位置检测方法、装置、存储介质、程序产品和机器人系统与流程
- 国知局
- 2024-11-19 09:36:24
本发明涉及机器人,具体而言,涉及一种位置检测方法、装置、存储介质、程序产品和机器人系统。
背景技术:
1、在相关技术中,对于扫地机器人、拖地机器人等轮式机器人,其通过当前位置的检测信号来判断机器人是否在位,即判断机器人是否在基站内。
2、当前位置的检测信号通过机器人的第二充电元件与基站的第一充电元件接触来获取,当第二充电元件与第一充电元件接触不良时,当前位置的检测信号可能在“在位”和“不在位”之间频繁切换,出现即使机器人没有离开基站,也判断出机器人不在位的误检测,影响机器人工作效率。
技术实现思路
1、本发明旨在至少解决现有技术或相关技术中存在的技术问题之一。
2、为此,本发明的第一方面提出一种位置检测方法。
3、本发明的第二方面提出一种位置检测装置。
4、本发明的第三方面提出一种位置检测装置。
5、本发明的第四方面提出一种可读存储介质。
6、本发明的第五方面提出一种计算机程序产品。
7、本发明的第六方面提出一种机器人系统。
8、有鉴于此,本发明的第一方面提供了一种位置检测方法,应用于机器人系统,机器人系统包括基站和机器人,基站包括第一充电元件,机器人包括第二充电元件,位置检测方法包括:
9、获取机器人处于当前位置的检测信号,其中,当前位置的检测信号包括第一信号和第二信号,第一信号用于表示第二充电元件与第一充电元件相接触,第二信号用于表示第二充电元件与第一充电元件相分离;在检测到当前位置的检测信号由第一信号变为第二信号时,开启计时;在计时时长达到预设时长后,获取到的当前位置的检测信号仍为第二信号的情况下,向机器人发送第二信号。
10、在该技术方案中,机器人系统具体可以是清洁机器人系统,如拖地机器人系统或扫拖一体机器人系统等。机器人系统具体包括基站和机器人,基站具体用于向机器人充电,以及对机器人清扫到的灰尘进行集尘处理,和对机器人的清洁组件进行清洗。
11、在机器人执行清洁操作的过程中,或者机器人完成清洁操作后,机器人会返回基站内进行待机,以及进行清洗清洁组件、集尘、切割缠绕在清洁刷上的毛发等操作,上述操作需要确定机器人位于基站内的对应位置上,因此需要对机器人的位置进行检测。
12、具体地,基站获取机器人的当前位置的检测信号,当前位置的检测信号具体包括两种信号,分别为第一信号和第二信号,其中,第一信号是机器人“在位”的信号,当机器人在位时,机器人的第二充电元件与基站的第一充电元件相接触,此时基站可以向机器人进行充电,也可以执行如清洗清洁组件、集尘、切割缠绕在清洁刷上的毛发等操作。
13、第二机器人是机器人“不在位”的情况,当机器人不在位时,表示机器人的第二充电元件与基站的第一充电元件之间相分离,当机器人不在位时,对机器人的一些操作可能会终止。
14、在相关技术中,根据机器人的第二充电元件与基站的第一充电元件相接触时的电信号来进行在位检测。在一些情况下,比如机器人的第二充电元件或基站的第一充电元件表面氧化,可能会导致机器人的第二充电元件与基站的第一充电元件之间接触不良,就会导致第二充电元件与第一充电元件之间的回路出现瞬时断开的情况下,反映为机器人没有离开基站的情况下,当前位置的检测信号会突然由“在位”变为“不在位”,因此出现即使机器人没有离开基站,也判断出机器人不在位的误检测,影响机器人工作效率。
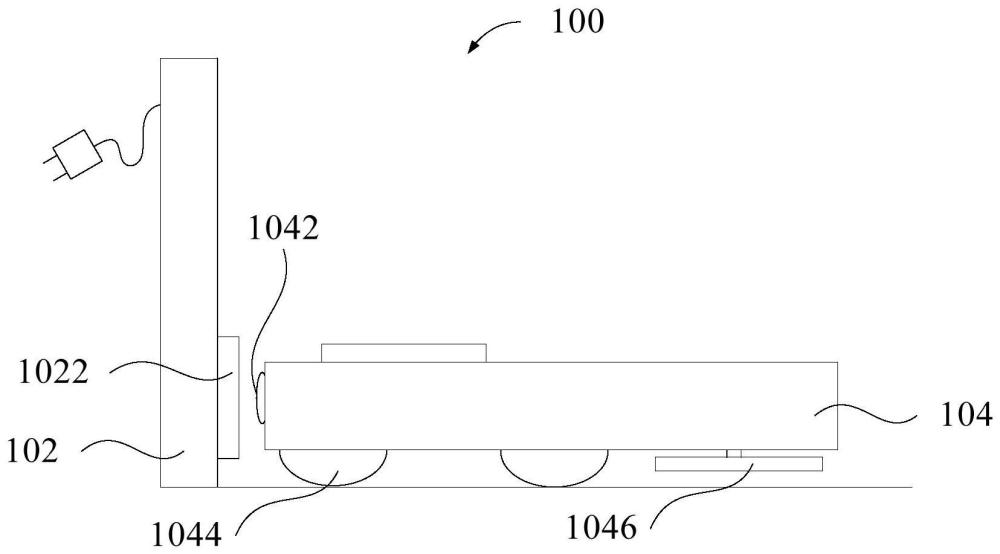
15、其中,第一充电元件具体为基站的弹片,第二充电元件具体为机器人的触点。
16、针对上述情况,本技术在检测到位置信号由表示机器人在位的第一信号,变为表示机器人不在位的第二信号时,不会立刻对机器人不在位的信号进行上报,而是延时预设时长,在延时预设时长后,如果检测到当前位置的检测信号仍为第二信号时,才会向机器人上报不在位的第二信号。
17、如果在延时预设时长后,当前位置的检测信号变回第一信号,则确定检测到的第二信号为误检,不对误检的第二信号进行上报,防止由于信号误检导致机器人的清洗清洁组件、集尘、切割缠绕在清洁刷上的毛发等操作被误检测打断,保证机器人的工作效率。
