一种基于人工智能的高速公路交通状况检测系统的制作方法
- 国知局
- 2024-11-06 14:24:44
本发明涉及交通状况检测,更具体地说,它涉及一种基于人工智能的高速公路交通状况检测系统。
背景技术:
1、在高速公路上车辆的行驶速度普遍较快,一旦发生异常情况,如突发的交通事故、路面损坏或者恶劣天气情况导致的视线受阻,后方车辆若不能及时获取异常情况信息并采取有效措施,极易发生连环追尾等二次事故,在此类紧急情况下,迅速实施有效的交通管制措施,例如道路引流和车辆限速等,对于预防后续事故的发生至关重要。
2、针对上述内容,现有利用摄像头和激光雷达来捕捉车辆周边环境信息,通过智能驾驶技术及时获取异常情况信息并采取有效措施,例如紧急刹车和换道等;然而,现有的智能驾驶技术受制于摄像头和激光雷达的探测范围,通常只能进行短时轨迹预测以及短距离路况识别,缺乏提前长时间对交通态势的全面分析能力,导致无法及时为后方车辆迅速实施有效的交通管制措施。
技术实现思路
1、本发明提供一种基于人工智能的高速公路交通状况检测系统,解决相关技术中现有的智能驾驶技术缺乏提前长时间对交通态势的全面分析能力,导致无法及时为后方车辆迅速实施有效的交通管制措施的技术问题。
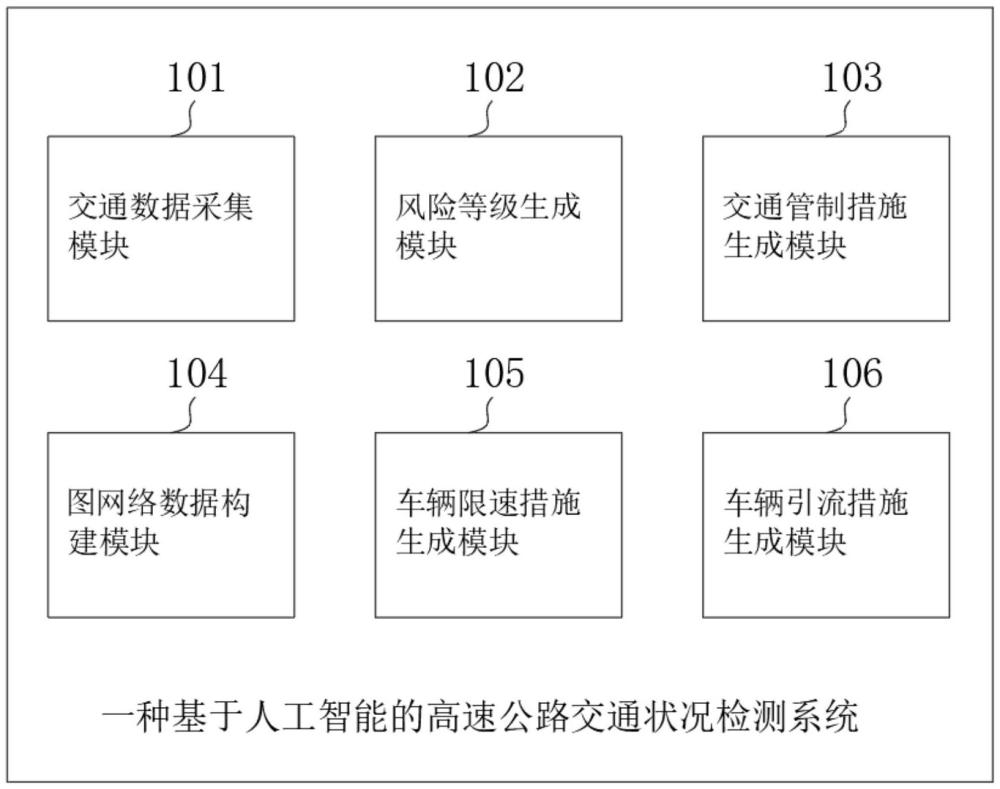
2、本发明提供了一种基于人工智能的高速公路交通状况检测系统,包括:
3、交通数据采集模块,其用于在预设时间段t内,按照预设时间间隔t采集监测区域内的交通数据,并生成特征序列;
4、特征序列包括n个序列单元,第i个序列单元表示第i个时间点的交通数据,其中n=t/t,1≤i≤n;交通数据包括:车流量、车辆密集度和天气情况;
5、风险等级生成模块,其用于将特征序列输入到风险评估模型,输出的值表示监测区域内的风险等级;风险等级包括:低风险等级、中风险等级和高风险等级;
6、交通管制措施生成模块,其用于根据监测区域内的风险等级为管制区域内的每个车辆生成交通管制措施;
7、低风险等级不生成交通管制措施;
8、中风险等级对应的交通管制措施为车辆限速措施;
9、高风险等级对应的交通管制措施为车辆引流措施;
10、图网络数据构建模块,其用于采集管制区域内的每个车辆的行驶数据,并构建图网络数据;
11、图网络数据包括:节点、节点的初始特征和节点之间的边;节点与管制区域内的每个车辆建立数据映射;节点的初始特征根据节点所数据映射的车辆的行驶数据表示;行驶数据包括:车辆类型、所处车道最高限速、车速和加速度;
12、车辆限速措施生成模块,其用于将图网络数据输入到第一预测模型,输出车辆限速措施;车辆限速措施表示管制区域内的每个车辆的最高时速;
13、车辆引流措施生成模块,其用于将图网络数据输入到第二预测模型,输出车辆引流措施;车辆引流措施表示管制区域内的每个车辆的换道位置,其中换道位置通过经度和纬度表示。
14、进一步地,车流量表示在监测区域内的车辆数量;车辆密集度等于车流量除以监测区域的面积;天气情况包括:降雨量、降雪量、能见度和天气类型,其中天气类型包括:晴天、雨天、雪天和雾霾,天气类型通过实数编码表示。
