固定装置、擦拭机器人的基站和擦拭机器人系统的制作方法
- 国知局
- 2024-11-12 14:07:41
本技术涉及智能清洁,具体地,涉及一种固定装置、擦拭机器人的基站和擦拭机器人系统。
背景技术:
1、随着自动化、智能化技术的不断发展,智能清洁设备越来越受到人们的青睐。其中,擦拭机器人可以实现对门窗表面、尤其玻璃平面的自动擦拭,无需实时的人工操作,还可完成一些高难度的室外高空作业,大大提高了清洁工作的便利程度。
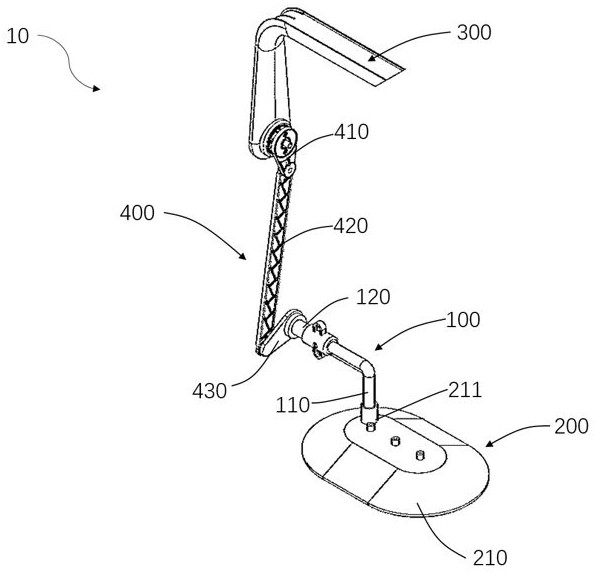
2、已知的擦拭机器人系统通常包括擦拭机器人和基站。擦拭机器人上设置有吸附机构。该吸附机构用于在擦拭机器人工作时吸附于清洁表面上,使得擦拭机器人能对清洁表面进行清洁。基站上设置有吸附装置,该吸附装置用于在擦拭机器人工作时吸附于固定面上。基站与擦拭机器人之间通过安全绳连接。
3、通常,擦拭机器人可以用于对室外的表面进行清洁。而室外的天气是影响擦拭机器人能否在室外安全工作的重要因素。根据蒲福风级,风力被划分为12个等级。其中,蒲福风级4级的风速为5.5-7.9 m/s。在该4级风力下,擦拭机器人能不掉落至地面,引发危险,是擦拭机器人的一个重要的工作参数。为了使得擦拭机器人能抗住4级风力,一种方法是可以通过增加吸附机构的吸力来实现。但是吸附机构的吸力越高,所需要的风机的动力就越大,且风机的重量也越高。而风机的重量越高又会容易引发擦拭机器人掉落的风险,所以风机的重量不能无限增大。另一种使得擦拭机器人能抗住4级风力的方法,是增加基站对擦拭机器人的拉力,使得在擦拭机器人发生跌落时,基站能及时通过安全绳提拉擦拭机器人,避免擦拭机器人掉落至地面,引发危险。而增加基站对擦拭机器人的拉力,可以通过增加基站的重力来实现。但基站的重力越大,基站的体积就越大,成本就越高,所以基站的重力不能无限增大。另一种增加基站对擦拭机器人的拉力的方法是增大基站的吸附装置的吸附力。而吸附装置的吸附面积是影响吸附装置的吸附力的重要因素。吸附装置的吸附面积越大,吸附力即越大。所以吸附装置的吸附面积不能过小,否则影响基站对擦拭机器人的拉力。
4、现有技术中,通常需要在基站上设置控制吸附装置产生吸附力或者解除吸附力的按钮。用户通过操作该按钮使得吸附装置产生吸附力或者解除吸附力。现有技术中,通过基站的按钮来控制吸附装置的方式,不仅增加了基站的成本,且增加了基站的体积,使得基站的整体结构变得复杂。
5、现有技术中,基站通常采用电机控制吸附装置与固定面之间形成负压,并通过上述按钮控制电机的开启或关闭,从而使基站吸附于固定面上。当擦拭机器人在清洁表面上清洁时,若受到不可控力,例如风力或人为拉扯力,其上的吸附机构与清洁表面之间的吸附力将会减小。当该吸附力减小至小于擦拭机器人的重力时,擦拭机器人将会跌落。由于擦拭机器人与基站通过安全绳连接,所以在擦拭机器人发生跌落时,基站能及时通过安全绳提拉擦拭机器人,避免擦拭机器人掉落至地面,引发危险。但这种通过按钮控制电机,并通过电机控制吸附装置的方式,结构复杂,成本较高。
6、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本技术的一个方面要解决的技术问题是如何实现擦拭机器人的基站与固定面之间的吸附和解脱,使得基站结构简单,用户操作方便,占地面积小且基站与固定面之间的吸附稳定可靠。
