一种曲面抛光轨迹均匀覆盖方法、装置及可读存储介质
- 国知局
- 2024-11-18 18:15:55
本发明涉及抛光轨迹规划,尤其是指一种曲面抛光轨迹均匀覆盖方法、装置及计算机可读存储介质。
背景技术:
1、复杂曲面零件在航空航天和汽车等领域具有广泛应用,对曲面进行高精度加工从而得到高精度高质量的曲面零件是非常重要的。在曲面加工过程中,抛光轨迹规划与加工精度和加工效率密切相关,良好的轨迹规划能够确保抛光工具在整个加工过程中均匀覆盖并适应不同曲率和形状的区域,从而提高曲面零件的精度,因此,曲面抛光轨迹规划是对曲面进行高精度加工的重要保证。
2、现有的抛光轨迹规划方法主要包括等参数法、等截面线法和投影法,其中,等参数法是将待加工曲面使用参数u、v进行参数化表示,参数u、v通常在一个有限区间进行变化,通过u、v在有限区间内的不同取值可以生成待加工曲面上的各个点,在待加工曲面方程已知的情况下,等参数法通过提取曲面u、v任意方向的一个参数,将该参数代入曲面方程求解另一个参数,从而直接生成抛光轨迹;等截面法的原理是使用一组平行平面与待加工曲面在笛卡尔空间内相交,通过求解相应平面与待加工曲面的交线作为抛光轨迹,在实际规划过程中,需要先获取待加工曲面的曲面方程,再通过将一组平面方程与该曲面方程进行联立求解,从而获得平面与曲面交线上的坐标点作为轨迹点;等残留高度法在待加工曲面中选择一个区域,并提取该区域的边界点作为初始数据,从选定的初始数据中,根据某两个方向的坐标值生成一系列等间距的平面轨迹,之后将生成的平面轨迹与曲面方程联立,求解方程组以确定曲面上的对应轨迹点,从而得到抛光轨迹。这些抛光轨迹规划方法均需要先获取待加工曲面的曲面方程,但是对于一些复杂曲面,其数学特性难以获取,导致无法建立对应的曲面方程,因此,对于一些无法获取曲面方程的复杂曲面,现有方法均无法生成相应的抛光轨迹,从而导致无法对待加工曲面进行加工。
3、综上所述,现有的曲面抛光轨迹规划方法均需要基于待加工曲面的曲面方程才能生成抛光轨迹,对于无法获取曲面方程的复杂曲面无法生成相应的抛光轨迹,从而导致无法对待加工曲面进行加工。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中的曲面抛光轨迹规划方法均需要基于待加工曲面的曲面方程才能生成抛光轨迹,对于无法获取曲面方程的复杂曲面无法生成相应的抛光轨迹,从而导致无法对待加工曲面进行加工的问题。
2、为解决上述技术问题,本发明提供了一种曲面抛光轨迹均匀覆盖方法,包括:
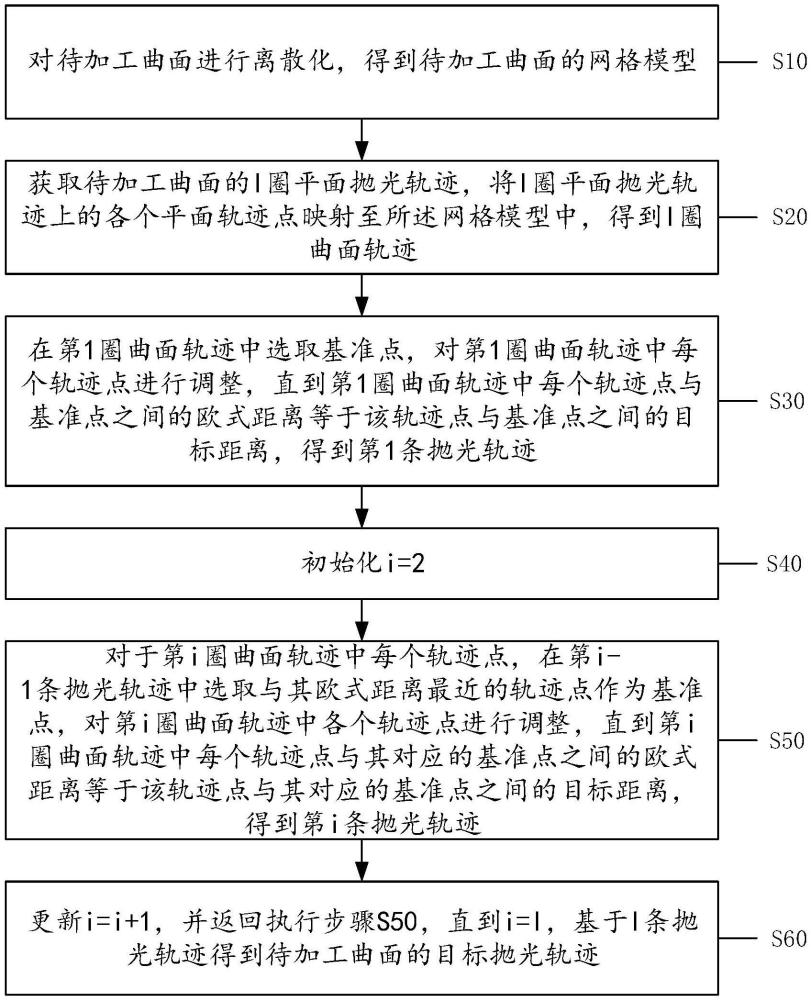
3、s10:对待加工曲面进行离散化,得到待加工曲面的网格模型;
4、s20:获取待加工曲面的i圈平面抛光轨迹,将所述i圈平面抛光轨迹上的各个平面轨迹点映射至所述网格模型中,得到i圈曲面轨迹;
5、s30:在第1圈曲面轨迹中选取基准点,对第1圈曲面轨迹中每个轨迹点进行调整,直到第1圈曲面轨迹中每个轨迹点与所述基准点之间的欧式距离等于该轨迹点与基准点之间的目标距离,得到第1条抛光轨迹;其中,若i圈曲面轨迹为对称轨迹,则将第1圈曲面轨迹中位于对称点处的轨迹点作为基准点,若i圈曲面轨迹为非对称轨迹,则将第1圈曲面轨迹中第一个轨迹点作为基准点;
