料架与第二运料架交替对移,第二运料架移动至空间分隔板的后侧,第一运料架移动至空间分隔板的前侧;
14、s4、工人将第二运料架处完成机加工的工件取下并换上待加工的工件,同时机器人从第一运料架处夹取待加工工件并装夹在机床的夹具处,待工件完成机加工后再放回第一运料架;
15、当第一运料架处的待加工工件均完成机加工后,平移驱动机构带动第一运料架运行,第一运料架与第二运料架交替对移,第一运料架移动至空间分隔板的后侧,第二运料架移动至空间分隔板的前侧,并循环重复步骤s3;
16、s5、在完成整批工件的机加工后,断开机床柔性移动工作站与机床之间的对接,升降定位栓上升并从对接臂的定位孔处抽出,并循环重复步骤s2。
17、具体地,在步骤s3中,机器人的第一夹爪从第二运料架处夹取待加工工件,当机床处的工件完成机加工后,机器人的第二夹爪将机床完成机加工的工件取下,第一夹爪夹取待加工工件装夹在机床的夹具处。
18、本发明的有益效果在于:本发明采用对接定位机构与固定安装在机床处的对接定位组件相对接的方式,通过在各机床处安装对接定位组件,使机床柔性移动工作站可适用各个机床,可在不同机床之间的切换使用,具有广泛的通用性;
19、另外,本发明采用第一运料架与第二运料架相互交替的结构设计,工人可跟机器人同时作业,在机器人从机床处取下完成机加工的工件并放在第一运料架的同时,工人可在第二运料架处换上待加工的工件,设置在第一运料架与第二运料架之间的空间分隔板能够起到避免发生人机碰撞的人身安全事故。
技术特征:1.一种机床柔性移动工作站,包括有可移动的工作台(10),所述工作台(10)的前侧安装设置有机器人(70),所述工作台(10)的后侧设有控制面板(20),其特征在于:所述工作台(10)的上侧设有用承载待加工工件的料盘组件,所述工作台(10)的下侧设有对接定位机构,所述对接定位机构至少配设一用于固定安装在机床处的对接定位组件(40);
2.根据权利要求1所述的机床柔性移动工作站,其特征在于:所述料盘组件包括有可交替移动设置的第一运料架(51)、第二运料架(52),所述第一运料架(51)与所述第二运料架(52)处分别设有可拆卸的第一料盘(511)、第二料盘(521),所述第一运料架(51)设于第二运料架(52)的上方,所述工作台(10)内设有用于驱动所述第一运料架(51)与所述第二运料架(52)交替移动的平移驱动机构(53)。
3.根据权利要求2所述的机床柔性移动工作站,其特征在于:所述平移驱动机构(53)包括有平移驱动器件(531)、传动带组,所述传动带组包括有同步带(532),所述第一运料架(51)夹住所述同步带(532)的一侧带段,所述第二运料架(52)夹住所述同步带(532)的另一侧带段,所述平移驱动器件(531)的输出端与所述第二运料架(52)相连接,当所述平移驱动器件(531)驱动所述第二运料架(52)平移时,所述第二运料架(52)带动所述同步带(532)运行,所述同步带(532)带动所述第一运料架(51)向相反方向平移。
4.根据权利要求3所述的机床柔性移动工作站,其特征在于:所述第一运料架(51)与所述第二运料架(52)的交界处架设有空间分隔板(60),所述控制面板(20)安装于所述空间分隔板(60)处。
5.根据权利要求4所述的机床柔性移动工作站,其特征在于:所述机器人(70)的臂端旋转轴(71)处设有切换座(72),所述切换座(72)处设有用于夹取工件的第一夹爪(73)、第二夹爪(74)。
6.一种机床柔性移动工作站的工作方法,其特征在于:基于上述权利要求5所述的机床柔性移动工作站,包括有以下步骤:
7.根据权利要求6所述的工作方法,其特征在于:在步骤s3中,机器人(70)的第一夹爪(73)从第二运料架(52)处夹取待加工工件,当机床处的工件完成机加工后,机器人(70)的第二夹爪(74)将机床(80)完成机加工的工件取下,第一夹爪(73)夹取待加工工件装夹在机床(80)的夹具处。
技术总结本发明公开了一种机床柔性移动工作站及其工作方法,包括有可移动的工作台,工作台的前侧安装设置有机器人,工作台的后侧设有控制面板,工作台的上侧设有用承载待加工工件的料盘组件,工作台的下侧设有对接定位机构,对接定位机构至少配设一用于固定安装在机床处的对接定位组件;对接定位机构包括有第一定位块、升降定位栓,第一定位块处设有呈V型的横向凸起部;对接定位组件包括有定位架,定位架处设有开设V型槽口的第二定位块,定位架处设有用于与机床柔性移动工作站对接的对接臂,对接臂处开设有定位孔。本发明通过在各机床处安装对接定位组件,使机床柔性移动工作站可在不同机床之间的切换使用,具有广泛的通用性。技术研发人员:李向昆,林启政,易子杰,杨林,林任志受保护的技术使用者:佛山华数机器人有限公司技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/321405.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表