15、进一步地,监测区域和管制区域均为矩形区域,监测区域和管制区域相邻,监测区域和管制区域的宽度均为车道宽度;
16、监测区域的长度lmonitor的计算公式包括:
17、lmonitor=speedmax*timereact+disbrake;
18、
19、其中speedmax表示监测区域内车辆的最大速度,timereact表示驾驶员的反应时间,timereact为固定值2秒,disbrake表示在监测区域内车辆的最大速度下的制动距离,accbrake在监测区域内车辆的最大速度下的制动加速度,其中disbrake和accbrake均为自定义参数;
20、管制区域的长度lcontrol的计算公式如下:
21、lcontrol=speedmax*timeadjust;
22、其中timeadjust表示监测区域内车辆的最大速度减速至0的时间,并且timeadjust为自定义参数。
23、进一步地,风险评估模型包括n个时间步,第i个时间步输入特征序列的第i个序列单元,输出隐藏状态;
24、第n个时间步输出的隐藏状态输入到第一分类器,第一分类器的分类空间表示监测区域内的风险等级;
25、用于训练风险评估模型的训练样本的样本标签通过相关技术专家标注的方式获得。
26、进一步地,风险评估模型的计算公式包括:
27、
28、hi=tanh(w2*xi+w3*(gi⊙hi-1)+b2);
29、gi=simgoid(w4*xi+w5*hi-1+b3);
30、其中表示第i个时间步输出的隐藏状态,xi表示第i个时间步输入的特征序列的第i个序列单元,hi和gi分别表示第i个时间步的候选隐藏状态和门控单元,hi-1表示第i-1个时间步的候选隐藏状态,xk表示第k个时间步输入的特征序列的第k个序列单元,w1、w2、w3、w4和w5分别表示第一权重参数、第二权重参数、第三权重参数、第四权重参数和第五权重参数,b1、b2和b3分别表示第一偏置参数、第二偏置参数和第三偏置参数,concat表示拼接操作,mlp表示多层感知机,⊙表示逐元素乘法,tanh表示双曲正切激活函数,sigmoid表示sigmoid激活函数。
31、进一步地,以每个节点所数据映射的车辆为中心,预设距离为半径生成扫描区域,扫描区域内的所有车辆对应的节点之间构建边,其中预设距离为自定义参数。
32、进一步地,第一预测模型包括:第一隐藏层、第一提取层和第二分类器;
33、第一隐藏层输入图网络数据,输出第一图更新矩阵;
34、第一图更新矩阵的一个行向量表示一个节点的第一更新特征;
35、第一提取层用于提取第一图更新矩阵的每个节点的第一更新特征输入到第二分类器,第二分类器的分类空间表示车辆的最高时速;
36、第一隐藏层的计算公式包括:
37、