6、s40:初始化i=2;
7、s50:对于第i圈曲面轨迹中每个轨迹点,在第i-1条抛光轨迹中选取与其欧式距离最近的轨迹点作为基准点,对第i圈曲面轨迹中各个轨迹点进行调整,直到第i圈曲面轨迹中每个轨迹点与其对应的基准点之间的欧式距离等于该轨迹点与其对应的基准点之间的目标距离,得到第i条抛光轨迹;
8、s60:更新i=i+1,并返回执行步骤s50,直到i=i,基于i条抛光轨迹得到待加工曲面的目标抛光轨迹;
9、其中,轨迹点与基准点之间的目标距离为轨迹点处的抛光接触圆半径、轨迹点对应的基准点处的抛光接触圆半径和预设抛光轨迹重叠量之差的绝对值。
10、优选地,步骤s10还包括:提取所述网格模型中各个三角形网格的顶点坐标,并计算各个三角形网格的面积和单位法向量。
11、优选地,轨迹点处的抛光接触圆半径的计算步骤包括:
12、步骤1:将轨迹点所在三角形网格作为目标三角形网格,并初始化m=1;
13、步骤2:将目标三角形网格中第m个顶点作为目标顶点,基于网格模型中以目标顶点为公共顶点的三角形网格的面积和单位法向量,计算目标顶点的平均单位法向量;
14、步骤3:获取待加工曲面在目标顶点处的切平面,并基于目标顶点的平均单位法向量,计算目标三角形网格中除目标顶点外任一顶点与目标顶点之间的曲线投影至所述切平面上的单位切向量;
15、步骤4:基于目标顶点的平均单位法向量、目标三角形网格中除目标顶点外任一顶点与目标顶点之间的曲线和所述目标顶点的坐标,计算目标顶点沿所述单位切向量方向的法曲率;
16、步骤5:基于目标顶点的平均单位法向量和目标顶点沿所述单位切向量方向的法曲率,构造曲率张量;并基于曲率张量的第一特征值和第二特征值计算目标顶点处的高斯曲率和平均曲率;
17、步骤6:基于目标顶点处的高斯曲率和平均曲率计算目标顶点处的曲面主曲率和曲面副曲率;
18、步骤7:更新m=m+1,并返回执行步骤2,直到m=3,得到目标三角形网格中各个顶点处的曲面主曲率和曲面副曲率;
19、步骤8:基于轨迹点与目标三角形网格中各个顶点组成的子三角形的面积、目标三角形网格的面积、目标三角形网格中各个顶点处的曲面主曲率和曲面副曲率,计算轨迹点处的曲面主曲率和曲面副曲率;
20、步骤9:基于轨迹点处的曲面主曲率和曲面副曲率、抛光工具的主曲率和副曲率,计算轨迹点处的抛光接触圆半径。
21、优选地,目标顶点的平均单位法向量的计算公式为:
22、
23、其中,n表示目标顶点的平均单位法向量;ag表示以目标顶点为公共顶点的第g个三角形网格的面积;ng表示以目标顶点为公共顶点的第g个三角形网格的单位法向量;
24、目标三角形网格中除目标顶点外任一顶点与目标顶点之间的曲线投影至所述切平面上的单位切向量的计算公式为:
25、
26、其中,t表示目标三角形网格中除目标顶点外任一顶点与目标顶点之间的曲线投影至所述切平面上的单位切向量;ov表示目标顶点o与目标三角形网格中的顶点v组成的向量;
27、目标顶点沿所述单位切向量方向的法曲率的计算公式为:
28、
29、其中,kn(t)表示目标顶点沿单位切向量t方向的法曲率;r(c)表示目标顶点o与目标三角形网格中的顶点v之间的曲线;
30、曲率张量表示为:
