机器元件的直接或间接混合的驱动器的闭环控制器结构的制作方法
- 国知局
- 2024-11-19 09:40:44
本发明涉及用于第一驱动器和第二驱动器的闭环控制器结构,其中,第一驱动器经由传动装置作用于机器元件上并且第二驱动器直接作用于机器元件上以使机器元件相对于轴移动,其中,借助于第一力先导控制值进行第一驱动器的闭环控制并且借助于第二力先导控制值进行第二驱动器的闭环控制。本发明尤其涉及用于第一驱动器和第二驱动器的闭环控制器结构,其中,第一驱动器经由传动装置作用于机器元件上并且第二驱动器直接作用于机器元件上,-其中,闭环控制器结构包括位置闭环控制器,位置闭环控制器利用闭环控制时钟脉冲分别接收机器元件的位置设定值与位置实际值的差并且根据相应的位置设定值和相应的位置实际值驱控第一驱动器,-其中,闭环控制器结构包括第二速度闭环控制器,第二速度闭环控制器利用第一速度闭环控制时钟脉冲分别接收机器元件的获得的速度设定值与速度实际值的差,根据机器元件的相应的获得的速度设定值和相应的速度实际值分别确定第二驱动器的第二力设定值,并且根据相应的第二力设定值驱控第二驱动器,-其中,闭环控制器结构具有第一确定装置,第一确定装置确定相应的获得的速度设定值并将其输出至第一速度闭环控制器,-其中,位置闭环控制器根据相应的位置设定值与相应的位置实际值的差分别确定机器元件的速度设定值并且将相应的速度设定值作为输出信号输出,-其中,闭环控制器结构包括第一速度闭环控制器,第一速度闭环控制器利用第一速度闭环控制时钟脉冲分别接收第一驱动器的速度实际值与获得的速度设定值的差,根据第一驱动器的相应的速度实际值与相应的获得的速度设定值的差分别确定第一驱动器的第一力设定值并且根据相应的设定值驱控第一驱动器,-其中,第一确定装置接收相应的速度设定值并且使用相应的速度设定值确定获得的速度设定值,-其中,第一确定装置将相应的获得的速度设定值除了输出至第一速度闭环控制器之外还输出至第二速度闭环控制器。本发明还涉及一种用于第一驱动器和第二驱动器的开环控制装置,其中,第一驱动器经由传动装置作用于机器元件上并且第二驱动器直接作用于机器元件上,-其中,开环控制装置具有上级开环控制器和闭环控制器结构,-其中,上级开环控制器利用闭环控制时钟脉冲为闭环控制器结构预设位置设定值,-其中,闭环控制器结构如上所述地实施。本发明还涉及一种机器,-其中,机器具有机器元件、第一驱动器、第二驱动器和传动装置,-其中,第一驱动器经由传动装置作用于机器元件上并且第二驱动器直接作用于机器元件上,-其中,第一驱动器和第二驱动器由这种开环控制装置控制。本发明还涉及一种用于闭环控制具有第一驱动器和第二驱动器的驱动单元的方法,其中,第一驱动器经由传动装置作用于机器元件上并且第二驱动器直接作用于机器元件上以使机器元件相对于轴移动,其中,借助于第一力先导控制值进行第一驱动器的闭环控制并且借助于第二力先导控制值进行第二驱动器的闭环控制。本发明特别涉及一种用于闭环控制具有第一驱动器和第二驱动器的驱动单元的方法,其中第一驱动器经由传动装置作用于机器元件上并且第二驱动器直接作用于机器元件上以使机器元件相对于轴移动,-其中,位置闭环控制器利用闭环控制时钟脉冲分别接收机器元件的位置设定值与位置实际值的差并且根据相应的位置设定值和相应的位置实际值驱控第一驱动器,-其中,第二速度闭环控制器利用第一速度闭环控制时钟脉冲分别接收机器元件的获得的速度设定值与速度实际值的差,根据机器元件的相应的获得的速度设定值和相应的速度实际值分别确定第二驱动器的第二力设定值,并且根据相应的第二力设定值驱控第二驱动器,-其中,第一确定装置确定相应的获得的速度设定值并将其输出至第一速度闭环控制器,-其中,位置闭环控制器根据相应的位置