基于空间网格的无人机管控方法、系统、设备及介质与流程
- 国知局
- 2024-11-18 18:15:45
本发明涉及无人机管理,具体地说是一种基于空间网格的无人机管控方法、系统、设备及介质。
背景技术:
1、当前无人机管控在智能化管控技术、网格化管理、反无人机技术等方面取得了很大的进展。智能化管控技术,利用人工智能、大数据、云计算等先进技术,实现无人机飞行路径的智能化规划、实时监控与预警。例如,通过机器学习算法预测无人机飞行轨迹,提前识别潜在冲突;利用大数据分析优化飞行路径,提高飞行效率。网格化管理将地理空间划分为多个网格单元,对无人机飞行区域进行精细化管理。这种方法不仅有助于明确飞行区域的安全等级,还能为无人机提供精准的导航与定位服务。反无人机技术针对无人机“黑飞”及非法入侵等问题,各国研发了多种反无人机系统,如射频干扰、激光摧毁、捕捉网等。这些技术为无人机管控提供了有效的应急响应手段。
2、虽然无人机在航拍、农业、物流、环境监测等多个领域得到广泛应用。然而,无人机的无序飞行可能造成侵犯隐私、干扰民航交通,引发安全事故等诸多问题。无人机飞行区域涉及城市、乡村、水域、山区等多种地形,且受到天气、交通状况等多种因素的影响,使得飞行区域的安全等级难以准确判断。无人机数量呈爆炸式增长,给空域管理带来巨大压力。无人机通信方式多样,包括无线电、wifi网络、卫星通信等,使得无人机管控面临技术挑战。例如,如何确保无人机在复杂电磁环境下的稳定通信,如何有效防止黑客入侵等。
3、故如何有效管理无人机的飞行路径,确保无人机在安全区域内飞行是目前亟待解决的技术问题。
技术实现思路
1、本发明的技术任务是提供一种基于空间网格的无人机管控方法、系统、设备及介质,来解决如何有效管理无人机的飞行路径,确保无人机在安全区域内飞行的问题。
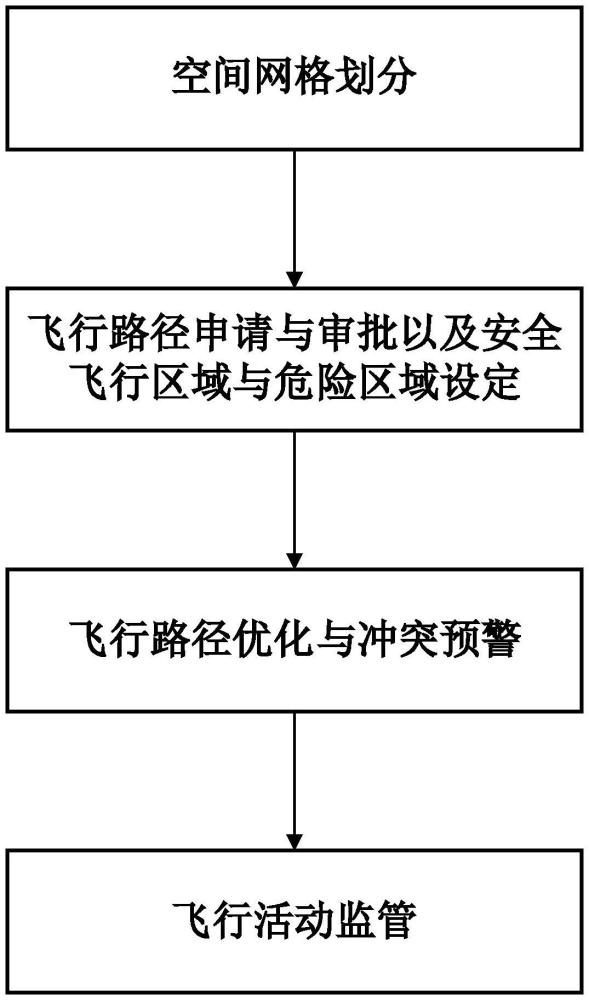
2、本发明的技术任务是按以下方式实现的,一种基于空间网格的无人机管控方法,该方法是通过将目标飞行区域划分为多个精细的网格单元,并利用地理信息系统(gis)和智能算法技术,实现对无人机飞行活动的全面、实时及精细化管控;具体如下:
3、空间网格划分:利用地理信息系统(gis)技术,将目标区域的地理空间划分为多个大小可调的网格单元,每个网格单元包含明确的地理坐标信息、高度范围及属性标签,属性标签包括城市、乡村、水域、禁飞区;
4、飞行路径申请与审批以及安全飞行区域与危险区域设定:提交飞行路径申请,根据无人机规划的飞行路径,自动匹配所经过的网格单元,并检查对应网格单元的属性,以判断是否存在机场及人口密集区的危险区域;并基于网格单元的属性,自动设定安全飞行区域和危险区域,安全飞行区域为允许无人机飞行的网格集合,危险区域则明确标识为禁止或限制飞行的区域,还根据天气及交通状况的实时数据动态调整安全飞行区域的范围;
5、飞行路径优化与冲突预警:对申请的飞行路径进行智能优化,以尽可能避开危险区域并考虑飞行效率;在飞行过程中,实时监测无人机位置,若检测到无人机即将进入危险区域或与其他飞行器存在冲突风险,则立即发出预警并给出避让建议;
6、飞行活动监管:通过飞行轨迹记录与追踪、飞行区域管理、飞行权限审批、飞行状态监测、飞行数据报告及合规性检查的方式对无人机飞行进行全面管控。
7、作为优选,空间网格划分具体如下:
8、对地理空间进行网格划分;
9、在网格划分完成后,对每个网格单元挂载相应的属性标签;
10、对网格单元的属性标签进行分类。
11、更优地,对地理空间进行网格划分具体如下:
12、数据准备:收集目标区域的地理信息数据,并确保数据的准确性和时效性,方便后续分析;其中,地理信息数据包括地形图、行政区划图及高程数据;
13、选择合适的坐标系:根据目标区域的位置和形状,选择适合的地理坐标系;其中,地理坐标系包括wgs-84、cgcs2000及utm;