31、l=kn(t)(i-nnt),
32、其中,l表示曲率张量;i表示单位矩阵;t表示矩阵的转置;
33、目标顶点处的高斯曲率和平均曲率的计算公式为:
34、
35、其中,kg表示目标顶点处的高斯曲率;h表示目标顶点处的平均曲率;λ1表示曲率张量的第一特征值;λ2表示曲率张量的第二特征值;
36、目标顶点处的曲面主曲率和曲面副曲率的计算公式为:
37、
38、其中,k1表示目标顶点处的曲面主曲率;k2表示目标顶点处的曲面副曲率;
39、轨迹点处的曲面主曲率和曲面副曲率的计算公式为:
40、
41、其中,k1表示轨迹点处的曲面主曲率;k2表示轨迹点处的曲面副曲率;τa表示轨迹点与目标三角形网格中顶点a和顶点b组成的子三角形面积与目标三角形网格面积的比值;k1a表示目标三角形网格中顶点a处的曲面主曲率;τb表示轨迹点与目标三角形网格中顶点b和顶点c组成的子三角形面积与目标三角形网格面积的比值;k1b表示目标三角形网格中顶点b处的曲面主曲率;τc表示轨迹点与目标三角形网格中顶点c和顶点a组成的子三角形面积与目标三角形网格面积的比值;k1c表示目标三角形网格中顶点c处的曲面主曲率;k2a表示目标三角形网格中顶点a处的曲面副曲率;k2b表示目标三角形网格中顶点b处的曲面副曲率;k2c表示目标三角形网格中顶点c处的曲面副曲率;
42、轨迹点处的抛光接触圆半径的计算公式为:
43、a=(3h2εqr/πe)1/3,
44、其中,a表示轨迹点处的抛光接触圆半径;h表示第一经验系数;ε表示第二经验系数;q表示施加在待加工曲面上的抛光力;r表示曲率系数,等于抛光工具的主曲率、副曲率、轨迹点处的曲面主曲率和曲面负曲率之和的倒数;e表示等效弹性模量。
45、优选地,目标距离的计算公式为:
46、d=|am-an-j|,
47、其中,d表示目标距离;am表示轨迹点m处的抛光接触圆半径;an表示轨迹点m对应的基准点n处的抛光接触圆半径;j表示预设抛光轨迹重叠量。
48、优选地,对轨迹点进行调整包括:
49、计算轨迹点与基准点之间的欧式距离,并判断所述欧式距离是否等于所述轨迹点与所述基准点之间的目标距离;
50、若所述欧式距离不等于所述目标距离,则基于所述轨迹点和所述基准点之间的连线、所述轨迹点所在三角形网格的单位法向量张成一个平面;
51、在所述轨迹点和所述基准点之间的连线内部或延长线上选取一个目标点,以所述基准点为圆心、所述目标点与所述基准点之间的距离为半径,在张成的平面内生成一个圆;
52、获取生成的圆与待加工曲面的所有交点,并将与所述轨迹点的欧式距离最小的交点作为目标轨迹点。
53、优选地,将与所述轨迹点的欧式距离最小的交点作为目标轨迹点后还包括:
54、计算所述目标轨迹点的抛光接触半径、所述目标轨迹点与所述基准点之间的欧式距离以及所述目标轨迹点与所述基准点之间的目标距离;
55、判断所述目标轨迹点与所述基准点之间的欧式距离是否等于所述目标轨迹点与所述基准点之间的目标距离,若不等于,则重新对所述目标轨迹点进行调整。
56、优选地,在所述轨迹点和所述基准点之间的连线内部或延长线上选取一个目标点包括:
57、若所述轨迹点与所述基准点之间的欧式距离大于所述轨迹点与所述基准点之间的目标距离,则在所述轨迹点和所述基准点之间的连线延长线上选取一个目标点;