设定值与相应的位置实际值的差分别确定机器元件的速度设定值并且将相应的速度设定值作为输出信号输出,-其中,第一速度闭环控制器利用第一速度闭环控制时钟脉冲分别接收第一驱动器的速度实际值与获得的速度设定值的差,根据第一驱动器的相应的速度实际值与相应的获得的速度设定值的差分别确定第一驱动器的第一力设定值并且根据相应的设定值驱控第一驱动器,-其中,第一确定装置接收相应的速度设定值并且使用相应的速度设定值确定获得的速度设定值,-其中,第一确定装置将相应的获得的速度设定值除了输出至第一速度闭环控制器之外还输出至第二速度闭环控制器。
背景技术:
1、机器轴通常由驱动器、传动装置和机器元件构成。在这种情况下,驱动器仅与传动装置作用于机器元件上。这种装置的缺点是:传动装置具有相对较低的刚性,进而至少机器元件的动力学、在许多情况下还有机器元件的定位精度相对较低。
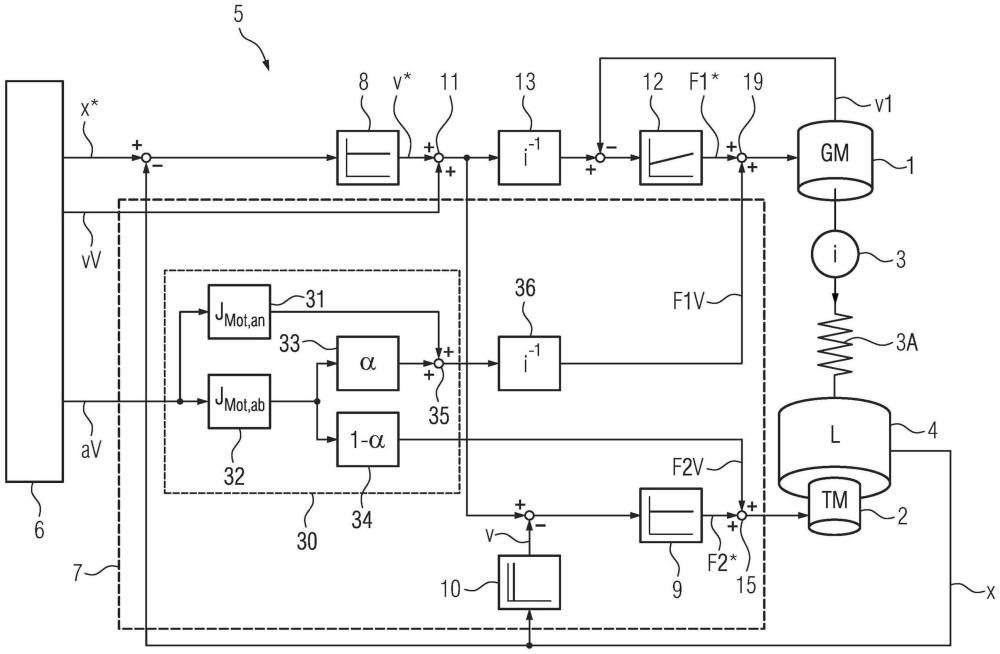
2、本发明特别针对如下机器轴,其中驱动系统包括具有经典驱动系(kgt(滚珠丝杠)、变速器等)的伺服马达并且同时包括直接驱动器(参见图1)。这种驱动装置通过力设定值不是严格按比例划分的而是根据任务来划分的方式来与具有对称驱动系的经典主从装置区分。
3、该装置的优点是能够结合两种驱动类型(直接和间接)的优点。
4、-直接驱动器靠近负载,并且可用于传递高频的力分量。靠近负载的直接驱动器可用于衰减靠近进程的震荡模式。
5、-由于高传动比,“便宜”设计的、具有小结构空间和功率的伺服马达可以补偿高静态的和准静态的载荷。
6、该驱动组的目的是增加轴动力。在此,应该可以:
7、-以一致的质量开动较高的加加速度和/或较高的加速度,进而提高生产率,
8、-或者在一致的动力的情况下减少振荡趋势,从而提高移动的质量,
9、-或者在提高动力的同时提高质量/路径精度。
10、在经常会出现的实施方案中,间接地经由滚珠丝杠或变速器驱动的轴通过负载侧上的直接驱动器来补充。为此,在线性轴中使用线性马达,在回转轴(旋转轴)的情况下使用扭矩马达。
11、该驱动器组合的问题主要在于用于马达量值和大耗费的冷却而导致集成直接驱动器的复杂性。此外,与间接驱动器相比,直接驱动器的成本非常高。例如,如果为机器人的3个主轴选择这种方案,则产生显著的额外成本,额外成本尽管通过增加动力带来附加值,但仍限制设施的竞争力。
12、从ep 2 174 748 a1中已知所提及类型的闭环控制器结构、开环控制装置和机器。通过机器轴的这种设计方案,在适当地涉及第一驱动器和第二驱动器的驱控的情况下可行的是:以高动力和高定位精度来定位机器元件。特别地,第一驱动器可用于传输高频力分量并且用于抑制与进程相关的震荡,而第二驱动器可承受高静态和低频的负载。然而,从ep 2174 748a1中无法得出关于闭环控制器结构的更详细的设计方案。
13、从us2010/0 171 458a1中已知一种用于第一驱动器和第二驱动器的闭环控制器结构,其中第一驱动器和第二驱动器经由相应的传动装置作用于机器元件上,其中该闭环控制器结构包括位置闭环控制器,位置闭环控制器利用闭环控制时钟脉冲分别接收机器元件的位置设定值和位置实际值,并根据相应的位置设定值和相应的位置实际值来驱控第二驱动器,其中该闭环控制器结构包括第一速度闭环控制器,第一速度闭环控制器利用第一速度闭环控制时钟脉冲分别接收机器元件的获得的速度设定值与速度实际值的差,并且根据机器元件的相应获得的速度设定值和相应的速度实际值分别确定第一驱动器第二力设定值并且根据相应的第二力设定值来驱控第一驱动器,其中闭环控制器结构具有第一确定装置,第一确定装置确定相应的获得的速度设定值并且输出至第一速度闭环控制器,其中位置闭环控制器根据相应的位置设定值和相应的位置实际值来分别确定机器元件的速度设定值并输出相应的速度设定值作为输出信号,其中闭环控制器结构包括第二速度闭环控制器,第二速度闭环控制器随第二速度闭环控制时钟脉冲来分别接收第二驱动器的由位置闭环控制器输出的速度设定值和相应的速度实际值的差,并且根据第二驱动器的速度设定值和相应的速度实际值来分别确定第二驱动器的第一力设定值,并且根据相应的第一力设定值来驱控第二驱动器。