2、此外,本技术的其它方面还旨在解决或者缓解现有技术中存在的其它技术问题。
3、本技术提供了一种擦拭机器人的基站、固定装置和擦拭机器人系统,具体而言,根据本技术的一方面,提供了:
4、一种擦拭机器人的基站,其中,包括:
5、基站主体;
6、开关装置,其设置在所述基站主体上;
7、吸附装置,其设置在所述基站主体上,所述吸附装置包括吸附本体和通孔,所述吸附装置至少具有吸附状态和解附状态,在所述吸附状态下,所述开关装置关闭所述通孔,使所述吸附本体与固定面之间形成与外界不连通的吸附腔,所述吸附本体吸附于所述固定面上,在所述解附状态下,所述开关装置打开所述通孔,使所述吸附腔通过所述通孔与外界连通;
8、操纵件,其设置在所述基站主体上并能够相对于所述基站主体运动,以通过所述开关装置关闭或打开所述通孔,进而使所述吸附装置在所述吸附状态与所述解附状态之间切换,且所述吸附本体在所述吸附状态下,投影至所述固定面的面积不小于156.9平方厘米。
9、可选地,根据本技术的一种实施方式,所述操纵件构造为把手,当所述基站放置于固定面后,所述吸附装置与所述固定面接触的情况下,所述把手至少具有第一状态和第二状态,在所述第一状态下,所述把手处于能够到达的最低位置,定义该位置为第一位置,此时所述开关装置关闭所述通孔,所述吸附装置处于所述吸附状态;在所述第二状态下,所述把手处于非第一位置的其他位置,所述开关装置打开所述通孔,所述吸附装置处于所述解附状态。
10、可选地,根据本技术的一种实施方式,在所述第二状态下,所述把手处于非第一位置的其他位置,所述其他位置包含第二位置,在所述第二位置下所述把手处于能够达到的最高位置。
11、可选地,根据本技术的一种实施方式,所述把手在重力作用下自动从所述第二位置切换为所述第一位置,从而实现所述吸附本体与所述固定面之间的所述吸附状态。
12、可选地,根据本技术的一种实施方式,所述基站主体上还设置有触发部,在所述第二状态下,所述把手处于非第一位置的其他位置,所述其他位置还包含非所述第二位置的第三位置,当所述把手在用户的操作下从所述第三位置切换至所述第一位置后,所述触发部触发,以提醒用户所述吸附本体与所述固定面之间形成吸附状态。
13、可选地,根据本技术的一种实施方式,所述把手位于第一位置时所述把手最低点的高度不小于所述基站主体的高度的一半。
14、可选地,根据本技术的一种实施方式,当所述吸附装置从所述解附状态切换至所述吸附状态时,所述基站主体向下浮动的距离小于2 mm。
15、可选地,根据本技术的一种实施方式,所述操纵件直接与所述开关装置连接。
16、可选地,根据本技术的一种实施方式,所述开关装置包括与所述吸附本体连接的第一阀元件和与所述操纵件连接的第二阀元件,在所述第一阀元件上设置有开口,所述开口与所述通孔连通,所述操纵件的转动带动所述第二阀元件相对于所述第一阀元件转动,以打开和关闭所述开口。
17、可选地,根据本技术的一种实施方式,所述第一阀元件为阀体,所述第二阀元件为至少部分穿设在所述阀体中的阀芯,所述阀芯能够相对于所述阀体转动。
18、可选地,根据本技术的一种实施方式,所述阀体内贯穿设置有第一通道,所述阀芯设置有用于所述第一通道相连通的第二通道,所述第二通道的一端为敞口端,另一端为封闭端。
