基于超构透镜阵列的光场粒子图像测速系统及方法
- 国知局
- 2024-11-18 18:21:55
本发明涉及流场测量,具体地,涉及一种基于超构透镜阵列的光场粒子图像测速系统及方法,更为具体地,涉及一种基于超构透镜阵列和单个数字相机的粒子图像测速系统及方法。
背景技术:
1、流场测量是流体力学研究中的重要组成部分,主要测量手段可以分为接触式测量和非接触式测量。其中,非接触式测量方法因其对流场无干扰、适用范围广、操作方便、测量精度高等优点而备受青睐。非接触式流场测量主要以光学测量技术为主,包括粒子图像测速(piv)、激光散斑测速(lsp)、粒子跟踪测速(ptv)等。
2、粒子图像测速(piv)是一种广泛应用于流体力学研究中的非接触式测量方法。piv技术具有对待测流场无干扰、能够获得瞬时和全场流速信息、分辨率高、适用范围广等优点,因而受到广泛关注。三维piv技术采用多个相机对流场内同一区域进行拍摄,从而解析出这一待测区域内的速度场。但是采用多相机的测量方式使得整个系统更为复杂,同时多相机拍摄需要进行各个相机的校准同步等流程,相较于传统piv,该方法的系统复杂程度与使用困难度都相对更高,因此研究人员们开始研究采用不同的方式来简化整体的系统复杂程度,例如采用微透镜阵列取代传统镜头形成光场相机的方式能够有效地简化系统。
3、mei等人提出了一种双光场相机piv技术,该技术采用两个光场相机对待测区域内的示踪粒子进行测量,有效提高了光场相机的分辨率与精度;tadd t.truscott等人则是提出了三维显微光场粒子图像测速技术,将光场相机与显微镜结合,实现了微小区域内的流场测量。然而,以上方法均存在一个不足:采用微透镜虽然能有效简化系统整体复杂程度,但传统微透镜阵列地加工误差会导致难以避免的像差。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种基于超构透镜阵列的光场粒子图像测速系统及方法。
2、根据本发明提供的一种基于超构透镜阵列的光场粒子图像测速系统,包括:
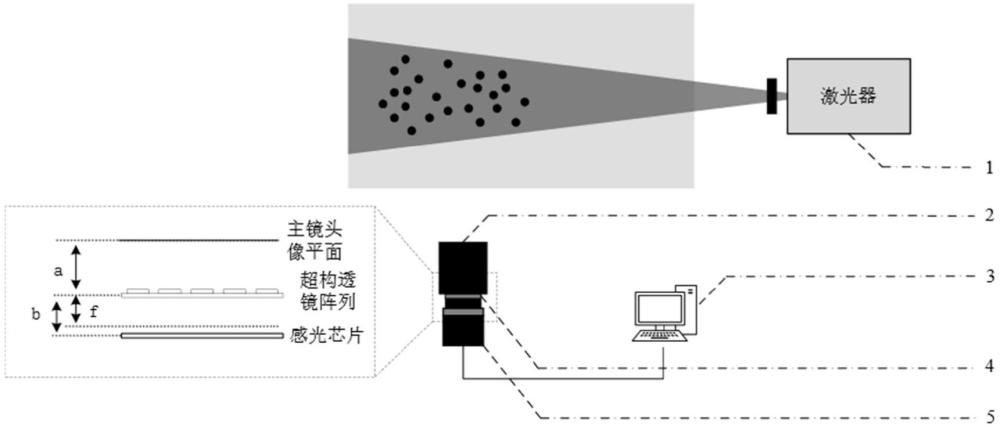
3、超构透镜阵列、数字相机、主成像镜头、激光光源和计算机;
4、其中,所述激光光源光强和光源厚度能够调节,均匀照亮整个测试区域;
5、所述超构透镜阵列包含多个超构透镜,组成规则阵列,对待测区域内示踪粒子散射或发出的光进行成像,所成的像位于数字相机感光芯片所在平面;
6、所述超构透镜包括基底和覆盖在基底上的纳米柱阵列,实现对入射光相位的调控,实现成像功能;针对不同的需求设计不同的相位补偿;
7、超构透镜为消球差的相位调制,用单片微米级厚度的二维平面超构透镜,将不同方向入射的光线折射聚焦至焦平面处,超构透镜的焦斑尺寸接近衍射极限;
8、所述数字相机用于采集待测流场中示踪粒子由超构透镜阵列所成的图像;
9、所述计算机处理由数字相机采集到的标定和实验图像数据,通过标定图像计算相机参数,对实验图像进行三维互相关或粒子匹配追踪分析计算,得到待测区域的粒子位移以及三维流场数据;
10、所述激光光源发出的光具有超构透镜时的工作波长。
11、优选地,在所述超构透镜阵列中:
12、所述超构透镜阵列包含一系列超构透镜,其周期性排布方式包括:四方晶格排布和六角晶格排布组成规则阵列;超构透镜满足规则排布,相互之间相切或者留有预设的间隙;超构透镜位于同一平面,且焦距相同;在设计的工作距离内,超构透镜阵列对待测区域能够同时成像;
13、通过设计不同超构表面对粒子成像测速技术测量进行优化;通过设计透射窄带的单波长超构透镜,使得粒子成像测速技术的单色激光照亮的例子能够被准确成像。
14、优选地,在所述数字相机中:
15、采用黑白相机,或者彩色相机。
16、优选地,不同的超构透镜使用不同的工作波长,在不同工作波长下的焦距相同;所采用的激光光源具备发出不同工作波长光的能力。
17、优选地,所述数字相机与超构透镜阵列组合形成光场相机,超构透镜阵列所在平面与相机感光芯片所在平面平行,两个平面之间间距有两种选择:
18、两个平面之间间距与超构透镜焦距相同;
19、或者满足高斯成像公式,当两个平面间距为a,超构透镜焦距为f,主镜头像平面与超构透镜阵列平面距离为b时,有1/a+1/b=1/f。