14、可从de 10 2014 005 664 b3中得出基本上类似的情况。
15、从ep 2 954 986 a1中已知一种用于控制和调节具有多个运动学上相互作用的单独主体的系统的设备,单独主体中的至少一个由驱动器移动。在此设有负载计算装置,其用于在系统移动期间根据预设的设定坐标持续地计算每个单独主体的各一个力矢量,还设有力矩计算装置,其用于在移动期间基于设定坐标和力矢量持续地计算补偿力矢量的补偿量值。此外,已知的用于控制和调节的装置具有控制单元,其用于在运动期间根据目标坐标和至少一个补偿扭矩在移动期间持续地经由用于闭环控制至少一个驱动器的形成力的量值的闭环控制单元来进行闭环和开环的控制。
16、从ep 3 625 628 a1中已知一种用于机器元件的驱动器,其中第一驱动器、例如变速器马达经由传动装置直接作用于机器元件上,并且第二驱动器、例如扭矩马达直接作用于机器元件上。位置闭环控制器接收机器元件的位置设定值和位置实际值,并且根据这些量值确定机器元件的速度设定值。第一确定装置接收速度设定值并使用该速度设定值确定获得的速度设定值。第一速度闭环控制器根据第一驱动器的速度实际值与获得的速度设定值的差来确定第一力设定值,并且根据所述力设定值来驱控第一驱动器。第二速度闭环控制器基于获得的速度设定值和机器元件的实际速度之间的差来确定第二力设定值,并且根据力设定值来驱控第二驱动器。已知的闭环控制器结构还包括第二确定装置,第二确定装置利用先导控制时钟脉冲分别接收加速度先导控制值,并从中结合高通和低通滤波器接收第一驱动器的第一力先导控制值和第二驱动器的第二力先导控制值。
17、从ep 0 604 672 a1中已知一种用于对数控的耦合的驱动系统进行转矩先导控制的方法,其中每个轴的加速力矩从转矩计算时钟脉冲中的固有惯量矩和耦合惯量矩中确定。以较慢的时钟脉冲跟踪固有惯量矩和耦合惯量矩的变化。
技术实现思路
1、本发明的目的在于:创建一种用于具有多个驱动器的轴的闭环控制器结构,其允许以成本优化的方式来设计驱动器的量值。
2、该目的通过本发明的闭环控制器结构来实现。
3、根据本发明,开头部分提到类型的闭环控制器结构通过如下方式设计:
4、设有第三确定装置,该第三确定装置包括确定第一轴惯量的第一惯量确定装置,其中,第三确定装置包括确定第二轴惯量的第二惯量确定装置,并且其中,第一轴惯量和/或第二轴惯量分别以不同的、尤其能调节的权重参与对第一力先导控制值和第二力先导控制值的确定。
5、根据本发明,开头部分提到类型的闭环控制器结构尤其通过以下方式设计:
6、闭环控制器结构具有的第三确定装置利用先导控制时钟脉冲接收加速度先导控制值,根据相应的加速度先导控制值确定第二驱动器的相应的第二力先导控制值并且将相应的第二力先导控制值输出至第二加法装置,第二加法装置将相应的第二力先导控制值相加到相应的第二力设定值,使得根据相应的第二力先导控制值和相应的第二力设定值的和来驱控第二驱动器,
7、其中,第三确定装置借助于相应的暂时的力先导控制值来确定第一驱动器的相应的第一力先导控制值并且将相应的第一力先导控制值输出至第一加法装置,第一加法装置将相应的第一力先导控制值相加到相应的第一力设定值,使得根据相应的第一力先导控制值和相应的第一力设定值的和来驱控第一驱动器,
