基于车路协同技术的行车安全信息主动推送系统的制作方法
- 国知局
- 2024-10-21 15:19:22
本发明涉及车辆安全,具体涉及基于车路协同技术的行车安全信息主动推送系统。
背景技术:
1、车路协同技术是一种通过车辆与道路基础设施之间的信息交流与互动,实现交通流量优化和智能化交通系统高效运行的技术。该技术以信息通信技术为基础,通过与车辆设备的互联互通,实现车辆与道路交通管理中心之间的实时数据共享和交流。该技术利用车载传感器、路侧传感器以及通信技术等手段,实时采集和传输车辆行驶状态、道路状况等信息,通过数据分析和处理,为交通管理人员提供准确的交通状况分析和预测,从而快速调控交通流量,提高交通效率。
2、现有技术中的行车安全信息主动推送系统能够做到根据道路拥堵情况以及前方车辆发生事故等情况为通过该区域的车辆推送安全驾驶预警信息,从而帮助驾驶员做出适当措施规避风险,但其难以根据车辆自身制动方面的性能以及车辆的距离来做出针对性的预警,无法为驾驶员提供有效且多样化地预防措施推荐,导致实际预警效果不佳,存在一定缺陷。
技术实现思路
1、针对现有技术所存在的上述缺点,本发明提供了基于车路协同技术的行车安全信息主动推送系统,能够有效解决现有技术中难以根据车辆的制动性能以及距离为车辆提供多样化且具有针对性的预警的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:
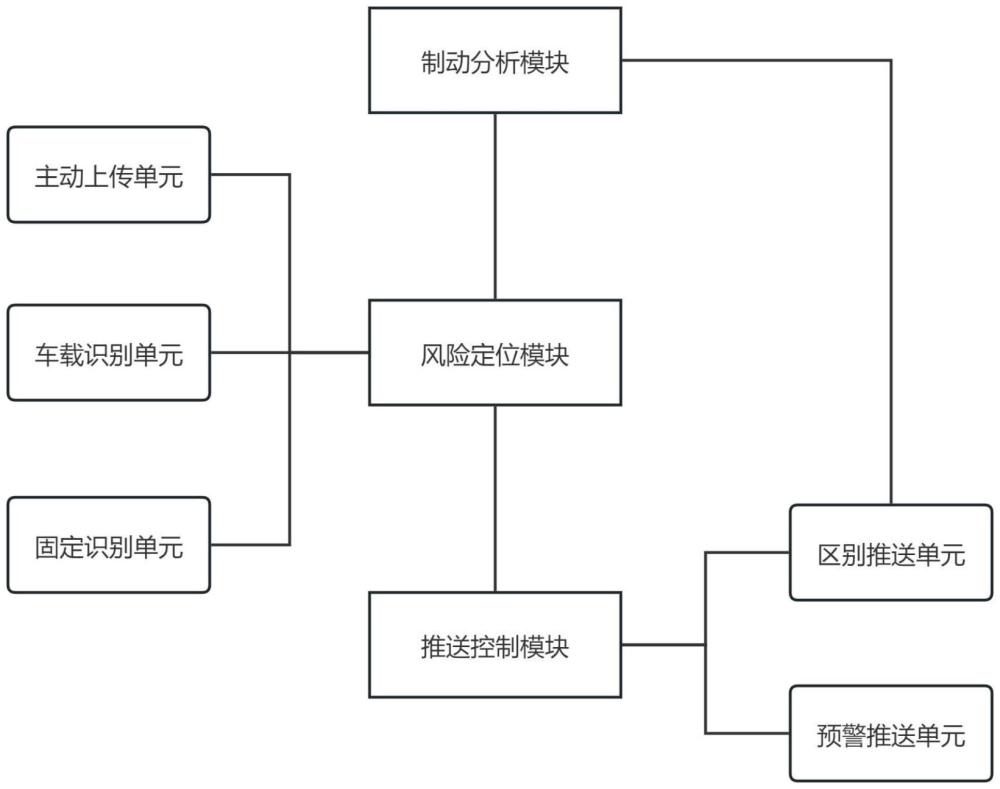
3、本发明提供基于车路协同技术的行车安全信息主动推送系统,至少包括:制动分析模块、风险定位模块和推送控制模块;
4、制动分析模块针对单个车辆进行独立分析,并将所分析的单个车辆记作目标车辆,根据目标车辆所属的类型对目标车辆影响制动能力的数据进行区别分析,计算得到反映目标车辆制动能力的制动影响值;
5、风险定位模块包括主动上传单元、车载识别单元和固定识别单元,主动上传单元获取用户及管理员上传的风险点位数据并对上传数据进行分析筛选确定实际风险定位坐标,车载识别单元获取车辆自身监测的行驶数据并对其进行记录分析识别出风险点位并确定实际风险定位坐标,固定识别单元在道路两端设置有测速设备监测车辆通过该道路的数据并进一步分析计算确定实际风险定位坐标,通过实际风险定位坐标确定道路上的风险发生地点;
6、推送控制模块包括预警推送单元和区别推送单元,预警推送单元根据实际风险定位坐标位置及其所属的道路对其周围的车辆统一推送预警信息,区别推送单元获取不同车辆的制动影响值以及离实际风险定位坐标位置的距离,分析得出用于判断预警等级的预警影响值,根据选择预警等级的不同输出不同的预警推荐控制指令。
7、进一步地,所述制动分析模块分析过程如下:
8、获取目标车辆的多个出厂数据,多个出厂数据包括制动器衬片的摩擦系数μcp、制动器衬片的有效面积scp、轮胎滚动阻力等级以及轮胎湿滑路面抓地力等级,设定一个滚阻值gd和抓地值zd,根据轮胎滚动阻力等级和轮胎湿滑路面抓地力等级为滚阻值和抓地值进行赋值,赋值越大则等级越高,对目标车辆进行类型划分,将目标车辆划分为微轻型车、中重型车,根据不同类型的目标车辆进行区别分析;
