基于自抗扰控制的绿电制氢一体化电力系统的控制方法与流程
- 国知局
- 2024-11-19 09:41:59
本发明涉及新能源领域,具体涉及一种基于自抗扰控制的绿电制氢一体化电力系统的控制方法。
背景技术:
1、在新能源时代,电解槽的发展主要集中在氢能领域。随着氢能产业的快速发展,电解水制氢技术越来越受到关注,而电解槽作为电解水制氢的核心设备,其发展也备受瞩目。首先,电解槽在技术方面不断取得突破。目前,碱性电解水制氢和质子交换膜电解水制氢是已经实现商业化的电解水制氢技术路线。其中,碱性电解槽技术成熟、成本较低,仍是目前主流的电解槽技术路线。而质子交换膜电解水制氢则具有高效率和低能耗等优点,是未来电解水制氢的重要发展方向。此外,固态氧化物电解水制氢、阴离子交换膜电解水制氢等新型技术路线也在不断发展中,有望成为未来电解槽的重要选择。其次,电解槽在应用方面不断拓展。随着电解槽技术的不断发展和成本的不断降低,电解槽在新能源领域的应用越来越广泛。除了传统的化工、电力等领域外,电解槽还在能源、交通、航空航天等领域得到应用。例如,在能源领域,电解槽可以用于生产氢气作为燃料电池的燃料;在交通领域,电解槽可以用于生产氢气作为燃料电池汽车的燃料;在航空航天领域,电解槽可以用于生产氧气作为航天员呼吸的氧气来源。最后,电解槽的发展还受到政策支持的影响。各国政府越来越重视氢能产业的发展,并出台了一系列政策措施来支持电解槽等关键技术的研发和推广应用。总之,随着新能源时代的到来,电解槽的发展前景广阔。未来随着技术的不断进步和应用的不断拓展,电解槽将在新能源领域发挥更加重要的作用。现有的pid控制具有高稳定性、无静差、原理简单等优点,在工业控制领域中应用广泛。然而,电解槽气压控制系统具有大惯性、非线性、时滞性等特性,且存在外界因素的干扰,传统的控制难以达到良好的控制效果。自适应控制的控制精度较高,但需要在线辨被控对象的数学模型,这样会降低控制系统的抗干扰性。多参数模型预测控制优化问题需要在每个时间步上求解,过程繁琐。神经网络控制、专家系统、模糊控制等都属于智能控制算法,是未来的发展方向,但是人工智能理论还不是很成熟,寻优等问题容易有局限性,不易在工程中得到快速推广。电解水制氧设备是一个非常复杂的系统,而电解槽气压控制又是其控制系统最重要的环节之一;气压不稳定,会影响设备的工作效率,进一步会影响企业的生产效益,故必须使得气压稳定在工况指标。电解槽气压是氢氧发生器的重要环节,关系到电解效率和工作安全;气压过高或过低,都会带来不利的影响。然而,氢氧发生器产气过程较为复杂,电解槽气压的控制难度大,因此,选择一种控制算法对电解槽气压进行控制非常重要。
2、反馈控制器具有更好的抗扰能力,并且在面对可变系统参数时具有更强的鲁棒性。因此,许多研究已经实现了比例-积分-导数(pid)控制器,并进行了一些变化以适应其特定的应用需求。其中,比例积分(pi)控制器是一种简单而流行的方法,可以产生所需的动态响应并消除误差。多参数模型预测控制器,通过驱动给水流量来调节堆温。该控制器的设计目的是使抑制系统干扰,除了比例和积分元件外,还使用导数控制元件改善了动态参考跟踪。因此,采用pid控制器通过操纵堆叠电压来跟踪制氢速率设定点,应用了基于逻辑的开关调节堆栈温度,以及氧气和氢气分离容器中的水位。还可以利用基于模型的前馈组件实现了一种增益调度pid控制器,以抑制模型不确定性导致的偏差。在他们的工作中,操作点相关pid参数提供一致的动态范围跨越整个操作窗口。