38、其中s1表示第一图更新矩阵,表示第u个节点的第一更新特征,colu表示与第u个节点存在边连接的节点的集合,hu和hv分别表示第u个节点和第v个节点的初始特征,u1表示第一隐藏层对应的第一权重参数,表示第u个节点和第v个节点之间的第一距离系数,disuv表示第u个节点所数据映射的车辆与第v个节点所数据映射的车辆之间的欧式距离,pile表示堆叠操作,concat表示拼接操作,mlp表示多层感知机,e表示自然常数,σ表示高斯核的标准差。
39、进一步地,通过模拟仿真平台获得用于训练第一预测模型的训练样本的样本标签,包括以下步骤:
40、步骤s201,通过模拟仿真平台为管制区域内的每个车辆生成符合车辆所在车道的车速范围内的时速;
41、步骤s202,在时间阈值内将未到达监测区域的中心点的车辆的时速作为一个训练样本的样本标签,其中时间阈值为自定义参数;
42、步骤s203,重复步骤s201和步骤s202,直至获得p个训练样本,其中p为自定义参数。
43、进一步地,第二预测模型包括:第二隐藏层、第二提取层、第三分类器和转换层;
44、第二隐藏层输入图网络数据,输出第二图更新矩阵;
45、第二图更新矩阵的一个行向量表示一个节点的第二更新特征;
46、第二提取层用于提取第二图更新矩阵的每个节点的第二更新特征输入到第三分类器,第三分类器的分类空间表示车辆的换道位置与交通数据采集点的欧式距离;
47、转换层用于根据交通数据采集点的经纬度将车辆的换道位置与交通数据采集点的欧式距离转换为经度和纬度表示;
48、第二隐藏层的计算公式包括:
49、
50、其中s2表示第二图更新矩阵,表示第u个节点的第二更新特征,colu表示与第u个节点存在边连接的节点的集合,hu和hv分别表示第u个节点和第v个节点的初始特征,u2表示第二隐藏层对应的第二权重参数,表示第u个节点和第v个节点之间的第二距离系数,disuv表示第u个节点所数据映射的车辆与第v个节点所数据映射的车辆之间的欧式距离,dismin和dismax表示节点所数据映射的车辆之间的欧式距离的最小值和最大值,sattion表示自注意力机制函数,pile表示堆叠操作,concat表示拼接操作。
51、进一步地,通过模拟仿真平台获得用于训练第二预测模型的训练样本的样本标签,包括以下步骤:
52、步骤s301,通过模拟仿真平台随机生成管制区域内的每个车辆的换道位置;
53、步骤s302,判断每个车辆的换道位置之间的欧式距离小于距离阈值,则将每个车辆的换道位置作为一个训练样本的样本标签,其中距离阈值为自定义参数;
54、步骤s303,重复步骤s301和步骤s302,直至获得q个训练样本,其中q为自定义参数。
55、本发明的有益效果在于:本发明通过风险评估模型检测高速公路的监测区域内的风险等级,并通过第一预测模型和第二预测模型对管制区域的每个车辆的驾驶数据进行综合分析,分别为管制区域的每个车辆生成有效的交通管制措施,从而保障车辆的驾驶安全。
本文地址:https://www.jishuxx.com/zhuanli/20241106/321907.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表