一种机器人免示教坡口切割系统的制作方法
- 国知局
- 2024-11-12 14:04:07
本技术涉及切割设备领域,尤其涉及一种机器人免示教坡口切割系统。
背景技术:
1、现有技术中,坡口切割大多采用人工方式,既浪费资源又不能够提高效率,产品质量也差,少数采用机器人自动化的切割方式,但由于异形工件及限位精度问题,导致工作量大,精度也无法保证,特别是小批量多品种的工件,切割精度与效率不能满足需求。
技术实现思路
1、为了解决上述技术问题,本实用新型提供一种机器人免示教坡口切割系统,以提高切割精度与效率,其技术方案如下:
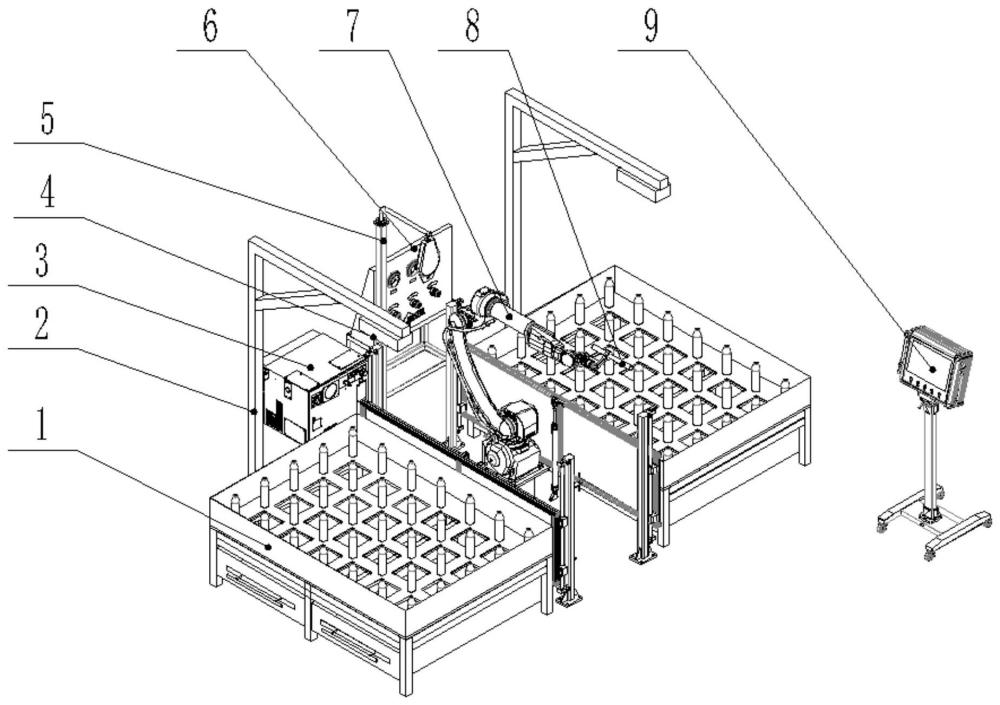
2、本实用新型提供一种机器人免示教坡口切割系统,其包括切割平台、视觉支撑架、机器人控制柜、视觉传感器、气源箱、切割机器人、割枪和智能切割控制器,所述切割平台上表面间隔设有等高柱,所述视觉支撑架一端固定在地面上,所述视觉支撑架另一端连接所述视觉传感器,所述视觉传感器位于所述切割平台上方,所述机器人控制柜连接所述切割机器人,所述切割机器人夹持所述割枪,所述气源箱连通所述割枪内部管路,所述切割平台位于所述切割机器人工作范围内,所述智能切割控制器数据连接所述视觉传感器和所述机器人控制柜。
3、进一步地,所述机器人控制柜通过切割管线连接所述切割机器人。
4、进一步地,还包括吊线架,所述吊线架位于所述机器人控制柜和所述切割机器人之间,所述吊线架呈l型,所述吊线架一端固定在地面上,所述吊线架另一端悬挂所述切割管线。
5、进一步地,所述吊线架弯折处设有加强筋。
6、进一步地,所述切割平台上表面设有排气挡板,所述排气挡板包围所述等高柱,所述排气挡板上设有排气孔,所述等高柱高度大于或等于所述排期气挡板高度。
7、进一步地,所述排期挡板上对应所述排气孔设有排气扇。
8、进一步地,所述切割平台呈立方体状。
9、进一步地,所述视觉支撑架呈l型。
10、进一步地,所述视觉支撑架弯折处设有加强筋。
11、进一步地,两个所述切割平台对称设置在所述切割机器人两侧,形成双工位。
12、进一步地,视觉传感器为粗精一体视觉传感器。
13、相较于现有技术,采用本实用新型的技术方案,其有益效果是:其通过视觉系统与智能切割系统的配合,利用切割机器人执行动作实现工件的切割,既免去了人工对机器人示教程序的麻烦,又提高了加工完成产品的精度与效率。
技术特征:1.一种机器人免示教坡口切割系统,其特征在于,包括切割平台(1)、视觉支撑架(2)、机器人控制柜(3)、视觉传感器(4)、气源箱(6)、切割机器人(7)、割枪(8)和智能切割控制器(9),所述切割平台(1)上表面间隔设有等高柱,所述视觉支撑架(2)一端固定在地面上,所述视觉支撑架(2)另一端连接所述视觉传感器(4),所述视觉传感器(4)位于所述切割平台(1)上方,所述机器人控制柜(3)连接所述切割机器人(7),所述切割机器人(7)夹持所述割枪(8),所述气源箱(6)连通所述割枪(8)内部管路,所述切割平台(1)位于所述切割机器人(7)工作范围内,所述智能切割控制器(9)数据连接所述视觉传感器(4)和所述机器人控制柜(3)。