19、可选地,根据本技术的一种实施方式,所述开口设置在所述阀体的侧壁上,在所述阀芯的侧壁上设置有排气口,在所述阀芯相对于所述阀体转动时,所述排气口与所述开口相连通或错位,以打开或关闭所述开口。
20、可选地,根据本技术的一种实施方式,所述第一阀元件为阀体,所述第二阀元件为端面贴靠在所述第一阀元件的配对端面上的阀芯,所述开口设置在所述阀体的配对端面上,所述阀芯的端面上设置有排气口,在所述阀芯相对于所述阀体转动时,所述排气口与所述开口相连通或错位,以打开或关闭所述开口。
21、可选地,根据本技术的一种实施方式,所述开关装置包括与所述吸附本体连接的第一阀元件和与所述操纵件连接的第二阀元件,在所述第一阀元件上设置有开口,所述开口与所述通孔连通,所述操纵件的转动带动所述第二阀元件相对于所述第一阀元件沿直线运动,以打开和关闭所述开口。
22、可选地,根据本技术的一种实施方式,所述第一阀元件为阀体,所述第二阀元件为至少部分穿设在所述阀体中的阀芯,所述阀芯能够相对于所述阀体沿直线运动。
23、可选地,根据本技术的一种实施方式,在所述阀体内贯穿设置有第一通道,所述第一通道的第一端部和第二端部都为敞口端,所述阀芯至少部分地穿设在所述第一通道中。
24、可选地,根据本技术的一种实施方式,在所述阀芯和阀体其中之一的侧壁上设置有螺旋延伸的螺旋槽,在另一个的侧壁上设置有突起部,所述突起部配合到所述螺旋槽中,当所述操纵件带动所述阀芯转动时,所述突起部沿所述螺旋槽运动,从而使所述阀芯相对于所述阀体沿直线运动。
25、可选地,根据本技术的一种实施方式,所述第一通道的第一端部的直径小于所述第二端部的直径,所述开口由所述第一通道的第一端部形成,在所述阀体的侧壁上设置有排气口,所述阀芯的一端能够沿所述直线运动方向关闭所述开口。
26、可选地,根据本技术的一种实施方式,所述第一通道的第一端部的直径小于所述第二端部的直径,所述开口由所述第一通道的第一端部形成,所述第二端部与所述阀芯之间的间隙形成排气口,所述阀芯的一端能够沿所述直线运动方向关闭所述开口。
27、可选地,根据本技术的一种实施方式,所述开口由所述第一通道的第一端部形成,所述第一通道的第二端部形成排气口,所述突起部设置成环绕所述侧壁并与所述螺旋槽密封配合,当所述突起部配合到所述螺旋槽中时,所述开口到所述排气口的通路被关闭,当所述突起部从所述螺旋槽运动出时,所述开口到所述排气口的通路被打开。
28、可选地,根据本技术的一种实施方式,所述开关装置还包括分别与所述阀芯和所述操纵件连接的转动件,所述操纵件通过其自身的转动带动所述转动件转动,进一步带动所述阀芯转动。
29、可选地,根据本技术的一种实施方式,所述操纵件与所述开关装置通过传动机构连接。
30、可选地,根据本技术的一种实施方式,所述开关装置与所述传动机构在所述基站主体的前面上的投影至少部分重叠,和/或所述开关装置与所述传动机构在所述基站主体的侧面上的投影至少部分重叠,和/或所述开关装置与所述传动机构在所述基站主体的底面上的投影至少部分重叠。
31、可选地,根据本技术的一种实施方式,所述开关装置包括与所述吸附本体连接的第一阀元件和与所述操纵件连接的第二阀元件,在所述第一阀元件上设置有开口,所述开口与所述通孔连通,所述操纵件的转动带动所述第二阀元件相对于所述第一阀元件转动,以打开和关闭所述开口。