14、设定网格参数:根据管理需求的精细程度和数据处理能力确定立体网格的大小,网格划分和编码基于北斗网格编码或geosot网格编码的空间网格剖分编码方案;
15、划分网格:使用网格划分工具,按照设定的参数对目标区域的地理空间进行划分;
16、网格编码与索引:为每个网格单元分配唯一的编码或标识符,以便后续管理和查询,并建立网格索引,提高数据检索和处理的效率;
17、在网格划分完成后,对每个网格单元挂载相应的属性标签具体如下:
18、定义标签体系:根据管理需求,预先定义一套标签体系,明确标签的种类、含义和取值范围;
19、数据收集与分析:收集目标区域的各类地理信息和属性数据,并通过空间分析,将收集到的数据与网格单元进行关联;
20、挂载标签:根据分析结果,为每个网格单元分配相应的标签,使用属性表或数据库管理系统对关联关系进行管理,确保标签的准确性和一致性,避免信息冗余或冲突;
21、验证与调整:对挂载的标签进行验证,确保符合实际情况和管理需求,并根据验证结果,对标签进行调整和优化;
22、对网格单元的属性标签进行分类具体如下:
23、地理位置与地形特征:考虑平原、丘陵、山地、高原的地形特征对飞行或管理的影响,根据网格单元所处的市、乡村、山区、水域的地理位置进行分类;
24、行政管理与区划:考虑不同行政区划下的管理政策和法规差异,按照行政区划对网格单元进行分类;
25、飞行限制与安全因素:考虑飞行高度限制、飞行速度限制的安全因素,设立禁飞区及限飞区的标签,以确保飞行安全;
26、自然资源与环境因素:考虑气候、气象、空气质量的环境因素对飞行或管理的影响,根据网格单元内的森林、矿产、水资源的自然资源进行分类。
27、其中,标签类型具体如下:
28、地理位置:城市、乡村、水域、山区;
29、飞行限制:禁飞区、限飞区、临时限制区;
30、高度范围:低空、中空、高空;
31、自然资源:森林保护区、矿产开采区、水源地;
32、环境因素:气候类型、气象条件、空气质量等级;
33、特殊用途:机场周边、军事设施附近、自然保护区等。
34、作为优选,飞行路径申请与审批具体如下:
35、在飞行路径申请时,自动匹配无人机飞行路径所经过的网格单元;
36、在确定飞行路径所经过的网格单元后,进一步检查对应网格单元的属性,以判断是否存在危险区域;
37、判断飞行路径存在危险时,将推荐一个最佳飞行路径以避开这些危险区域。
38、更优地,在飞行路径申请时,自动匹配无人机飞行路径所经过的网格单元具体如下:
39、飞行路径解析:输入或上传飞行路径,对应飞行路径是一系列的经纬度点或是一条明确的飞行轨迹,先解析输入数据,将输入数据转化为在地图上显示的路径;
40、网格数据准备:确保已存在目标区域的网格划分数据,包括每个网格单元的边界、编码和地理位置信息;其中,网格数据通常以数据库或gis图层的形式存储,便于快速检索和查询;
41、路径与网格交集计算:计算飞行路径与各个网格单元的交集,通过遍历飞行路径上的每个点或分段,检查每个点或分段是否落在任一个网格单元内来实现;若点或分段落在网格单元内,则将对应网格单元标记为飞行路径所经过的网格;
42、路径优化与匹配:对于复杂的飞行路径,还支持进行路径优化,以减少不必要的网格交叉或重叠,优化后的飞行路径将更精确地匹配到相应的网格单元上;
43、在确定飞行路径所经过的网格单元后,进一步检查对应网格单元的属性,以判断是否存在危险区域具体如下:
44、网格属性查询:查询每个所经过网格单元的属性标签,属性标签在网格划分时已被赋予,并存储在数据库中;
45、危险区域判断逻辑:根据预设的判断逻辑,分析每个网格单元的属性标签;若网格单元的属性标签中包含任何危险区域的标识,则判断对应网格单元为危险区域;
46、综合评估:对于连续经过多个危险网格单元的情况,还要进行额外的风险评估,以判断整个飞行路径的危险性;例如,即使飞行路径短暂穿越某个危险区域,但如果该区域对飞行安全不构成直接威胁(如距离足够远、高度足够高),则可能不被视为严重危险;
