一种斑马线人车碰撞预警方法及系统
- 国知局
- 2024-11-18 18:13:34
本发明涉及交通安全监测,具体涉及一种斑马线人车碰撞预警方法及系统。
背景技术:
1、行人过斑马线时,尤其在一些无信号灯的路段,由于视线受阻等原因,行人突然从驾驶员视觉盲区出现(即“人车碰撞”),导致驾驶员很难及时反应,从而引发交通事故。对“人车碰撞”进行预警,及时提醒行人及驾驶员,有助于减少交通事故的发生。目前缺乏有效、可行的“人车碰撞”预警方案。
技术实现思路
1、发明目的:本发明的第一目的是提供一种准确性、可行性高的斑马线人车碰撞预警方法;本发明的第二目的是提供一种斑马线人车碰撞预警系统。
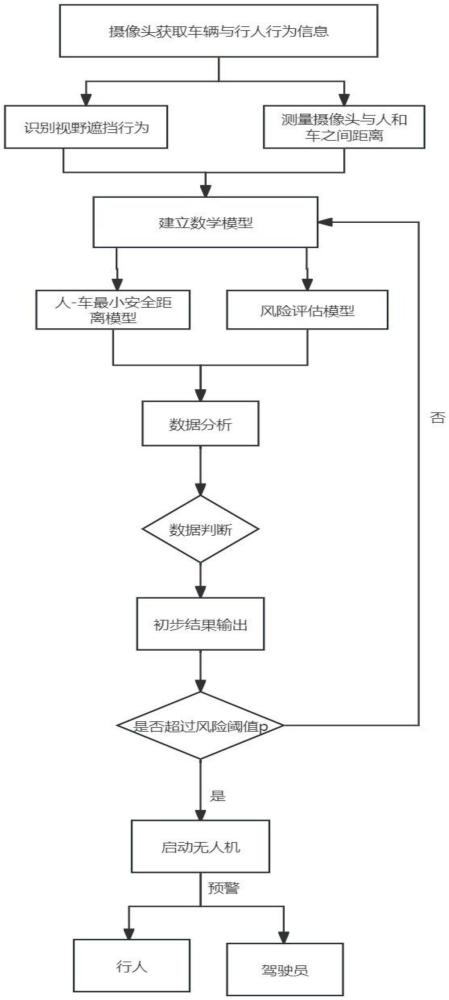
2、技术方案:本发明所述的斑马线人车碰撞预警方法,包括:
3、(1)通过设置在人行道一侧的摄像头采集设定监控区域内的视频数据,通过图像识别,确定人行道对侧是否有过街行人以及后车视野是否受前车或其他事物遮挡,若同时满足,则执行步骤(2);
4、(2)通过单目测距算法,计算后车与摄像头之间的距离l1以及行人与摄像头之间的距离l2,确定人车之间的距离s;
5、(3)建立人-车最小安全距离模型,确定纵向安全距离dx,当人车距离s的纵向分量scosγ小于等于纵向安全距离dx时,执行步骤(4);γ为行人与车所在直线与车辆行驶方向之间的夹角;
6、(4)建立风险评估模型,判定发生“人车碰撞”的概率,若大于等于阈值p,则执行步骤(5),否则视“人车碰撞”不会发生;
7、(5)通过两架无人机进行预警,一架配置于人行道上方以提醒行人,另一架配置于道路一侧以提醒驾驶员。
8、进一步地,步骤(1)中,通过yolov5算法进行图像识别,当人行道对侧出现行人时,即判定有过街行人;通过yolov5算法检测车辆并生成每辆车的边界框,使用边界框的坐标分析这些边界框的位置和相互重叠的程度,确定车辆之间的空间关系;如果一辆车的边界框在另一辆车边界框的上方或前方,并且两车边界框有重叠,则后车视野被前车遮挡。
9、进一步地,步骤(2)中,后车与摄像头之间的距离l1和行人与摄像头之间的距离l2计算公式如下:
10、
11、其中,i=1,2;c为常数;bp为bpix摄像头中实际物体在图片中的大小;
12、将摄像头、行人和车辆相连为三角形,根据三角形关系,求出人车之间的距离s:
13、
14、其中,ω为车辆和行人与摄像头之间的夹角。
15、进一步地,
16、
17、其中,r为待测车辆或行人的半径;ap为apix固定像素,即像素大小;α为视野角度;
18、通过yolov5算法测量参照物在图像中的像素尺寸,根据像素尺寸与参照物已知的实际尺寸得到一个比例因子,这个比例因子用于将图像中车辆或行人的像素尺寸转换为实际尺寸;
19、首先,确定参照物在图像中的边界框,测量其宽度的像素值;设参照物图像中的宽度为pwref像素,参照物的实际宽度是已知的,设为wref;使用参照物的像素尺寸和实际尺寸,计算出宽度的比例因子sw:
20、
21、对于图像中待测量的车辆或行人,同样测量其边界框的像素宽度pwobj,通过上述求出的比例因子将车辆或行人的像素尺寸转换为实际尺寸;车辆或行人的实际宽度wobj通过以下公式求出:
22、wobj=pwobj×sw
23、其中车辆或行人半径r通过实际宽度wobj除以2得到:
24、
25、进一步地,步骤(3)中,人-车最小安全距离模型不考虑横向偏移,即垂直道路方向的偏移,纵向安全距离即为车辆沿道路行驶方向人车之间的最小安全距离,即求纵向距离dx;
26、