32、可选地,根据本技术的一种实施方式,所述传动机构包括沿重力方向依次铰接的第一连杆、第二连杆和第三连杆,所述第一连杆背离第二连杆的一端与所述操纵件连接,所述第三连杆背离所述第二连杆的一端与所述第二阀元件连接,所述第一阀元件包括沿水平方向延伸的第一区段和沿竖直方向延伸的第二区段,所述第二阀元件与所述第一阀元件在所述第一区段中连接。
33、可选地,根据本技术的一种实施方式,所述第一阀元件为阀体,所述第二阀元件为至少部分穿设在所述阀体中的阀芯,所述阀芯能够相对于所述阀体转动。
34、可选地,根据本技术的一种实施方式,所述阀体内贯穿设置有第一通道,所述阀芯设置有用于所述第一通道相连通的第二通道,所述第二通道的一端为敞口端,另一端为封闭端。
35、可选地,根据本技术的一种实施方式,所述开口设置在所述阀体的侧壁上,在所述阀芯的侧壁上设置有排气口,在所述阀芯相对于所述阀体转动时,所述排气口与所述开口相连通或错位,以打开或关闭所述开口。
36、可选地,根据本技术的一种实施方式,所述第一阀元件为阀体,所述第二阀元件为端面贴靠在所述第一阀元件的配对端面上的阀芯,所述开口设置在所述阀体的配对端面上,所述阀芯的端面上设置有排气口,在所述阀芯相对于所述阀体转动时,所述排气口与所述开口相连通或错位,以打开或关闭所述开口。
37、可选地,根据本技术的一种实施方式,所述开关装置包括与所述吸附本体连接的第一阀元件和与所述操纵件连接的第二阀元件,在所述第一阀元件上设置有开口,所述开口与所述通孔连通,所述操纵件的转动带动所述第二阀元件相对于所述第一阀元件沿直线运动,以打开和关闭所述开口。
38、可选地,根据本技术的一种实施方式,所述第一阀元件为阀体,所述第二阀元件为至少部分穿设在所述阀体中的阀芯,所述阀芯能够相对于所述阀体沿直线运动。
39、可选地,根据本技术的一种实施方式,在所述阀体内贯穿设置有第一通道,所述第一通道的第一端部和第二端部都为敞口端,所述阀芯至少部分地穿设在所述第一通道中。
40、可选地,根据本技术的一种实施方式,在所述阀芯和阀体其中之一的侧壁上设置有螺旋延伸的螺旋槽,在另一个的侧壁上设置有突起部,所述突起部配合到所述螺旋槽中,当所述操纵件带动所述阀芯转动时,所述突起部沿所述螺旋槽运动,从而使所述阀芯相对于所述阀体沿直线运动。
41、可选地,根据本技术的一种实施方式,所述第一通道的第一端部的直径小于所述第二端部的直径,所述开口由所述第一通道的第一端部形成,所述阀体的侧壁上设置有排气口,所述阀芯的一端能够沿所述直线运动方向关闭所述开口。
42、可选地,根据本技术的一种实施方式,所述第一通道的第一端部的直径小于所述第二端部的直径,所述开口由所述第一通道的第一端部形成,所述第二端部与所述阀芯之间的间隙形成排气口,所述阀芯的一端能够沿所述直线运动方向关闭所述开口。
43、可选地,根据本技术的一种实施方式,所述开口由所述第一通道的第一端部形成,所述第一通道的第二端部形成排气口,所述突起部设置成环绕所述侧壁并与所述螺旋槽密封配合,当所述突起部配合到所述螺旋槽中时,所述开口到所述排气口的通路被关闭,当所述突起部从所述螺旋槽运动出时,所述开口到所述排气口的通路被打开。