18、本发明实施例在机器人的在位信号由在位突变为不在位时,对不在位信号进行延时处理,并仅在延时后的当前位置的检测信号仍为不在位时,才会向机器人发送该不在位信号,能够保证位置检测的可靠性,提高机器人的工作效率。
19、另外,本发明提供的上述技术方案中的位置检测方法还可以具有如下附加技术特征:
20、在上述技术方案中,获取当前位置的检测信号的步骤,包括:获取基站的负载信号;确定负载信号的信号值与阈值的比较结果;根据比较结果确定当前位置的检测信号为第一信号或为第二信号。
21、在该技术方案中,通过对基站的负载信号进行检测,并将检测到的负载信号的信号值,与预设的阈值进行比较结果,根据比较结果来判断机器人在位或不在位,具体为判断检测信号是第一信号还是第二信号。
22、具体地,基站能够向机器人进行充电。机器人不在位时,基站的负载是固定的,因此负载信号的信号值也处于一个相对稳定的区间。当在机器人在位时,机器人的第二充电元件与基站的第一充电元件相接触,此时第二充电元件与第一充电元件之间形成回路,基站的负载会产生变化,因此根据基站的负载信号能够准确判断出机器人的第二充电元件是否与基站的第一充电元件接触,也就能够准确判断出机器人是否在位。
23、本发明实施例通过基站的负载信号的信号值与阈值的比较结果,能够准确识别出机器人是否在位,提高机器人在位检测的准确率。
24、在上述任一技术方案中,信号值包括负载电流值和负载电压值,阈值包括电流阈值和电压阈值;
25、根据比较结果确定当前位置的检测信号为第一信号或为第二信号的步骤,包括:在负载电流值小于或等于电流阈值,且负载电压值小于或等于电压阈值的情况下,确定当前位置的检测信号为第一信号;在负载电流值大于电流阈值,且负载电压值大于电压阈值的情况下,确定当前位置的检测信号为第二信号。
26、在该技术方案中,基站的负载信号的信号值,具体包括负载电流值和负载电压值,与之对应的,阈值具体包括电流阈值以及电压阈值。
27、具体地,当检测到负载电流值大于电流阈值,并且同时满足负载电压值大于电压阈值的情况下,则确定机器人的第二充电元件没有与第一充电元件相连接,此时机器人不在位。
28、当检测到负载电流值小于或等于电流阈值,且同时满足负载电压值小于或等于电压阈值时,则确定机器人的第二充电元件与第一充电元件相连接,此时机器人在位。
29、本发明实施例通过基站的负载电流值与电流阈值的比较结果,和基站的负载电压值与电压阈值的比较结果,能够准确识别出机器人是否在位,提高机器人在位检测的准确率。
30、在上述任一技术方案中,负载信号包括连续的n个信号值,n为正整数;确定负载信号的信号值与阈值的比较结果的步骤,包括:
31、分别确定n个信号值与阈值的n个比较结果;根据比较结果确定当前位置的检测信号为第一信号或为第二信号的步骤,包括:在n个比较结果中,满足第一信号对应的预设条件的比较结果的数量,大于或等于满足第二信号对应的预设条件的比较结果的数量的情况下,确定当前位置的检测信号为第一信号;
32、在n个比较结果中,满足第一信号对应的预设条件的比较结果的数量,小于满足第二信号对应的预设条件的比较结果的数量的情况下,确定当前位置的检测信号为第二信号。
33、在该技术方案中,增加对当前位置的检测信号的滤波处理。具体地,在采集基站的负载信号时,按照预设的采集周期,连续采集负载信号的n个信号值,并分别确定这n个信号值中的每一个信号值,与信号阈值的比较结果,并在比较得到的n个比较结果中,确定满足第一信号的预设条件的比较结果的数量,和满足第二信号的预设条件的比较结果的数量。
34、示例性地,n个信号值可以是在一定时长内采集到信号值,如1.5秒内采集到的信号值。
35、如果满足第一信号对应的预设条件的比较结果的数量,大于等于满足第二信号的预设条件的比较结果的数量,则确定当前位置的检测信号具体为第一信号,机器人在位。
36、同理,如果满足第二信号对应的预设条件的比较结果的数量,大于满足第一信号的预设条件的比较结果的数量,则确定当前位置的检测信号具体为第二信号,机器人不在位。
37、具体地,n个信号值包括n个电流值,和与n个电流值一一对应的n个电压值,每个电流值与对应的电压值为一组数据,因此共有n组数据。
38、当一组数据满足电流值小于或等于电流阈值,且电压值小于或等于电压阈值时,则确定该组数据,也即该信号值满足第一信号对应的预设条件。