20、优选地,所述超构透镜阵列中超构透镜的几何形状包括圆形、椭圆形和多边形。
21、根据本发明提供的一种基于超构透镜阵列的光场粒子图像测速方法,采用所述的基于超构透镜阵列的光场粒子图像测速系统,执行包括:
22、步骤s1:在待测区域中均匀布撒示踪粒子,示踪粒子于待测流场的跟随性满足测量要求;
23、步骤s2:调节主透镜、超构透镜阵列及数字相机使成像系统对于区域内示踪颗粒成像;
24、步骤s3:进行所需测量的流场调整相机及光源参数,同步控制光源和相机,使得激光照亮整个待测区域,使用计算机控制相机采集图像;
25、步骤s4:拍摄标定图像,获取标定参数;
26、步骤s5:对采集到的图像进行分离并进行三维互相关或三维粒子追踪分析计算,得到三维速度场。
27、优选地,在所述超构透镜阵列中:
28、所述超构透镜阵列包含一系列超构透镜,其周期性排布方式包括:四方晶格排布和六角晶格排布组成规则阵列;超构透镜满足规则排布,相互之间相切或者留有预设的间隙;超构透镜位于同一平面,且焦距相同;在设计的工作距离内,超构透镜阵列对待测区域能够同时成像;
29、不同的超构透镜使用不同的工作波长,在不同工作波长下的焦距相同;所采用的激光光源具备发出不同工作波长光的能力。
30、优选地,在所述数字相机中:
31、采用黑白相机,或者彩色相机;
32、所述数字相机与超构透镜阵列组合形成光场相机,超构透镜阵列所在平面与相机感光芯片所在平面平行,两个平面之间间距有两种选择:
33、两个平面之间间距与超构透镜焦距相同;
34、或者满足高斯成像公式,当两个平面间距为a,超构透镜焦距为f,主镜头像平面与超构透镜阵列平面距离为b时,有1/a+1/b=1/f;
35、所述超构透镜阵列中超构透镜的几何形状包括圆形、椭圆形和多边形;
36、通过设计不同超构表面对粒子成像测速技术测量进行优化;通过设计透射窄带的单波长超构透镜,使得粒子成像测速技术的单色激光照亮的例子能够被准确成像。
37、优选地,在所述步骤s5中:
38、重构及互相关算法通过基于乘积代数重建技术mart及密集光线追踪的权重系数计算方法的光场粒子重构算法,三维粒子空间分布图从光场粒子图像中重构得到;
39、其步骤为:使用密集光线追踪方法确定非零值的体素voxel影响到的每个像素的权重系数,根据记录的像素值和权重系数,利用以下公式所表示的mart算法迭代计算粒子体素值;
40、
41、式中,e(xj,yj,zj)是第j体素的强度,i(xi,yi)是第i个像素的强度,从捕获的光场图像中得到,wi,j是加权系数,量化了第j个体素的光对第i个像素强度的贡献;
42、根据双平面模型,主透镜根据微透镜下方的像素数进行离散化,对一个特定像素,其权重系数由两部分相乘得到:点光源发出的所有光束中击中某个微透镜的光束面积与总的光束面积之比为权重系数w1;被击中的微透镜下一个ccd像素上的光束面积与进入这个微透镜的光束面积之比为w2;
43、得到粒子强度场后进行基于fft的之后利用三维互相关算法得到三维瞬态速度场,对计算得到的速度矢量场进行中值滤波和线性插值处理。
44、与现有技术相比,本发明具有如下的有益效果:
45、1、本发明仅采用一个相机的单次拍摄即可实现3d-piv测量,采用超构透镜取代了传统微透镜阵列,使其能在保持成像质量的前提下使系统结构更加紧凑、且参数易于调节。同时超构透镜设计为消球差的相位调制,仅用单片微米级厚度的二维平面超构透镜,将不同方向入射的光线都能准确折射聚焦至焦平面处。另外,超构透镜的焦斑尺寸接近衍射极限,在相同的数值孔径下具有更好的成像分辨率;
46、2、本发明通过超构透镜阵列实现单相机三维成像,具有全场速度场测量能力,同时可以通过设计不同超构表面来对piv测量进行优化;通过设计透射窄带的单波长超构透镜,使得piv的单色激光照亮的例子能被准确成像,无色差和减少其他环境光源的影响;
47、3、本发明还能有效拓展到高速、显微等特殊测量领域,从而有效降低硬件成本和测试空间需求;
48、4、本发明得益于新系统的光学结构,它可以像传统tomo-piv一样实现系统参数的方便调节。
本文地址:https://www.jishuxx.com/zhuanli/20241118/328428.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。