44、可选地,根据本技术的一种实施方式,所述开关装置还包括内外两端分别与所述阀芯和所述操纵件连接的转动件,所述操纵件通过其自身的转动带动所述转动件转动,进一步带动所述阀芯转动。
45、可选地,根据本技术的一种实施方式,所述操纵件通过带传动机构、链传动机构或齿轮传动机构带动所述转动件转动。
46、可选地,根据本技术的一种实施方式,在所述基站主体与所述把手的转动连接处设置有限位件,所述限位件在所述把手切换为第一状态后限制所述把手继续转动。
47、可选地,根据本技术的一种实施方式,所述限位件设置成卡接件,所述卡接件包括设置在所述把手上的卡接突出部和设置在所述基站主体上的卡接凹入部,在所述把手切换为第一状态时,所述卡接突出部卡入到所述卡接凹入部中,从而阻止所述把手继续转动,所述卡接突出部与所述卡接凹入部的卡接可以手动脱开,以将所述把手从第一位置切换为第二位置。
48、可选地,根据本技术的一种实施方式,所述操纵件布置在所述基站主体外部,所述开关装置布置在所述基站主体内部。
49、根据本技术的另一方面,本技术提供了固定装置,其中,所述固定装置包括:开关装置、吸附装置和操纵件,其中
50、所述开关装置的两端分别连接到所述操纵件和所述吸附装置;
51、所述吸附装置包括吸附本体和设置于所述吸附本体的通孔,所述吸附装置至少具有吸附状态和解附状态,在所述吸附状态下,所述开关装置关闭所述通孔,使所述吸附本体与固定面之间形成与外界不连通的吸附腔,所述吸附本体吸附于所述固定面上,在所述解附状态下,所述开关装置打开所述通孔,使所述吸附腔通过所述通孔与外界连通;
52、所述操纵件能够运动,以通过所述开关装置关闭或打开所述通孔,进而使所述吸附装置在所述吸附状态与所述解附状态之间切换,且所述吸附本体在所述吸附状态下,投影至所述固定面的面积不小于156.9平方厘米。
53、根据本技术的再一方面,本技术提供了一种擦拭机器人系统,其中,包括:以上所述的基站及擦拭机器人,其中,所述基站用于通过安全绳与所述擦拭机器人相连。
54、根据本技术的再一方面,本技术提供了一种擦拭机器人的基站,其中,包括:
55、基站主体;
56、开关装置,其设置在所述基站主体上;
57、吸附装置,其设置在所述基站主体上,所述吸附装置设置有通孔,所述吸附装置至少具有吸附状态和解附状态,在所述吸附状态下,所述开关装置关闭所述通孔,使所述吸附装置与固定面之间形成与外界不连通的吸附腔,在所述解附状态下,所述开关装置打开所述通孔,使所述吸附腔通过所述通孔与外界连通;
58、操纵件,其设置在所述基站主体上并能够相对于所述基站主体运动,以通过所述开关装置关闭或打开所述通孔,进而使所述吸附装置在所述吸附状态与所述解附状态之间切换,且当所述吸附装置在自所述解附状态切换至所述吸附状态时,所述基站主体向下浮动的距离小于2 mm。
59、根据本技术的再一方面,本技术提供了一种擦拭机器人系统,其中,包括:以上所述的基站及擦拭机器人,其中,所述基站用于通过安全绳与所述擦拭机器人相连。
60、根据本技术的再一方面,本技术提供了一种擦拭机器人的基站,包括:
61、基站主体;
62、开关装置,其设置在所述基站主体上;
