一种在平面与阶梯路面能够平稳自动运行的机器人
- 国知局
- 2024-11-19 09:30:22
本发明涉及机器人,具体的,涉及一种在平面与阶梯路面能够平稳自动运行的机器人。
背景技术:
1、机器人是一种能够执行特定热任务的自动化机器设备,可以根据预先设定的程序或通过人工智能技术进行自主决策和行动。机器人通常被用于危险环境、生产线、医疗保健、军事和日常生活中的各种任务。它们可以采用各种形态,包括人形、动物形、车辆形等,在城市中,机器人的使用场景和用途更加丰富多样,例如服务型机器人、物流机器人、清洁机器人以及施工机器人等。
2、施工机器人以及救援机器人在使用时会经常在平地上以及楼梯上运动,施工机器人进行重物搬运,维护设备时会在阶梯上运动,救援机器人会进入一些人员不便于进入的区域,对情况进行检测,或者进行拆弹等高风险工作,救援机器人难免会遇到阶梯路面,传统的机器人有通过轮子进行移动的,轮式机器人在平整的地面上运行速度较快,但是在遇到较高的阶梯时翻越阶梯的能力较差,而多足型机器人在面对阶梯时翻越能力较强,但是多足机器人通常在平地上运行的速度较低,两种机器人在面对平面路面和阶梯路面均存在的路况时,会存在难以自动运行的缺点,对于工作效率以及救援速度都有所延误,所以为了使得机器人在面对平面路面以及阶梯路面均存在的路况可以正常运行,我们提出了一种在平面与阶梯路面能够平稳自动运行的机器人。
技术实现思路
1、本发明提出一种在平面与阶梯路面能够平稳自动运行的机器人,解决了相关技术中传统的机器人在遇到平面路面以及阶梯路面均存在的路况时难以自动运行的问题。
2、本发明的技术方案如下:
3、一种在平面与阶梯路面能够平稳自动运行的机器人,包括:
4、壳体;
5、延伸机构,所述延伸机构滑动设置在所述壳体上,所述延伸机构上设置有翻越机构,所述延伸机构用于带动所述翻越机构在所述壳体上滑动;
6、其中,所述翻越机构转动设置在所述延伸机构上,所述翻越机构用于的带动所述壳体翻越阶梯;
7、拉伸机构,多个所述拉伸机构圆周设置在所述翻越机构上,所述拉伸机构用于带动所述壳体翻越不同高度的阶梯;
8、其中,所述翻越机构设置在所述延伸机构的两侧。
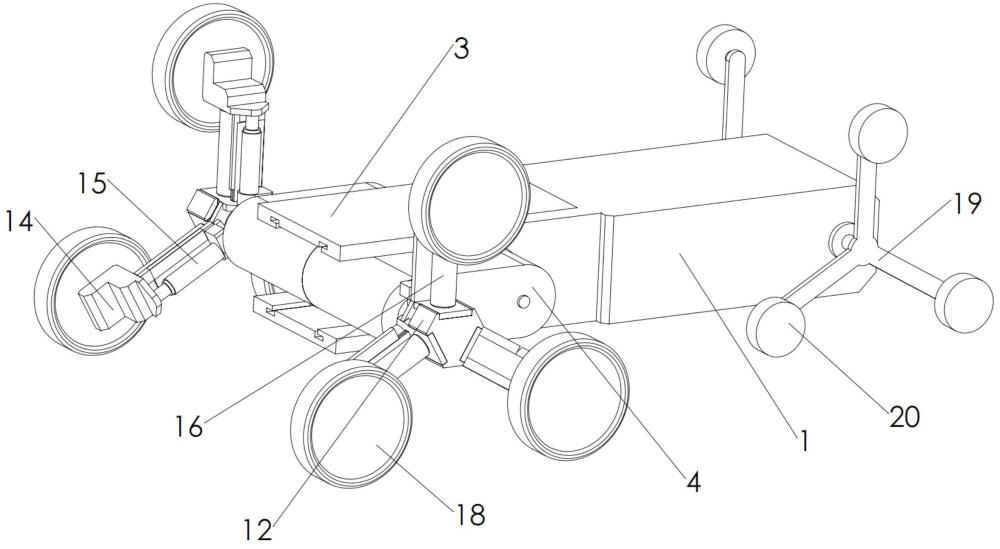
9、所述延伸机构包括:
10、驱动缸一,所述驱动缸一设置在所述壳体中;
11、滑轨,所述滑轨设置在所述壳体上,所述滑轨设置在所述驱动缸一的两侧;
12、延伸框,所述延伸框滑动设置在所述滑轨上,所述延伸框与所述驱动缸一的输出端连接。
13、所述翻越机构包括:
14、电机一,所述电机一设置在所述翻越轴的侧方;
15、翻转轴,所述翻转轴转动设置在所述延伸框上;
16、齿环,所述齿环设置在所述翻转轴上,所述齿环设置在所述延伸框内部;
17、齿带,所述齿带套设在所述齿环以及所述电机一的输出端上。
18、所述翻越轴上设置有电机二,两个所述翻转轴上转动设置有驱动轴,所述电机二与所述驱动轴传动连接,所述驱动轴的两端设置有锥齿轮。
19、所述翻转轴上伸出所述延伸框的一端上设置有转轴框,所述拉伸机构环绕设置在所述转轴框上。
20、所述拉伸机构包括:
21、滑板一,所述滑板一设置在所述转轴框上;
22、齿轮槽,所述齿轮槽上设置有滑板二,所述滑板二与所述滑板一滑动连接;
23、驱动缸二,所述驱动缸二安装在所述转轴框上,所述驱动缸二的输出端与所述齿轮槽连接。
24、所述拉伸机构还包括:
25、带动轴一,所述带动轴一转动设置在所述转轴框上,所述带动轴一伸入所述转轴框的一端设置有所述锥齿轮,所述带动轴一上的锥齿轮与所述驱动轴上的所述锥齿轮相啮合;
26、带动轴二,所述带动轴二转动设置在所述齿轮槽上,所述带动轴一与所述带动轴二滑动连接,所述带动轴伸入所述齿轮槽的一端上设置有所述锥齿轮;
27、驱动轮,所述驱动轮转动设置在所述齿轮槽上,所述驱动轮上设置有所述锥齿轮,所述驱动轮上的所述锥齿轮与所述带动轴二上的所述锥齿轮相啮合。