9、当目标车辆为微轻型车时,获取车辆的整备质量座位数量num以及满载重量代入公式中进行计算,得到目标车辆的用途判断值pd1,其中
10、为预设的重量系数,预设有用途判断阈值pd1,当目标车辆的用途判断值小于等于用途判断阈值pd1时,将其判定为载客用车,对其整备质量座位数量num、制动器衬片的摩擦系数μcp、制动器衬片的有效面积scp、滚阻值gd和抓地值zd进行归一化处理并代入公式中进行计算,得到该目标车辆的制动影响值br;当目标车辆的用途判断值大于用途判断阈值pd1′时,将其判定为载货用车,对其满载重量制动器衬片的摩擦系数μcp、制动器衬片的有效面积scp、滚阻值gd和抓地值zd进行归一化处理并代入公式中进行计算,得到该目标车辆的制动影响值br,其中λ1、λ2均为预设的常数系数;
11、当目标车辆为中重型车时,获取目标车辆的满载重量对目标车辆的满载重量制动器衬片的摩擦系数μcp、制动器衬片的有效面积scp、滚阻值gd和抓地值zd进行归一化处理,代入公式中进行计算,得到该目标车辆的制动影响值br,其中λ3为预设的常数系数且λ3=λ1+λ2。
12、进一步地,所述主动上传单元确定实际风险定位坐标过程如下:
13、获取所有用户上传的风险坐标,风险坐标为用户移动终端的定位坐标,设定一个时间范围值δt和一个距离范围值r0,设用户上传数据的时刻为t0,以风险坐标为圆心距离范围值r0为半径绘制一个区域圆,获取区域圆范围内在时间区间[t0-δt,t0]内所上传的风险坐标次数记作风险判断值n并将所有风险坐标记作判断坐标,设定一个风险判断阈值,当风险判断值大于等于风险判断阈值时,计算所有判断坐标的经度平均值a以及纬度平均值b得到中心坐标(a,b),获取每个判断坐标上传时上传用户的路线数据并选取重合段记作重合路线,在重合路线上确定出中心坐标的最近点,以最近点的坐标数据作为实际风险定位坐标;
14、获取管理员上传的风险坐标并记作实际风险定位坐标。
15、进一步地,所述车载识别单元设置在车辆内部,其识别风险过程如下:
16、获取车辆行驶速度、车辆加速度以及车辆当前路段限速值,设定一个限速阈值,将限速值大于限速阈值的当前路段记作监控路段,在车辆进入监控路段时对车辆行驶速度进行记录分析;
17、定期记录车辆行驶速度并绘制行驶速度随时间变化折线图,设定一个监测时长范围值δt,当车辆行驶速度等于0时,设当前时刻为t0,获取时间区间[t0-δt,t0]范围内车辆加速度的最大值记作加速峰值gmax,截取时间区间[t0,t0-k*δt]范围内的行驶速度随时间变化折线图并计算折线与时间轴所围成的图形面积记作移动距离sm,其中k为预设的倍率系数且满足k*δt大于等于10分钟,当同时满足gmax≥g′、sm≤s′时,将该车辆定位坐标记作实际风险定位坐标。