47、判断飞行路径存在危险时,将推荐一个最佳飞行路径以避开这些危险区域具体如下:
48、路径规划算法:综合距离、时间、高度限制、飞行限制多种因素,利用a算法、dijkstra算法、rrt算法的路径规划算法重新规划飞行路径,找到一条避开危险区域且符合其他约束条件的最佳路径;
49、约束条件设置:在进行路径规划时,明确设置各种约束条件,约束条件包括飞行高度限制、飞行速度限制、禁飞区范围、人口密集区避让距离;
50、路径评估与优化:生成多个可能的飞行路径后,基于安全性、效率、经济性的多个指标对路径进行评估,选择出最佳路径;
51、路径展示与确认:将推荐的最佳飞行路径展示给无人机操作员进行确认,根据实际情况对路径进行调整或确认无误后提交审批。
52、作为优选,飞行路径优化与冲突预警具体如下:
53、飞行路径的优化,具体如下:
54、地形与气象数据集成:首先,需集成高精度的数字高程模型dem地形数据、禁飞区信息以及风向、风速、云层高度实时气象数据,用于构建飞行环境的三维模型;
55、路径规划算法:综合考虑飞行高度、速度限制、能耗效率及避开障碍物(如山脉、建筑物、禁飞区)因素,采用路径规划算法在给定起点和终点之间搜索最优路径;
56、多目标优化:除了基本的避障和路径最短外,引入同时优化飞行时间、能耗、飞行平稳度的多目标优化策略,通过权重分配,平衡不同目标之间的优先级;
57、动态调整:在飞行过程中,根据风向变化、新出现的障碍物的实时数据动态调整飞行路径,确保路径的实时最优性;
58、监测无人机是否即将进入危险区域或与其他飞行器存在冲突风险,具体如下:
59、高精度定位与追踪:利用gps、北斗等卫星导航系统结合惯性导航系统(ins),实现无人机的高精度实时定位;同时,通过雷达、ads-b(广播式自动相关监视)技术追踪周围其他飞行器的位置;
60、环境感知:结合视觉传感器(如摄像头)、激光雷达(lidar),增强无人机对周围环境的感知能力,识别出潜在的障碍物和危险区域;
61、冲突检测算法:利用冲突检测算法,基于无人机的位置、速度、航向以及周围飞行器的相应信息,预测未来设定时间内是否会发生碰撞或进入危险区域;
62、实时数据分析:对收集到的数据进行实时处理和分析,快速识别出潜在的风险,并在必要时触发预警机制;
63、一旦检测到冲突或即将进入危险区域,立即生成避障策略,避障策略包括计算新的飞行路径,确保无人机能够安全避开障碍物或危险区域,同时考虑飞行效率和稳定性;其中,避障策略能够根据实时情况动态调整,以应对突发情况或新的障碍物出现;通过无人机操作界面或远程控制系统,及时将避障建议通知给操作人员,并允许在必要时进行手动干预或确认;在紧急情况下或操作人员未响应时,自动执行避障操作,确保无人机的安全。
64、作为优选,飞行活动监管具体如下:
65、飞行轨迹记录与追踪:实时记录无人机的位置、速度、高度及航向的飞行参数,并生成详细的飞行轨迹图;同时,支持对历史飞行数据的查询和回放,以便进行事后分析和审计;
66、飞行区域管理:设定禁飞区及限飞区的特定区域,对无人机的飞行范围进行限制;当无人机试图进入特定区域时,能够及时发出警告并可能采取干预措施;
67、飞行权限审批:对于需要特殊许可的飞行活动,支持飞行计划的提交、审批流程;审批人员基于飞行区域、时间及无人机类型的多种因素进行决策;
68、飞行状态监测:实时监测无人机的飞行状态,确保无人机在良好的工作状态下运行;其中,无人机的飞行状态包括电池电量、信号强度及设备健康状况;
69、飞行数据报告:定期生成飞行数据报告,为运营者和管理部门提供决策支持;其中,飞行数据包括飞行时长、飞行区域、飞行效率的关键指标;
70、合规性检查:根据相关行业标准,对无人机的飞行活动进行合规性检查,确保无人机操作符合规定。
71、一种基于空间网格的无人机管控系统,该系统用于实现如上述的基于空间网格的无人机管控方法;该系统包括:
72、空间网格划分单元,用于利用地理信息系统(gis)技术,将目标区域的地理空间划分为多个大小可调的网格单元,每个网格单元包含明确的地理坐标信息、高度范围及属性标签,属性标签包括城市、乡村、水域、禁飞区;
73、飞行路径申请与审批单元,用于提交飞行路径申请,根据无人机规划的飞行路径,自动匹配所经过的网格单元,并检查对应网格单元的属性,以判断是否存在机场及人口密集区的危险区域;
74、安全飞行区域与危险区域设定单元,用于基于网格单元的属性,自动设定安全飞行区域和危险区域,安全飞行区域为允许无人机飞行的网格集合,危险区域则明确标识为禁止或限制飞行的区域,还根据天气及交通状况的实时数据动态调整安全飞行区域的范围;
75、飞行路径优化与冲突预警单元,用于对申请的飞行路径进行智能优化,以尽可能避开危险区域并考虑飞行效率;在飞行过程中,实时监测无人机位置,若检测到无人机即将进入危险区域或与其他飞行器存在冲突风险,则立即发出预警并给出避让建议;
76、飞行活动监管单元,用于通过飞行轨迹记录与追踪、飞行区域管理、飞行权限审批、飞行状态监测、飞行数据报告及合规性检查的方式对无人机飞行进行全面管控。
77、一种电子设备,包括:存储器和至少一个处理器;
78、其中,所述存储器上存储有计算机程序;
79、所述至少一个处理器执行所述存储器存储的计算机程序,使得所述至少一个处理器执行如上述的基于空间网格的无人机管控方法。
80、一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,所述计算机程序可被处理器执行以实现如上述的基于空间网格的无人机管控方法。
81、本发明的基于空间网格的无人机管控方法、系统、设备及介质具有以下优点:
82、(一)本发明提高了飞行安全性:通过精确划分空间网格并设定安全飞行区域,有效避免无人机进入危险区域,减少了安全事故的发生;
83、(二)本发明优化了空域资源利用:智能规划飞行路径,减少不必要的绕飞,提高飞行效率,同时减少对其他航空器的干扰;
84、(三)本发明提升了管理效率:自动化、智能化的飞行路径申请与审批流程,减轻人工负担,提高管理效率;
85、(四)本发明增强了监管能力:全面的飞行轨迹记录与追踪功能,为无人机监管提供有力支持,确保飞行活动合规;
86、(五)本发明解决了当前无人机飞行管理中存在的空间定位不精确、飞行路径审批繁琐、飞行安全难以保障等问题,通过引入空间网格划分技术,将复杂的地理空间简化为易于管理和分析的网格单元,实现对无人机飞行活动的全面、实时和精细化管控;
87、(六)本发明通过精确划分地理空间为网格,实现无人机飞行路径的智能化申请与管理,确保无人机在设定的安全区域内飞行,同时规避危险区域,保障无人机操作的安全性及空域资源的合理利用;
88、(七)本发明能够自动处理飞行路径的申请与审批,利用网格单元的属性信息快速判断飞行路径的合规性,从而简化了传统的人工审批流程;同时,本发明通过实时监测无人机位置,结合预设的安全飞行区域和危险区域,能够在飞行过程中提供及时的预警和避让建议,有效提升了飞行安全性;本发明还具备飞行路径优化功能,能够根据多种环境因素智能调整飞行路径,提高飞行效率并减少能源消耗;
89、(八)本发明还具备飞行权限审批功能,根据飞行区域、时间、无人机类型等多种因素进行审批决策;安全飞行区域与危险区域设定,系统通过集成实时数据源,如气象站、交通监控等,实现安全飞行区域的动态调整;
90、(九)本发明采用多目标优化算法,结合地形、气象、飞行限制等多种因素,生成最优飞行路径,并在飞行过程中实时监测并预测潜在冲突,提供及时的避让建议。
本文地址:https://www.jishuxx.com/zhuanli/20241118/327873.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。