3、现有的pid控制具有稳定性、无静差、原理简单等优点,在工业控制领域中应用广泛。然而,电解槽气压控制系统具有大惯性、非线性、时滞性等特性,且存在外界因素的干扰,传统的控制难以达到良好的控制效果。自适应控制的控制精度较高,但需要在线辨被控对象的数学模型,这样会降低控制系统的抗干扰性。多参数模型预测控制优化问题需要在每个时间步上求解,过程繁琐。神经网络控制、专家系统、模糊控制等都属于智能控制算法,是未来的发展方向,但是人工智能理论还不是很成熟,寻优等问题容易有局限性,不易在工程中得到快速推广。
技术实现思路
1、有鉴于此,本发明提供了一种基于自抗扰控制的绿电制氢一体化电力系统的控制方法,通过扩张状态观测器对扰动进行实时估计,并通过状态反馈控制器进行实时补偿,该方法包括以下步骤:
2、传感器采集步骤:通过压力传感器实时采集制氢系统电解槽的压力数据;
3、系统建模步骤:利用采集到的所述相关数据建立系统的数学模型;
4、ladrc控制器设计步骤:设计线性自抗扰控制器,通过对系统的模型进行线性化补偿,实现对系统的高效控制;
5、控制参数调整步骤:根据采集的数据和系统状态,调整ladrc控制器的参数,以适应不同的运行条件和外部环境变化;
6、控制策略实施步骤:将所述ladrc控制器输出的控制信号应用于电解槽,以实现系统的高效协调运作和能源转化;
7、性能监测步骤:实时监测系统的性能,包括能源转化效率、系统稳定性和响应速度等指标,并根据监测结果进行进一步的控制优化。
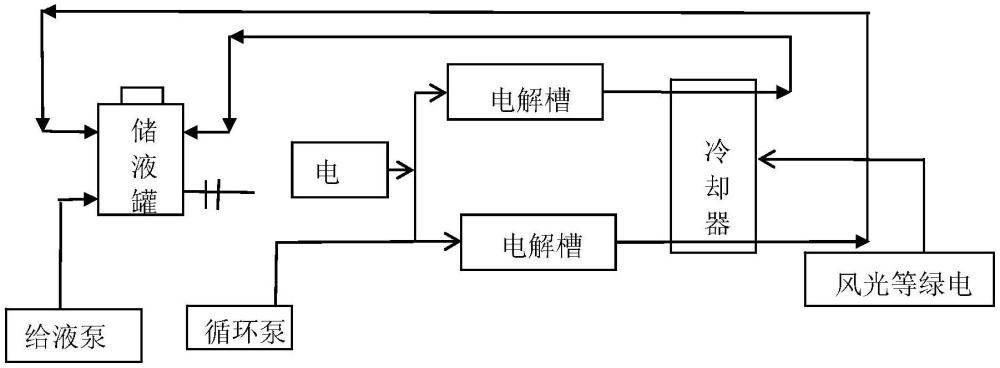
8、特别地,所述系统建模步骤中,利用采集到的所述相关数据建立系统的数学模型包括:明确控制对象为氢氧发生器电解槽气压,通过流体力学原理推导出电解槽气压控制的动态数学模型,具体包括:使用给液装置、压力容器、电解槽、调节阀和缓冲容积容器;由给液装置将电解液提供给电解槽,所述电解槽是发生电解反应产生氢氧气的核心部件,由电源提供电能,产生的氢氧气进入压力容器暂存;调节阀控制气体流量进入管道,构建管道模型;所述管道模型中,将反应时滞和传输时滞作为动态特性;通过缓冲容积容器测量和控制氢氧气的体积,实现对动态数学模型的推导,根据工艺参数和简化动态过程最终得到的所述电解槽气压动态数学模型为:
9、
10、其中s是拉普拉斯变换中的复变量,用于描述系统的频域特性。
11、特别地,ladrc控制器设计步骤包括:将所述adrc控制器通过非线性反馈结构减少控制参数,将所有控制器和状态扩张观测器从非线性形式简化为线性形式,实现将所述adrc控制器替换为采用线性自抗扰控制方法的ladrc控制器;进而对adrc控制器设计步骤中包括对扩张状态观测器(eso)进行设计,对跟踪微分器进行设计和对非线性反馈控制律的设计三个部分。
12、特别地,所述对扩张状态观测器(eso)进行设计包括:实时估计系统的总扰动,包括内部不确定性和外部扰动;所述对跟踪微分器进行设计包括:通过微分输入信号并生成期望跟踪轨迹。
13、特别地,所述对非线性反馈控制律的设计包括:通过非线性组合补偿误差,从而实现对系统的精确控制。
14、特别地,通过扩张状态观测器(eso)实时估计系统的总扰动,其设计表达式具体包括:
15、其中,ε1表示观测误差,z1,z2,z3分别表示观测器的三个状态变量,其中z1对应于系统实际输出,y对应于系统输出,z3对应于系统的总扰动;β01,β02,β03是观测器增益参数,用于调节观测器的收敛速度和抑制噪声;和是非线性函数,用于实现观测误差的非线性处理,提高观测性能;其表达式为:a为幂指数参数;
16、δ是边界层宽度参数,b是系统的增益参数,用于补偿控制输入对系统的影响,u是控制器输出信号;分别表示z1,z2,z3的微分。
17、所述对跟踪微分器用于生成期望跟踪信号,其设计表达式具体包括:
18、
19、x1表示跟踪微分器的第一个状态变量,x2表示跟踪微分器的第二个状态变量,即x1的导数,v0是期望的跟踪信号,r是加速度限制因子,限制x2的幅值。
20、特别地,所述非线性反馈控制律用于实现对系统的精确控制,其设计表达式具体包括:
21、u0=-β1fal(e1,a1,δ)+β2fal(e2,a2,δ),且,0<z1<1<a2
22、其中,e1,e2表示状态误差,即实际状态与期望状态之间的差值;β1,β2是反馈控制增益参数,决定了控制律的增益。
23、特别地,所述ladrc控制系统中包括线性扩张状态观测器(linear extendedstateobserver,leso),对象模型和线性状态误差反馈控制(linear state errorfeedback,lsef);
24、所述线性扩张状态观测器在ladrc控制系统的设计过程中,被控对象的数学模型为:
25、y(p)(t)=bu(t)+f(y(t),u(t),d(t))
26、其中p表示被控对象的相对阶,b表示被控对象串联积分模型的增益,f(y(t),u(t),d(t))包括对象的内部不确定性和外部扰动,即总扰动;所述线性扩张状态观测器(leso)被设计用来估计未知的系统总扰动,其设计过程具体包括:假设且f是可微分的,所述线性扩张状态观测器(leso)可以表示为:
27、
28、在式中z=[z1 z2...zp zp+1]t表示被估计的状态变量;
29、
30、特别地,所述控制参数调整步骤中,调整ladrc控制器的参数可通过工程人员的经验法调整;或者通过已有的控制器整定方法进行转换调整。
31、特别地,所述控制参数调整步骤还包括:将ladrc控制器输出的控制信号应用于风能、太阳能和氢能系统。
32、有益效果:
33、1.电解槽气压控制系统是一个大惯性、大时滞、非线性的复杂系统,通过自抗扰控制对气压控制,比现有传统控制能更好的不依赖精确的模型,并可对扰动进行实施补偿,从而进一步优化设备的工作效率。
34、2.提高系统的稳定性:相比传统pid控制,自抗扰控制能够更好地抵抗外部干扰和内部扰动,提高了系统的稳定性。
35、3.增强系统性能:ladrc控制器具能够根据系统状态实时估计系统状态,通过反馈控制律实时补偿误差,提高了系统的性能和响应速度。
36、4.降低能源浪费:通过更精确的控制,能够减少能源浪费,提高能源转化效率。
37、5.适应多变环境:ladrc控制方法鲁棒性强,能够应对不同的环境条件和运行情况,提高了系统的鲁棒性性。
38、6.提高了绿电制氢发电厂的产氢效率,增加发电厂收益。
本文地址:https://www.jishuxx.com/zhuanli/20241118/329840.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表