一种智能车库寻车方法及系统与流程
- 国知局
- 2024-11-06 14:31:25
本技术涉及智能车库系统的,尤其是涉及一种智能车库寻车方法及系统。
背景技术:
1、当前随着车辆保有量的不断增加,人们对停车的需求不断上升,而在地面车位越发紧张的情况下,越来越多的地下车库顺应需求而不断建造开放,地下车库的体量也从几十个车位慢慢发展到几百个车位。
2、随着地下车库体量的增加,地下车库的占地面积和车位规划也不断增大,车主在地下车库寻车也变得极为困难,往往在车主知道车位号、分区号的前提下还是无法在复杂的地下车库中找到自己的车辆,同时,又因为地下车库信号普遍较差,其也无法使用导航寻找车辆。
3、公开号为cn117496738a的中国发明公开了一种基于光学符号识别技术匹配工程图纸的地下车库寻车系统,其中,预设平面地图模块提供平面地图,记录停车位置模块为提供车主停放位置坐标,反向停车模块获取车主起始点信息并根据起始位置和停车位置结合平面图像以生成指引图,其中,指引图包括平面寻车指引路线和沿途车位编号。
4、因上述技术方案是在预设的平面地图中添加起点和终点信息以生成指引图,故其生成的指引图中会包含每层车库中的所有道路信息和车位信息,同时每个车位上还为了在后续丢失路线时重新寻找位置而增加了车位号显示,这就导致整个指引图显示内容繁多且复杂,同时,车主为了避免走错需要反复查看引导图中的车位号以与当前目视的车位号进行比对,而指引图的显示终端为车主的手机,手机因显示面积小,故车主需要反复放大或缩小指引图,整体的指引不清晰,同时在生成指引图时也需要花费较高的算力得到并显示指引路线。
技术实现思路
1、为了得到更精简的寻车指引信息,本技术提供一种智能车库寻车方法及系统。
2、第一方面,本技术提供一种智能车库寻车方法,采用如下的技术方案:
3、一种智能车库寻车方法,包括以下步骤:
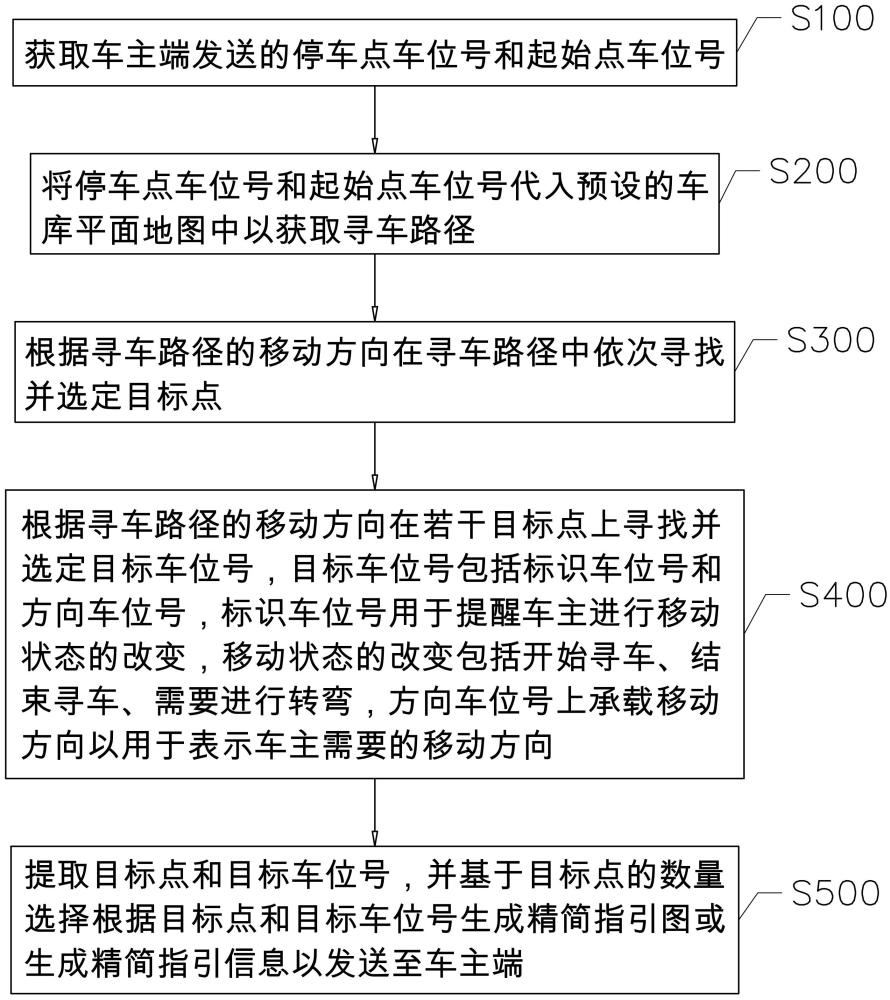
4、获取车主端发送的停车点车位号和起始点车位号;
5、将所述停车点车位号和所述起始点车位号代入预设的车库平面地图中以获取寻车路径;
6、根据所述寻车路径的移动方向在所述寻车路径中依次寻找并选定目标点,所述目标点的类型包括路径起点、路径终点和路径转弯点;
7、根据所述寻车路径的移动方向在若干所述目标点上寻找并选定目标车位号,其中所述目标车位号包括标识车位号和方向车位号,所述标识车位号用于提醒车主进行移动状态的改变,所述移动状态的改变包括开始寻车、结束寻车、需要进行转弯,所述方向车位号上承载移动方向以用于表示车主需要的移动方向;
8、提取所述目标点和所述目标车位号,并基于所述目标点的数量选择根据所述目标点和所述目标车位号生成精简指引图或生成精简指引信息以发送所述车主端。
9、在其中的一些实施例中,所述目标车位号的数量为2m-1个,m表征为所述目标点的总数;