58、若所述轨迹点与所述基准点之间的欧式距离小于所述轨迹点与所述基准点之间的目标距离,则在所述轨迹点和所述基准点之间的连线内部选取一个目标点。
59、本发明还提供了一种曲面抛光轨迹均匀覆盖装置,包括:
60、曲面离散化模块,用于对待加工曲面进行离散化,得到待加工曲面的网格模型;
61、轨迹映射模块,用于获取待加工曲面的i圈平面抛光轨迹,将所述i圈平面抛光轨迹上的各个平面轨迹点映射至所述网格模型中,得到i圈曲面轨迹;
62、第一轨迹调整模块,用于在第1圈曲面轨迹中选取基准点,对第1圈曲面轨迹中每个轨迹点进行调整,直到第1圈曲面轨迹中每个轨迹点与所述基准点之间的欧式距离等于该轨迹点与基准点之间的目标距离,得到第1条抛光轨迹;其中,若i圈曲面轨迹为对称轨迹,则将第1圈曲面轨迹中位于对称点处的轨迹点作为基准点,若i圈曲面轨迹为非对称轨迹,则将第1圈曲面轨迹中第一个轨迹点作为基准点;
63、数据初始化模块,用于初始化i=2;
64、第二轨迹调整模块,用于对于第i圈曲面轨迹中每个轨迹点,在第i-1条抛光轨迹中选取与其欧式距离最近的轨迹点作为基准点,对第i圈曲面轨迹中各个轨迹点进行调整,直到第i圈曲面轨迹中每个轨迹点与其对应的基准点之间的欧式距离等于该轨迹点与其对应的基准点之间的目标距离,得到第i条抛光轨迹;
65、目标抛光轨迹获取模块,用于更新i=i+1,并返回执行第二轨迹调整模块的步骤,直到i=i,基于i条抛光轨迹得到待加工曲面的目标抛光轨迹;其中,轨迹点与基准点之间的目标距离为轨迹点处的抛光接触圆半径、轨迹点对应的基准点处的抛光接触圆半径和预设抛光轨迹重叠量之差的绝对值。
66、本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述的曲面抛光轨迹均匀覆盖方法的步骤。
67、本技术提供的曲面抛光轨迹均匀覆盖方法先对待加工曲面进行离散化,得到待加工曲面的网格模型,之后将预先生成的平面轨迹上的轨迹点映射至网格模型,得到曲面轨迹,由于待加工曲面具有复杂的曲率和形状,平面轨迹点映射至曲面模型后无法完全适应曲面的凹凸和曲率,因此,本技术在得到曲面轨迹后,先在第1圈曲面轨迹中选取基准点,对第1圈轨迹中各个轨迹点进行调整,使得各个轨迹点与基准点之间的欧式距离均等于轨迹点处的抛光接触圆半径、基准点处的抛光接触圆半径和预设抛光轨迹重叠量之差的绝对值,从而使得轨迹点适应曲面的凹凸和曲率,得到第1圈抛光轨迹后,对于第2圈曲面轨迹上的任意轨迹点均以第1圈抛光轨迹上与其欧式距离最近的轨迹点作为基准点,从而调整第2圈曲面轨迹上的轨迹点,得到第2圈抛光轨迹,以此类推,完成所有曲面轨迹调整,使得最终得到的目标抛光轨迹均匀覆盖待加工曲面,以对待加工曲面进行高精度抛光;本技术直接将平面轨迹映射至曲面模型上并对轨迹点的位置进行调整即可,无需获取待加工曲面的曲面方程,实现了无曲面方程情况下的曲面抛光轨迹生成。
本文地址:https://www.jishuxx.com/zhuanli/20241118/327890.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表