18、进一步地,所述固定识别单元将无分岔路的道路记作监测道路,在监测道路的两端设置有用于监测车辆牌照以及速度的测速设备,按照车辆牌照对车辆进行区分并将驶入监测道路的车辆记作驶入车辆,计算驶入车辆驶入监测道路时的速度记作v,代入公式tsr=sjcv中进行计算,得到该驶入车辆的预计时间tsr,其中sjc为监测道路的路程长度,当驶入车辆在时间范围tsr+δtsr内未驶出监测道路时,将该驶入车辆记作问题车辆,其中δtsr为过往24小时内车辆的平均通过时长的二分之一,当问题车辆数量大于等于2时,获取最先驶入监测道路内的问题车辆的车辆位置坐标作为实际风险定位坐标。
19、进一步地,所述预警推送单元将实际风险定位坐标所属的道路均记作风险道路,获取每个风险道路的行驶方向,设定一个预警距离l,当风险道路为双向道路时,以实际风险定位坐标位置为中心点向风险道路两侧距离为l的道路范围内的车辆发送预警信号;当风险道路为单向道路时,向朝向实际风险定位坐标位置移动的且距离实际风险定位坐标位置小于等于l的车辆发送预警信号。
20、进一步地,所述区别推送单元预警控制过程具体如下:
21、将所有接收预警信号的车辆记作推送车辆,获取所有推送车辆的车辆位置信息,计算推送车辆的车辆位置距离实际风险定位坐标位置的路径距离记作ljl,获取推送车辆的制动影响值br,共同代入公式中进行计算,得到预警影响值其中η为预设的常数系数,预设有三个预警分界值分别为当预警影响值小于等于大于等于0时,生成四级预警信号;当预警影响值小于等于大于等于时,生成三级预警信号;当预警影响值小于等于大于等于时,生成二级预警信号;当预警影响值大于等于时,生成一级预警信号。
22、本发明提供的技术方案,与已知的现有技术相比,具有如下有益效果:
23、1、本发明制动分析模块能够对作为微轻型车的目标车辆进行载货、载人用途识别,根据用途不同选用不同的公式对其制动影响值进行计算,相较于不区分直接计算,区分计算出来的结果更加贴合目标车辆日常使用过程中的使用场景,并且综合目标车辆的多个数据计算得出的制动影响值能够被用于目标车辆制动能力的判断,相较于单个数据的分析,能够更加准确地对车辆制动性能进行侧面评估,并且给定不同常数系数用以计算,以便于各类车型后续的定量分析。
24、2、本发明风险定位模块通过多种手段来获取实际风险定位坐标,实现多渠道的数据上传及智能识别,相较于定点监控一种监测方式,提升了发现风险位置的能力,并且推送控制模块能够对一定范围内的车辆统一预警提升驾驶员警惕性的同时,根据车辆自身制动性能以及距离危险所在位置的距离,来对不同车辆采取分层发送不同等级的预警信号,并提醒驾驶员采用不同程度的应对措施,以降低车流整体的速度,相较于统一发送相同指令,更好地降低统一实施过程中的意外发生概率,能够有效规避、减少急刹所造成的事故,从而使得经过危险位置的车辆能够安全且有序地减速通过。
本文地址:https://www.jishuxx.com/zhuanli/20241021/321215.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表