10、所述路径终点只对应于一个所述标识车位号,所述路径起点和所述路径转弯点皆对应两个所述目标车位号,其中,两个所述目标车位号分别为一个所述标识车位号和一个所述方向车位号。
11、在其中的一些实施例中,根据所述寻车路径的移动方向在若干所述目标点上寻找并选定目标车位号,包括以下步骤:
12、判断所述目标点的类型;
13、若所述目标点为路径起点,则将所述起始点车位号定义为所述标识车位号,并将所述起始点车位号在所述寻车路径的移动方向的正向上相邻的车位号定义为所述方向车位号;
14、若所述目标点为路径终点,则将所述停车点车位号定义为所述标识车位号;
15、若所述目标点为路径转弯点,则将所述目标点两端的路径分别基于移动方向定义为转弯前路段和转弯后路段,并将位于所述转弯前路段上的最末位的车位号定义为所述标识车位号,将位于所述转弯后路段上的最前位的车位号定义为所述方向车位号。
16、在其中的一些实施例中,根据所述寻车路径的移动方向在若干所述目标点上寻找并选定目标车位号,具体还包括:
17、若所述目标点为路径起点,则选定的所述方向车位号对应的车位与所述标识车位号对应的车位位于所述寻车路径的同侧;
18、若所述目标点为路径转弯点,则选定的所述方向车位号对应的车位与所述标识车位号对应的车位位于所述寻车路径的对侧。
19、在其中的一些实施例中,若所述目标点的数量多于预设数,则根据所述目标点和所述目标车位号生成精简指引图,具体包括以下步骤:
20、生成m-1条等长的线段;
21、将若干相邻的所述目标点对应的所述标识车位号添加图形边框并分别分配于若干所述线段的两端,并将存在相同的所述标识车位号的所述线段的端点进行连接;
22、将若干所述方向车位号添加图形边框并分别分配于相应的所述线段,并基于所述方向车位号对应的移动方向调整所述线段的方向;
23、生成由若干所述线段组成且带有转弯角度的所述精简指引图,其中,所述精简指引图中的每条所述线段两端显示有所述标识车位号,且所述线段上显示有所述方向车位号。
24、在其中的一些实施例中,若所述目标点的数量少于预设数,则根据所述目标点和所述目标车位号生成精简指引信息,具体包括以下步骤:
25、生成m-1个空白引导向量组;
26、将若干相邻的所述目标点对应的所述标识车位号分别分配于所述空白引导向量组中以得到若干第一引导向量组,将若干所述第一引导向量组以所述初始点车位号在最前、所述停车点车位号在最后且相同的所述标识车位号相邻的顺序进行排序;
27、将若干所述方向车位号分别分配于所述第一引导向量组中的两个所述标识车位号之间以得到若干第二引导向量组;
28、在若干所述第二引导向量组之间添加第一间隔符,在所述第二引导向量组中的车位号之间添加第二间隔符;
29、基于若干所述第二引导向量组生成所述精简引导信息。
30、在其中的一些实施例中,将若干所述方向车位号分别分配于所述第一引导向量组中的两个所述标识车位号之间以得到若干第二引导向量组,还包括以下步骤:
31、基于所述方向车位号对应的移动方向生成相应的箭头标识符,所述箭头标识符表征为车主在各所述标识车位号的位置上需要转弯的方向,所述箭头标识符始终朝向所述移动方向;
32、将所述箭头标识符添加至相应的所述方向车位号的一端。
33、在其中的一些实施例中,生成所述精简指引图或生成所述精简指引信息后,还包括以下步骤:
34、生成初始运动提醒信息并一同发送至所述车主端,所述初始运动提醒信息用于提醒车主以朝向或背对所述初始点车位号对应的车位以开始寻车。
35、在其中的一些实施例中,生成所述精简指引图或生成所述精简指引信息后,还包括以下步骤:
36、在每个所述标识车位号上添加可点击指令;
37、等待获取所述车主端发出的与所述可点击指令匹配的点击命令,基于所述点击命令对相应的所述标识车位号进行变化处理,所述变化处理包括模糊处理、标记处理。
38、第二方面,本技术提供一种智能车库寻车系统,采用如下的技术方案:
39、一种智能车库寻车系统,包括:
40、端点获取模块,用于获取车主端发送的停车点车位号和起始点车位号;
41、平面地图规划模块,用于将所述停车点车位号和所述起始点车位号代入预设的车库平面地图中以获取寻车路径;
42、目标点选定模块,用于根据所述寻车路径的移动方向在所述寻车路径中依次寻找并选定目标点,所述目标点的类型包括路径起点、路径终点和路径转弯点;
43、目标车位号选定模块,根据所述寻车路径的移动方向在若干所述目标点上寻找并选定目标车位号,其中所述目标车位号包括标识车位号和方向车位号,所述标识车位号用于提醒车主进行移动状态的改变,所述方向车位号上承载移动方向且用于表示车主需要的移动方向;
44、精简指引生成模块,用于提取所述目标点和所述目标车位号,并基于所述目标点的数量选择根据所述目标点和所述目标车位号生成精简指引图或生成精简指引信息以发送所述车主端。
45、通过本技术实施例的技术方案,存在以下技术效果:
46、通过获取目标点和目标车位号这两个重要参数,得到寻车指引中最重要且仅需要的两个指引信息:何时转弯以及向哪转弯,并通过目标点和目标车位号生成精简指引内容,其上不存在寻车路线以外的其他路线、不存在地下车库中的其他车位号信息等会使车主查看指引时会造成视觉影响的无关信息,车主只需要通过标识车位号得知从哪里出发、在哪里进行转弯,并通过方向车位号得知向哪个方向进行转弯即可实现指引过程,这样在复杂的地下车库中,车主可以用显示面积较小的移动车位获取精简、清晰的指引内容,同时需要不需要在每次生成指引内容时花费过多的算力将所有的车库内信息都显示渲染出来。
本文地址:https://www.jishuxx.com/zhuanli/20241106/322608.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表