一种隧道入口区域异质车辆事件触发策略
- 国知局
- 2024-11-18 18:14:36
本发明属于智能交通领域,具体涉及一种隧道入口区域异质车辆事件触发策略。
背景技术:
1、因内外突变的行车环境和条件,公路隧道入口区域车辆行驶行为复杂,交通问题突出。随着车联网技术的发展,路侧设备可以向网联人驾车(connectedhuman-drivenvehicles,chv)发送控制信息,使得车辆在隧道入口区域协同行驶,从而改善隧道入口区域的交通状况。然而,受经济等因素的制约,由传统人驾车(human-drivenvehicles,hv)和chv组成的混合交通将长期存在,由于hv和chv在通信、感知方面存在差异,混合交通条件下该区域车辆作用关系更为复杂。此外,chv改善隧道入口区域交通状况的能力,很大程度上来源于路侧设备对chv施加的网联控制,这一过程需要消耗大量的计算及通信资源。事实上,并非所有的chv都需要路侧设备的实时控制。因此,建立隧道入口区域异质车辆协同行驶模型,并提出相应的事件触发策略,有利于在提高隧道入口区域交通效率的同时,节省路侧设备的计算和通信资源。
2、通过查阅相关专利和论文发现,目前少有专利针对在隧道入口区域的传统人驾车和网联人驾车组成的混合交通的控制策略进行研究。专利cn117236017a公开了一种基于社会力模型的隧道入口区域网联人驾车协同行驶建模方法,建立了网联人驾车在隧道入口区域的车车协同行驶模型。但是该方法无法刻画异质车辆在隧道入口区域的行驶规律,并且无法节省路侧设备的计算和通信资源。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种隧道入口区域异质车辆事件触发策略,本发明旨在解决现有方法计算及通信资源消耗大,难以刻画异质车辆在隧道入口区域行驶规律的问题。
2、本发明提供了一种隧道入口区域异质车辆事件触发策略,包括以下步骤:
3、s1.建立隧道入口区域网联人驾车行驶模型;
4、s2.建立隧道入口区域异质车辆协同行驶模型;
5、s3.设计异质车辆事件触发策略。
6、进一步,所述步骤s1的具体内容为:从社会力的角度构建隧道入口区域的网联人驾车行驶模型,即通过车辆驾驶过程中受到的自驱动力、车辆间的排斥力、隧道的势场力以及网联控制作用力刻画隧道入口区域的网联人驾车动力学行为;
7、i.自驱动力的计算表达式为:
8、
9、式中,的正方向为隧道外指向隧道内;mn是第n辆车的质量;an是车辆期望的最大加速度;是第n辆车在时刻t的位置;vmax是道路的限速值,当车辆在隧道外时,vmax是隧道外的限速,当车辆在隧道内时,vmax是隧道内的限速;
10、ii.车辆间的排斥力的计算表达式为:
11、
12、sn,chv(t)=xn-1(t)-xn(t)
13、
14、式中,的正方向为隧道外指向隧道内;sn(t)是第n辆车和前车n-1的车间距;是第n辆车的期望车间距;tn是期望的车头时距;xn(t)是第n辆车在时刻t的位置;s0是最小车头间距;b是车辆期望的最小减速度;δvn(t)=vn(t)-vn-1(t),是第n辆车和第n-1辆车的速度差;和分别是chv对车间距和速度差的通信时延;
15、iii.隧道的势场力的计算表达式为:
16、
17、
18、式中,隧道势场的正方向为隧道外指向隧道内;ktun是隧道入口区域的势场系数;d是车辆的坐标;d0是当车辆在隧道入口减速段减速度最大时的坐标;σx是与车辆减速路程长短相关的系数;vn(t)是车辆的速度;vlimit是隧道内部的限速值;
19、iv.网联控制作用力的计算表达式为:
20、
21、
22、式中,αl表示第n-l辆车对目标车辆影响的权重系数,目标车辆前方k辆车对目标车辆影响的权重系数和为1,且距离目标车辆越近,权重系数越大;c是控制系数;k表示目标车辆能获得的前车信息的车辆数;δvn-l,n(t)=vn-l(t)-vn(t),表示第n-l辆车和第n辆车的速度差;是chv对多前车速度差信息的通信时延。
23、进一步,所述步骤s2包括以下子步骤:
24、s2.1建立传统人驾车的模型;
25、
26、
27、
28、
29、