8、其中,第三确定装置包括确定第一轴惯量的第一惯量确定装置,
9、其中,第三确定装置包括确定第二轴惯量的第二惯量确定装置,
10、其中,根据马达惯量、第一轴惯量、第二轴惯量和第一缩放系数确定相应的第一力先导控制值,并且
11、其中,根据第二轴惯量和第二缩放系数确定相应的第二力先导控制值。
12、通过根据位置设定值和位置实际值(尤其根据位置设定值与位置实际值的差)确定获得的速度设定值,尤其可以实现:即使存在在位置设定值中会不明显察觉的干扰的情况下也以高动力支持纠正这种干扰。
13、本发明提出:闭环控制器结构具有第三确定装置,第三确定装置利用先导控制时钟脉冲分别接收加速度先导控制值,根据相应的加速度先导控制值确定第二驱动器的相应的第二力先导控制值,并且将相应的第二力先导控制值输出至第二加法装置,第二加法装置将相应的第二力先导控制值相加给相应的第二力设定值,使得根据相应的第二力先导控制值和相应的第二力设定值的和来驱控第二驱动器。
14、通过该设计方案,改进在定位机器元件时的动力,尤其在位置设定值的通常事先已知改变的情况下改进在定位机器元件时的动力。
15、本发明还提出:除了相应的第二力先导控制值之外,闭环控制器结构的第三确定装置还根据相应的暂时的力先导控制值确定第一驱动器的相应的第一力先导控制值。在此,第三确定装置将相应的第一力先导控制值输出至第一加法装置,第一加法装置将相应的第一力先导控制值相加至相应的第一力设定值,使得根据相应的第一力先导控制值和相应的第一力设定值的和来驱控第一驱动器。
16、由此,可以提高在定位机器元件时有第一驱动器达到的动力,使得减少第二驱动器的获得的负载。
17、本发明提出:在确定力先导控制值时考虑相关的轴的轴惯量,因此根据相应的轴惯量进行力先导控制值的确定。
18、在ep2954986a1中解释了可以如何根据姿态和负载随时从机器模型中确定从每个轴的角度来看的总惯量(也称为轴总惯量或简称轴惯量)jmot。特别地在此需要强调:轴惯量在系统(机器)移动期间动态地确定,特别是在闭环控制器结构的时钟中动态地确定。
19、通常,所谓的轴惯量jmot是由驱动器移动的所有部件的(总)惯量(包括驱动器本身的惯量)。轴管理从机器的各个(相对于轴的)移动的部件的惯量和中得出,进而通常可以从机器或机器人制造商的数据中获得。
20、除了驱动器本身的可移动的部件之外,由驱动器移动的机器的所有元件(即,在运动链中跟随相关的驱动器的元件)都包含到轴惯量jmot中。对于该元件,在机械工程师方面通常存在有关转动惯量的说明或可以从中确定惯量矩的说明(几何量值、质量、重心等)。
21、本发明基于具有驱动单元的轴,该驱动单元包括两个驱动器,其中第一个驱动器(变速器马达)经由传动装置(变速器)作用于机器元件上,并且第二驱动器(直接驱动器,扭矩马达)直接作用于机器元件上。
22、本发明还基于一种驱动模型,其中驱动系、特别是变速器的刚性通过具有特定弹簧刚性的弹簧来建模。
23、轴惯量jmot现在分为第一轴惯量jmot,an和第二轴惯量jmot,ab,第一轴惯量与驱动单元的变速器驱动侧相关,并且第二轴惯量与驱动系的变速器从动侧相关。
24、根据本发明,闭环控制器结构的第三确定装置包括第一惯量确定装置,第一惯量确定装置为相关的轴确定与驱动单元的变速器驱动侧相关的第一轴惯量jmot,an。jmot,an至少主要包括第一驱动器(变速器马达)和传动装置(变速器)以及可能的其他部件(例如变速器初级)的惯量。
25、此外,第三确定装置包括第二惯量确定装置,第二惯量确定装置对于相关的轴确定与驱动单元的变速器从动侧相关的第二轴惯量jmot,ab。jmot,ab包括第二驱动器(扭矩马达)和“负载”的惯量,其中负载包括沿着机器的运动链连接于第二驱动器的所有机械部件、即由其移动的机械部件。