27、其中,vv表示车辆制动前的初始速度,ts表示驾驶员反应时间,amax表示制动时的最大制动减速度,vp表示车辆制动时行人行走的速度,tp表示车辆产生减速行为后行人行走的时间,通过vptp cosθ即可计算出行人纵向走过的距离,θ为车辆的航向角;ds表示停车安全距离,即汽车与行人可接受的安全停车间隔。
28、进一步地,步骤(4)中,利用环境影响参数建立风险评估模型以确定潜在风险p(γsk=1),环境影响参数包括可行驶通道cr、受视野遮挡下的流量ω0、穿越车道数n1、遮挡物速度v0、隔离带di、车头时距th以及时空上下文st;
29、可行驶通道cr通过判断“人车碰撞”现象车道是否为交通参与者按照交通规则可行驶的车道来进行赋值:
30、
31、受视野遮挡下的流量ω0通过对交通参与者在遮挡区域周围流量水平进行赋值:
32、
33、穿越车道数n1通过行人从视野遮挡区域后穿过的单向车道数进行赋值:
34、
35、遮挡物速度v0是由遮挡物朝着遮挡区域方向移动的速度水平进行赋值,其中令静态遮挡物的遮挡速度v0=0:
36、
37、隔离带di通过交通参与者穿越的通道上是否设有隔离阻挡物来进行赋值:
38、
39、车头时距th由“人车碰撞”现象车道的车辆与同行道的前方车辆的车头时距进行赋值:
40、
41、时空上下文st通过考虑上下班高峰期或位于学校、住宅区等行人容易出现的地方,其赋值为:
42、
43、潜在风险γsk通过对7个环境影响因素综合考虑,将其分类为安全和风险两种情况,即:
44、
45、设平均每分钟到达视野遮挡区域内的人数为ω,因行人进入视野遮挡区域的行为为随机性的,行人进入遮挡区域的数量服从于泊松分布,则行人随机横穿道路发生“人车碰撞”的概率为:
46、
47、其中,p(γsk=1)表示行人横穿道路发生“人车碰撞”事件的概率;1-e-ω/60表示单位时间内行人抵达视野遮挡区域的概率;e-ω/60=p(n(t=1s))=0为无人抵达遮挡区域的概率;kρ为环境影响系数。
48、进一步地,
49、
50、其中,kc表示“交通参与者违章穿越道路概率系数”,服从正态分布;kd表示“隔离带影响系数”;kt表示“车头时距影响系数”;kv表示“障碍物速度影响系数”。
51、进一步地,kc~n(0.4,0.02),kd=0.46,kv=1.45,kt=0.05。
52、进一步地,配置阈值p=0.35,比较p(γsk=1)与阈值p的大小进行预警:
53、
54、本发明所述的斑马线人车碰撞预警系统,包括:
55、图像采集模块,用于采集设定监控区域内的车辆和行人视频数据;
56、图像识别模块,用于对采集的车辆和行人视频数据通过yolov5算法进行图像识别,当人行道对侧出现行人时,即判定有过街行人;同时识别是否有车辆出现,并判断后车视野是否受遮挡;若存在视野遮挡的情况,通过单目测距算法计算出车辆与摄像头的距离l1和行人与摄像头的距离l2,计算人车之间的距离s,判断人车距离s的纵向分量scosγ是否小于等于纵向安全距离dx;
57、风险评估模块,用于当人车距离s的纵向分量scosγ小于等于纵向安全距离dx时,根据风险评估模型,判定发生“人车碰撞”的概率;
58、以及,预警模块,用于当发生“人车碰撞”的概率大于等于阈值p时,派遣两架无人机进行预警,一架配置于人行道上方以提醒行人,另一架配置于道路一侧以提醒驾驶员。
59、有益效果:本发明与现有技术相比,具有如下显著优点:本发明通过yolov5算法与单目测距算法相结合,能够及时准确地发现车辆之间的视野遮挡问题,并判断人车之间是否有冲突碰撞的风险,当有风险时,通过无人机及时预警,减少“人车碰撞”交通事故发生。
本文地址:https://www.jishuxx.com/zhuanli/20241118/327671.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表