30、式中,和分别表示驾驶员感知到的本车的速度、与前车的车间距和速度差;和分别是hv对车间距和车速差的感知时延;
31、s2.2对于有n辆车的异质车辆队列,用邻接矩阵刻画异质车辆间的通信拓扑结构,表达式如下:
32、
33、
34、式中,in是n维的单位矩阵;ξn=diag{ξ11,ξ22,…,ξnn}表示异质车辆中的车辆类型,ξnn=1表示第n辆车是chv,ξnn=0表示第n辆车是hv;
35、s2.3结合异质车辆间的通信拓扑关系,建立隧道入口区域异质车辆协同行驶模型;
36、
37、式中,ξnn表示异质车辆的车辆类型,ξnn=1表示第n辆车是chv,ξnn=0表示第n辆车是hv。
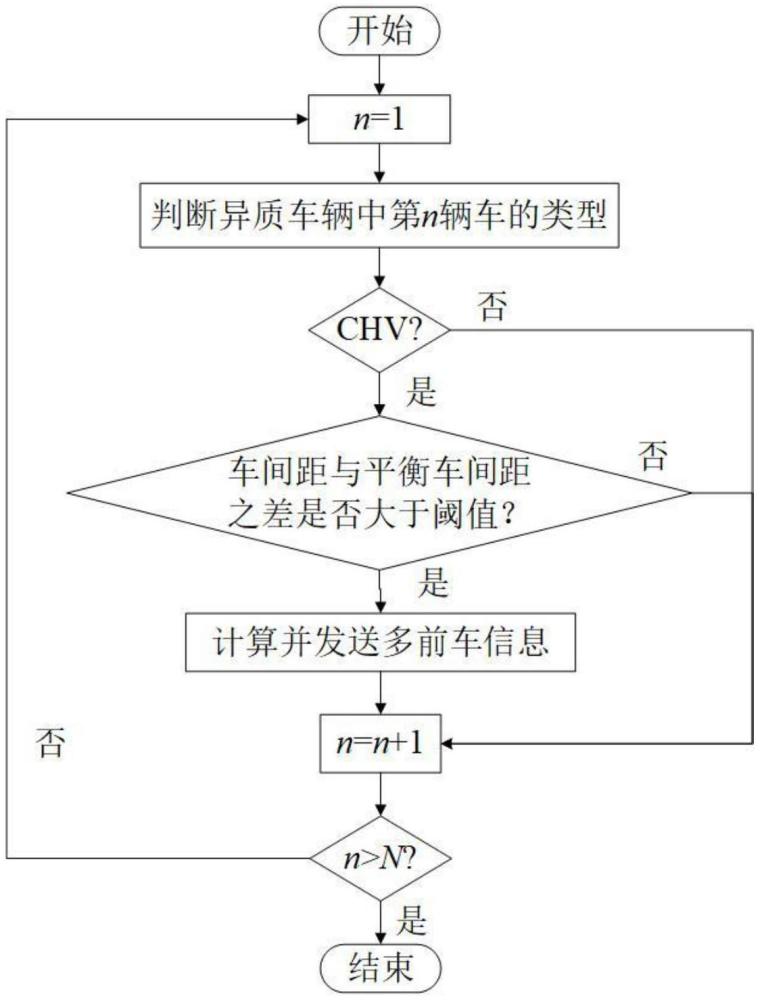
38、进一步,所述步骤s3中的异质车辆事件触发策略为:通过路侧设备采集道路上的车辆信息,并根据chv与前车的车间距和平衡车间距之间的差值,来判断是否对目标chv进行网联控制,只有当差值大于设定的阈值时,路侧设备才对目标chv进行网联控制。
39、若第n辆车是chv,则事件触发条件如下所示:
40、
41、式中,n是车辆的编号;是对第n辆车进行第u+1次控制的时刻;xn-1(t)和xn(t)分别表示第n辆车、第n-1辆车在时刻t所处的位置;se是平衡车间距,thr是触发的阈值。
42、进一步,所述触发的阈值thr=3m。
43、有益效果:
44、1、本发明根据隧道入口区域的特点,考虑chv和hv在通信和感知方面的差异,建立了隧道入口区域异质车辆协同行驶模型,使得提出的模型能够更好地刻画异质车辆在隧道入口区域的行驶规律。
45、2、本发明在隧道入口区域异质车辆协同行驶模型的基础上,进一步提出了隧道入口区域异质车辆事件触发策略,为在改善隧道入口区域交通状况的同时节省路侧设备的计算和通信资源提供了理论指导。
46、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究,对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
技术特征:1.一种隧道入口区域异质车辆事件触发策略,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种隧道入口区域异质车辆事件触发策略,其特征在于:所述步骤s1的具体内容为:从社会力的角度构建隧道入口区域的网联人驾车行驶模型,即通过车辆驾驶过程中受到的自驱动力、车辆间的排斥力、隧道的势场力以及网联控制作用力刻画隧道入口区域的网联人驾车动力学行为;
3.根据权利要求2所述的一种隧道入口区域异质车辆事件触发策略,其特征在于:所述步骤s2包括以下子步骤:
4.根据权利要求3所述的一种隧道入口区域异质车辆事件触发策略,其特征在于:所述步骤s3中的异质车辆事件触发策略为:通过路侧设备采集道路上的车辆信息,并根据chv与前车的车间距和平衡车间距之间的差值,来判断是否对目标chv进行网联控制,只有当差值大于设定的阈值时,路侧设备才对目标chv进行网联控制;
5.根据权利要求4所述的一种隧道入口区域异质车辆事件触发策略,其特征在于:所述触发的阈值thr=3m。
技术总结本发明属于智能交通领域,公开了一种隧道入口区域异质车辆事件触发策略,包括:S1.建立隧道入口区域网联人驾车行驶模型;S2.建立隧道入口区域异质车辆协同行驶模型;S3.设计异质车辆事件触发策略。本发明根据隧道入口区域的特点,考虑CHV和HV在通信和感知方面的差异,建立了隧道入口区域异质车辆协同行驶模型,使得提出的模型能够更好地刻画异质车辆在隧道入口区域的行驶规律。本发明在隧道入口区域异质车辆协同行驶模型的基础上,进一步提出了隧道入口区域异质车辆事件触发策略,为在改善隧道入口区域交通状况的同时节省路侧设备的计算和通信资源提供了理论指导。技术研发人员:赵敏,孙棣华,柴纪豪受保护的技术使用者:重庆大学技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/327765.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表