26、如下关联适用:
27、jmot=jmot,an+jmot,ab/i2
28、其中i是变速器的传动比。
29、有利地,第一轴惯量(jmot,an)和/或第二轴惯量(jmot,ab)分别以不同的、尤其能调节的权重参与第一力先导控制值f1v和第二力先导控制值f2v的确定。
30、特别地,两个力先导控制值f1v、f2v中的至少一个与第一轴惯量和第二轴惯量两者相关。
31、有利地,根据本发明,相应的第二力先导控制值(f2v)根据第二轴惯量jmot,ab和第二缩放系数确定,并且相应的第一力先导控制值根据第一轴惯量jmot,an、第二轴惯量jmot,ab和第一缩放系数确定。
32、在闭环控制器结构的一个优选的设计方案中提出:第一确定装置还接收相应的速度先导控制值并且确定相应的所得到速度设定值作为相应的速度设定值与相应的速度先导控制值的和。通过该设计方案,还可以进一步改进在定位机器元件时的动力。
33、所谓的内交流(intalk)效应从驱动系的低通效应中得出。为了传递马达的移动直至负载,必须首先(在驱动系的质量弹簧模型中)张紧“驱动系弹簧”。因此,在弹簧中存储了足够的扭矩来设置运动中的负载惯量。借助于马达的补偿移动可以缩短弹簧张紧的时间。该移动与加速度、负载惯量和弹簧刚性成正比。这种所谓的“内交流补偿”通常具有强的高通特性,并在机械系统中引起硬的力峰值。为了平滑所述峰值,可以例如通过低通滤波器来进行补偿。
34、在闭环控制器结构的一个优选的设计方案中,为了补偿内交流效应,设有第一内交流补偿确定装置,第一内交流补偿确定装置接收速度先导控制值并且确定已补偿的速度先导控制值。在如此确定的值同样输送给速度闭环控制器之前,速度先导控制值有利地必要时还与传动比相乘。
35、在闭环控制器结构的另一优选的设计方案中,为了补偿内交流效应,还设有第二内交流补偿确定装置,第二内交流补偿确定装置接收第三适配块的输出值并且(必要时在与传动比相乘之后)确定已补偿的第一力先导控制值。
36、该目的还通过本发明的开环控制装置来实现。根据本发明,开环控制装置的闭环控制器结构被设计为根据本发明的闭环控制器结构。
37、该目的还通过本发明的机器来实现。
38、根据本发明,第一驱动器和第二驱动器由根据本发明的开环控制装置来控制。
39、在机器的一个优选的设计方案中,机器被设计为机床、生产机器或机器人。
40、根据本发明,开头部分提到的类型的方法提出:确定第一轴惯量并确定第二轴惯量,
41、其中,第一轴惯量和/或第二轴惯量分别以不同的、特别是可调节的权重参与对第一力先导控制值和第二力先导控制值的确定。
42、特别地,根据本发明,开头部分提到的类型的方法提出:第一确定装置接收相应的速度设定值并且使用相应的速度设定值来确定获得的速度设定值,
43、-其中,除了第一速度闭环控制器之外,第一确定装置还将相应的获得的速度设定值输出至第二速度闭环控制器,
44、-其中,第三确定装置根据相应的暂时的力先导控制值确定第一驱动器的相应的第一力先导控制值,并将相应的第一力先导控制值输出至第一加法装置,第一加法装置将相应的第一力先导控制值相加至相应的第一力设定值,使得根据相应的第一力先导控制值和相应的第一力设定值的和来驱控第一驱动器,
45、-其中,根据第一轴惯量、第二轴惯量和第一缩放系数来确定相应的第一力先导控制值,并且
46、-其中,根据第二轴惯量和第二缩放系数来确定相应的第二力先导控制值。
本文地址:https://www.jishuxx.com/zhuanli/20241118/329759.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表