2.根据权利要求1所述的一种机器人免示教坡口切割系统,其特征在于,所述机器人控制柜(3)通过切割管线连接所述切割机器人(7)。
3.根据权利要求2所述的一种机器人免示教坡口切割系统,其特征在于,还包括吊线架(5),所述吊线架(5)位于所述机器人控制柜(3)和所述切割机器人(7)之间,所述吊线架(5)呈l型,所述吊线架(5)一端固定在地面上,所述吊线架(5)另一端悬挂所述切割管线。
4.根据权利要求3所述的一种机器人免示教坡口切割系统,其特征在于,所述吊线架(5)弯折处设有加强筋。
5.根据权利要求1所述的一种机器人免示教坡口切割系统,其特征在于,所述切割平台(1)上表面设有排气挡板,所述排气挡板包围所述等高柱,所述排气挡板上设有排气孔,所述等高柱高度大于或等于所述排气挡板高度。
6.根据权利要求5所述的一种机器人免示教坡口切割系统,其特征在于,所述排气挡板上对应所述排气孔设有排气扇。
7.根据权利要求1所述的一种机器人免示教坡口切割系统,其特征在于,所述切割平台(1)呈立方体状。
8.根据权利要求1所述的一种机器人免示教坡口切割系统,其特征在于,所述视觉支撑架(2)呈l型,所述视觉支撑架(2)弯折处设有加强筋。
9.根据权利要求1所述的一种机器人免示教坡口切割系统,其特征在于,所述视觉传感器(4)为粗精一体视觉传感器。
10.根据权利要求1所述的一种机器人免示教坡口切割系统,其特征在于,两个所述切割平台(1)对称设置在所述切割机器人(7)两侧,形成双工位。
技术总结本技术提供一种机器人免示教坡口切割系统,其包括切割平台、视觉支撑架、机器人控制柜、视觉传感器、气源箱、切割机器人、割枪和智能切割控制器,切割平台上表面间隔设有等高柱,视觉支撑架一端固定在地面上,视觉支撑架另一端连接视觉传感器,视觉传感器位于切割平台上方,机器人控制柜连接切割机器人,切割机器人夹持割枪,气源箱连通割枪内部管路,切割平台位于切割机器人工作范围内,智能切割控制器数据连接视觉传感器和所述机器人控制柜。其既免去了人工对机器人示教程序的麻烦,又提高了加工完成产品的精度与效率。技术研发人员:周立华,高俊,陈鑫受保护的技术使用者:辽宁双华焊割装备有限公司技术研发日:20240325技术公布日:2024/11/7本文地址:https://www.jishuxx.com/zhuanli/20241112/327143.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表