63、吸附装置,其设置在所述基站主体上,所述吸附装置包括吸附本体和设置于所述吸附本体的通孔,所述吸附装置至少具有吸附状态和解附状态,在所述吸附状态下,所述开关装置关闭所述通孔,使所述吸附本体与固定面之间形成与外界不连通的吸附腔,所述吸附本体吸附于所述固定面上,在所述解附状态下,所述开关装置打开所述通孔,使所述吸附腔通过所述通孔与外界连通;
64、操纵件,其设置在所述基站主体上并能够相对于所述基站主体运动,以机械式地驱动所述开关装置,通过所述开关装置关闭或打开所述通孔,进而使所述吸附装置在所述吸附状态与所述解附状态之间切换。
65、本技术的有益之处包括:
66、本技术的基站具有开关装置、吸附装置和操纵件,当对操纵件进行操纵时,能够机械式地驱动开关装置,通过开关装置关闭和打开连接到吸附装置吸附腔的通孔,进而切换吸附装置的吸附和解附状态,实现基站相对于固定面的固定和解除固定,如此实现纯机械的联动控制,无需采用包含电机或电磁阀的复杂结构,控制方式稳定可靠,基站结构简单,且本技术通过操纵件机械式地驱动开关装置,如此不需要在基站上额外设置控制开关装置的按钮,如此节省了由于需要该按钮而产生的成本,另一方面不需要占用基站的额外空间来设置按钮,因为操纵件(把手)本来就是基站所具有的,所以使得基站结构简单,体积变小;
67、本技术的吸附本体在吸附状态下,投影至固定面的面积不小于156.9平方厘米,使得吸附本体吸附于光泽度不小于55°的固定面上时,操纵件在不大于633.7n的竖直向上的作用力下,无法将所述吸附装置从所述吸附状态切换到所述解附状态,这使得基站能够在使用较小占地面积的情况下,承受4级大风下由擦拭机器人的摆动所产生的拖拽安全绳的力,避免为了增大基站与固定面之间的吸附力,而增大吸附本体的面积,进而增大基站体积的情况;或者避免为了减小基站体积,减小吸附本体的面积,从而使得基站与固定面之间的吸附力不足的情况,保证了基站与固定面之间的吸附稳定可靠;此外,还降低了使用者对操纵件误操作使得吸附装置解除吸附的风险,进一步提高了基站的固定稳定性;
68、能够通过把手的重力作用来控制吸附装置的吸附与解附状态的切换,在使用者放下把手时,把手通过其重力作用从第二位置自动转动到第一位置,以通过开关装置关闭吸附腔的通孔,从而将吸附装置从解附状态切换到吸附状态,如此吸附装置从解附状态切换到吸附状态过程不需要用户动手操作,也即减少用户的操作,方便用户,并且在使用者提起把手时,又将吸附装置从吸附状态切换到解附状态,实现了基站的固定与使用者对把手的使用之间的联动。在需要移动基站时,无需用户在提拉把手的操作外,再单独对基站进行额外的控制。具体地,当擦拭机器人收纳在基站中,用户需要移动基站时,用户需要做两项操作,一项是将提手提拉至第二位置,另一项是解附操作,如手动按键进行吸盘解附,然后才能通过提拉提手移动基站。而本技术的把手被设置成,在用户提拉该把手的同时,能通过开关装置打开吸附腔的通孔,进而使得吸附装置能由吸附状态切换为解附状态。也即用户仅仅需要一个提拉动作即可完成吸附装置的解附和提拉提手握持基站两个操作,如此方便了用户的操作;此外,根据把手的状态也可以简单地判断出吸附装置的状态,进一步将基站的固定状态与其使用情况进行集成。
本文地址:https://www.jishuxx.com/zhuanli/20241112/327393.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表