28、所述壳体上远离所述延伸框的一端转动设置有转动轮,所述转动轮上设置有多个支臂,所述支臂上转动设置有转轮。
29、本发明的工作原理及有益效果为:
30、1、本发明中通过设置电机二与驱动轴,电机二带动驱动轴转动,驱动轴两端的锥齿轮带动转轴框上的多个带动轴一转动,带动轴一带动带动轴二转动,带动轴二通过锥齿轮带动驱动轮转动,驱动轮可为机器人的行进提供动力,且由于多个带动轴一上的锥齿轮与驱动轴上的锥齿轮啮合,当转轴框随着翻转轴转动时,带动轴一上的锥齿轮与驱动轴上的锥齿轮时刻啮合,驱动轴可时刻为带动轴一的转动提供动力,使得无论翻转轴是否转动,驱动轮都可带动机器人在路面上行走;
31、2、本发明中通过设置翻转轴与齿带,电机二通过齿带带动齿环转动,齿环与翻转轴转动时驱动轮会在地面上进行转动,当遇到阶梯时,翻转轴转动使得滑板一与滑板二带动齿轮槽转动,齿轮槽上的驱动轮可通过随着翻转轴转动到阶梯的上方,继续通过翻转轴的转动以及驱动轮的转动可带动壳体向着阶梯的上方运动,从而实现翻过阶梯,同时由于电机一设置有两个,当两个翻转轴上的驱动轮不是同时与阶梯接触,两个电机一可分别控制两个翻转轴转动,使得机器人的两侧先后翻越到阶梯的上方,防止两个翻转轴同时转动,仅有一个翻转轴运动到阶梯上方,难以带动另一个翻转轴运动到阶梯上方;
32、3、本发明中通过设置带动轴一与带动轴二,带动轴一与带动轴二滑动连接,但是带动轴一与带动轴二不可发生转动,驱动轴带动带动轴一转动,带动轴一带动带动轴二转动,驱动缸二设置在齿轮槽与转轴框之间,驱动缸二伸长推动齿轮槽,齿轮槽上的滑板二在滑板一上滑动,此时齿轮槽带动带动轴二在带动轴一上进行滑动,带动轴一与带动轴二逐渐远离,在带动轴一与带动轴二远离伸长的过程中带动轴一持续带动带动轴二进行转动,带动轴一与带动轴二滑动伸长使得驱动轮与翻转轴的距离增长,当伸长的驱动缸二位于翻转轴的下方,可通过带动轴一与带动轴二的滑动伸长推动机器人向上升起,多个驱动轮中的一个转动到阶梯的上方后,驱动缸二推动驱动轮远离翻转轴,可使得驱动轮转动时可通过阶梯上方地面对机器人有着更大的拉力,避免翻转轴转动后驱动轮转动到阶梯的上方后,翻转轴再转动使得在阶梯上方的驱动轮无法拉动机器人整体从而滑落到阶梯下方,同时由于多个拉伸机构上均设置有驱动缸二以及带动轴一与带动轴二,当其中一个驱动轮转动到阶梯的上方后可通过在阶梯下方的驱动缸二伸长推动翻转轴向上运动,同时在阶梯上方的驱动缸二缩短,使得翻转轴更易通过转动运动到阶梯上方,从而在阶梯路面可平稳的自由运动;
33、4、本发明中通过设置延伸框与驱动缸一,驱动缸一伸长时可推动延伸框在滑轨中滑动,延伸框在滑轨中向远离壳体的方向滑动,可使得翻转轴与转动轮之间的距离加长,前后驱动轮与转轮之间的距离加长可使得机器人在平面路面上运动的更加平稳,当机器人运动到阶梯路面是可通过缩短驱动缸一缩短驱动轮与转动轮之间的距离,使得机器人更易翻越到阶梯上方,同时,在机器人向着较高的阶梯上方翻越时可通过驱动缸一伸长向上推动延伸框带动翻转轴向上运动,使得机器人更易翻越较高的阶梯;
34、5、本发明中通过设置延伸机构,可在平面路面使得机器人变长,在平面路面运行的更加稳定,并可通过延伸机构的伸长缩短推动机器人向阶梯上方翻越,通过设置翻越机构,当机器人运动到阶梯处,可通过翻越机构带动机器人喜爱给你阶梯上方翻越,在翻越的同时驱动轮可时刻转动带动机器人运动,通过设置拉伸机构,可伸长缩短每个驱动轮与翻转轴之间的距离,可通过拉长驱动轮与翻转轴之间的距离推动机器人向阶梯上方运动,并可通过使得在阶梯上方驱动轮与翻转轴之间的距离使得机器人上的翻转轴与延伸框难以掉落到阶梯下方。
本文地址:https://www.jishuxx.com/zhuanli/20241118/329061.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表