一种水上结构化自动部署方法
- 国知局
- 2024-11-18 18:13:29
本发明涉及水上部署,尤其涉及一种水上结构化自动部署方法。
背景技术:
1、水上结构的部署在现代工程中具有广泛的应用,包括桥梁建设、海洋平台、浮动房屋以及水上农业等领域。随着科技的进步,自动化和智能化技术在水上结构部署中得到了越来越多的应用。例如,利用无人机和无人船进行水域勘测,利用传感器实时监测水文数据,使用机器人进行结构组装等。然而,传统的水上结构部署方法主要依赖于人工操作和静态规划,效率低下且容易受到环境变化的影响。近年来,快速随机树(rrt)算法在路径规划和机器人控制中的应用,使得自动化水上结构部署成为可能。rrt算法能够在复杂的环境中快速生成无碰撞路径,适用于动态调整和实时优化的场景。然而,现有的rrt算法主要应用于陆地环境中的路径规划,在水上环境中的应用还存在一定的挑战。
2、可以了解到,虽然现有技术在水上结构自动化部署方面取得了一定进展,但仍然存在诸多不足之处。首先,现有的水文和地质数据采集方法大多独立进行,数据的集成和处理复杂,无法形成统一的部署方案。其次,传统的rrt算法在水上环境中应用时,容易受到水流、波浪等动态因素的干扰,导致路径规划不稳定。此外,现有技术缺乏有效的模块状态监测机制,无法实时调整部署区域和结构组装过程,导致整体部署效率低下。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有存在的问题,提出了本发明。因此,本发明提供了一种水上结构化自动部署方法,用来解决背景技术中提出的问题。
3、为解决上述技术问题,本发明提供如下技术方案:一种水上结构化自动部署方法,包括:
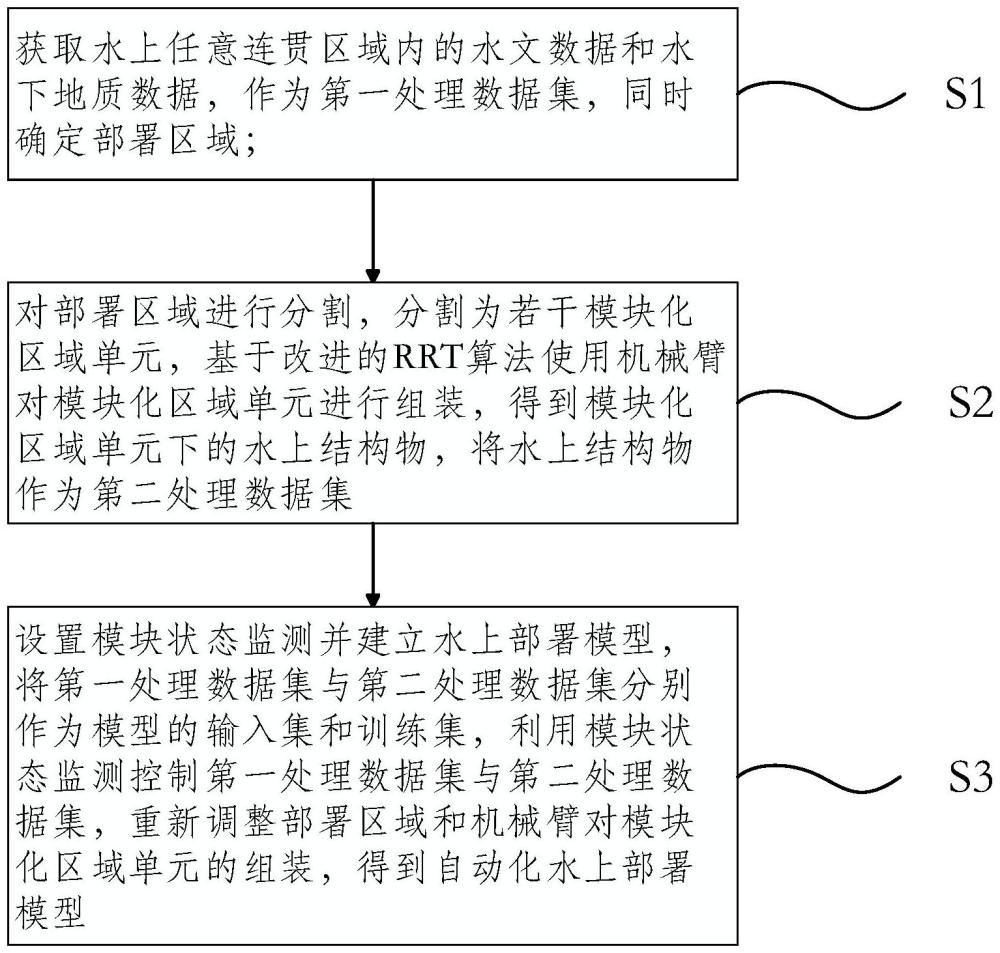
4、获取水上任意连贯区域内的水文数据和水下地质数据,作为第一处理数据集,同时确定部署区域;
5、对所述部署区域进行分割,分割为若干模块化区域单元,基于改进的rrt算法使用机械臂对所述模块化区域单元进行组装,得到模块化区域单元下的水上结构物,将所述水上结构物作为第二处理数据集;
6、设置模块状态监测并建立水上部署模型,将所述第一处理数据集与第二处理数据集分别作为模型的输入集和训练集,利用所述模块状态监测控制所述第一处理数据集与第二处理数据集,重新调整部署区域和机械臂对模块化区域单元的组装,得到自动化水上部署模型。
7、作为本发明所述的水上结构化自动部署方法的一种优选方案,其中:获取水上任意连贯区域内的水文数据和水下地质数据,作为第一处理数据集,同时确定部署区域,包括:
8、将所述任意连贯区域表示为三维图形,在所述三维图形中上半部分由水文数据组成,下半部分由水下地质数据组成,且水文数据与水下地质数据在三维图形中的占比由水文数据中的水位进行定义。
9、作为本发明所述的水上结构化自动部署方法的一种优选方案,其中:对所述部署区域进行分割,分割为若干模块化区域单元,包括:
10、以横面或纵面对部署区域进行切割,同时在每一个被切割为模块化区域单元中定义三维图形的三维坐标。
11、作为本发明所述的水上结构化自动部署方法的一种优选方案,其中:基于改进的rrt算法使用机械臂对所述模块化区域单元进行组装,得到模块化区域单元下的水上结构物,将所述水上结构物作为第二处理数据集,包括:
12、定义机械臂的起始节点qst,达到模块化区域单元的目标节点qed,初始化图g,使所述图g包含机械臂的所有节点q,设置最大迭代次数k和步长δq;
13、从模块化区域单元中随机采样一个三维坐标zi;
14、在图g中找到一个距离和三维坐标zi最近的节点qi,沿着qi向另一个节点qj所在的位置扩展δq个步长,得到新节点q1;
15、若q1在单位内的碰撞体积并未超过模块化区域单元的体积,则将q1加入图g中;否则,返回至随机采样一个三维坐标zi;
16、搜索q1的邻近节点,构成邻近节点集所述邻近节点为图g中与q1距离小于qed的节点;
17、其中,每将q1加入图g中或返回至随机采样一个三维坐标zi,执行一次k=k+1。
18、作为本发明所述的水上结构化自动部署方法的一种优选方案,其中:还包括:
19、若邻近节点集中包含qed,则将qed加入图g中,判断当前迭代次数是否大于最大迭代次数k;若大于,则得到由节点连接而成的水上结构物;若不满足,则继续迭代。
20、作为本发明所述的水上结构化自动部署方法的一种优选方案,其中:设置模块状态监测并建立水上部署模型,将所述第一处理数据集与第二处理数据集分别作为模型的输入集和训练集,包括:
21、所述建立水上部署模型表示为:
22、
23、其中,||qi-zi||表示节点qi和zi之间的欧氏距离,表示邻近节点集的大小;qk为不符合图g与q1距离的节点,使用heaviside函数进行过滤;f(qk,t)表示为节点qk在当前时间间隔t的变化位置;σ表示为节点之间的距离权重,t为总时间间隔。
24、作为本发明所述的水上结构化自动部署方法的一种优选方案,其中:利用所述模块状态监测控制所述第一处理数据集与第二处理数据集,重新调整部署区域和机械臂对模块化区域单元的组装,得到自动化水上部署模型,包括:
25、所述模块状态监测,监测所述第一处理数据集,若所述第一处理数据集中的水文数据和地质数据发生变化,则对应改变三维图形的占比,并重新定义三维图形的坐标,将重新定义的三维图形的坐标送入第二处理数据集中,修改对应的qed。
26、与现有技术相比,发明有益效果为:获取水上任意连贯区域内的水文数据和水下地质数据,作为第一处理数据集,同时确定部署区域;对部署区域进行分割,分割为若干模块化区域单元,基于改进的rrt算法使用机械臂对所述模块化区域单元进行组装,得到模块化区域单元下的水上结构物,将水上结构物作为第二处理数据集;设置模块状态监测并建立水上部署模型,将第一处理数据集与第二处理数据集分别作为模型的输入集和训练集,利用模块状态监测控制第一处理数据集与第二处理数据集,重新调整部署区域和机械臂对模块化区域单元的组装,得到自动化水上部署模型;本发明rrt算法的运行效率,减少了路径规划时间,还解决了rrt算法在水上环境的应用问题,显著提升了水上结构自动化部署的整体性能。
技术特征:1.一种水上结构化自动部署方法,其特征在于,包括:
2.如权利要求1所述的水上结构化自动部署方法,其特征在于,获取水上任意连贯区域内的水文数据和水下地质数据,作为第一处理数据集,同时确定部署区域,包括:
3.如权利要求2所述的水上结构化自动部署方法,其特征在于,对所述部署区域进行分割,分割为若干模块化区域单元,包括:
4.如权利要求2或3所述的水上结构化自动部署方法,其特征在于,基于改进的rrt算法使用机械臂对所述模块化区域单元进行组装,得到模块化区域单元下的水上结构物,将所述水上结构物作为第二处理数据集,包括:
5.如权利要求4所述的水上结构化自动部署方法,其特征在于,还包括:
6.如权利要求5所述的水上结构化自动部署方法,其特征在于,设置模块状态监测并建立水上部署模型,将所述第一处理数据集与第二处理数据集分别作为模型的输入集和训练集,包括:
7.如权利要求6所述的水上结构化自动部署方法,其特征在于,利用所述模块状态监测控制所述第一处理数据集与第二处理数据集,重新调整部署区域和机械臂对模块化区域单元的组装,得到自动化水上部署模型,包括:
技术总结本发明公开了一种水上结构化自动部署方法包括,通过获取水上任意连贯区域内的水文数据和水下地质数据,作为第一处理数据集,并基于改进的RRT算法使用机械臂对模块化区域单元进行组装,形成水上结构物;通过设置模块状态监测,建立水上部署模型,将第一处理数据集与第二处理数据集分别作为模型的输入集和训练集,利用模块状态监测控制数据集的重新调整,实现自动化水上部署模型;本发明RRT算法的运行效率,减少了路径规划时间,还解决了RRT算法在水上环境的应用问题,显著提升了水上结构自动化部署的整体性能。技术研发人员:宫旭柱受保护的技术使用者:江苏海事职业技术学院技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/327662.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。