39、当一组数据满足电流值大于电流阈值,且电压值大于电压阈值时,则确定该组数据,也即该信号值满足第二信号对应的预设条件。
40、假设n=40,也即获取到40个信号值中,有大于或等于20个信号值满足第一信号对应的预设条件,则确定当前位置的检测信号具体为第一信号。如果有大于或等于21个信号值满足第二信号对应的预设条件,则确定当前检测信号具体为第二信号。
41、本技术实施例通过对基站的负载信号进行一定时长的滤波,根据采集到的n个信号值中,判断结果占比较多的一方来确定机器人是否在位,能够有效减少因第一充电元件和第二充电元件接触不良导致的误检测,提高机器人在位检测的可靠性和准确性。
42、在上述任一技术方案中,电流阈值的取值范围为:大于或等于20ma,且小于或等于40ma;电压阈值的取值范围为:大于或等于2.1v,且小于或等于4v。
43、在该技术方案中,设电流阈值为a,则满足20ma≤a≤40ma。
44、示例性地,电流阈值为28ma。
45、示例性地,电流阈值为30ma。
46、设电压阈值为u,则满足2.1v≤u≤4v。
47、示例性地,电压阈值为3.1v。
48、示例性地,电压阈值为2.8v。
49、当采集到的负载电流小于或等于电流阈值,且采集到的负载电压小于或等于电压阈值时,则确定采集到的机器人所处的当前位置的检测信号具体为第一信号。当采集到的负载电流大于电流阈值,且采集到的负载电压大于电压阈值时,则确定采集到的机器人所处的当前位置的检测信号具体为第一信号。
50、本发明实施例通过基站的负载电流、负载电压与对应的电流阈值和电压阈值的比较结果,能够准确识别出基站的弹片是否输出功率信号,即机器人的触点与基站的弹片是否接触,从而判断出机器人是否在位,提高机器人在位检测的准确率。
51、在上述任一技术方案中,n的取值范围为:25≤n≤55。
52、在该技术方案中,在采集基站的负载信号时,按照预设的采集周期,连续采集负载信号的n个信号值,其中,n为大于或等于25,且小于或等于55的整数。
53、示例性地,n=45。
54、示例性地,n=40。
55、以n=40为例,在1.5秒内,每间隔37.5ms,采集一个信号值,在1.5秒内共采集得到40个信号值。如果40个信号值中,有大于或等于20个信号值满足第一信号对应的预设条件,则确定当前位置的检测信号具体为第一信号。如果有大于或等于21个信号值满足第二信号对应的预设条件,则确定当前检测信号具体为第二信号。
56、本发明实施例通过采集连续的n个信号值,基于n个信号值中判定结果为第一信号的数量和判定结果为第二信号的数量的比较结果来确定最终的位置检测结果,并通过适当设定信号值的数量,能够在保证位置检测结果的时效性的同时,提高检测准确率和可信度。
57、在上述任一技术方案中,机器人还包括走行轮;在向机器人发送第二信号的步骤之后,位置检测方法还包括:在机器人的工作模式为第一模式,且未检测到走行轮的抬起信号的情况下,控制机器人向靠近第一充电元件的方向运动预设次数。
58、在该技术方案中,机器人具体为轮式机器人,机器人包括走行轮,走行轮用于驱动机器人运动。走行轮上设置有传感器,用于检测机器人的走行轮是否抬起。其中,当走行轮抬起时,传感器生成抬起信号,该抬起信号用于表示机器人的走行轮离地,即用户手动抱起了机器人。
59、在向机器人发送第二信号,也即发送机器人不在位的信号后,进一步获取机器人的工作模式。具体地,在机器人工作时,可能会由于机器人工作中产生的振动或摩擦,导致机器人相对基站产生位移,致使第二充电元件与第一充电元件相分离。
60、其中,第一模式具体是会导致机器人位移,但不强制要求机器人在位的工作模式。
61、因此,在机器人接收到基站发送的第二信号后,确定当前工作模式。如果确定当前工作模式为第一模式,且没有检测到抬起信号,也即用户没有抱起机器人时,判断第二信号可能是因为机器人以第一模式工作时产生的振动或摩擦导致了位置偏离,此时控制机器人向内,具体为向靠近基站的第一充电元件的方向运动,具体运动预设次数,使机器人重新回位。
62、示例性地,预设次数为5次。
63、示例性地,预设次数为3次。
64、本发明实施例通过在检测到机器人不在位,且机器人处于可能产生振动或摩擦的工作模式时,控制机器人向内运动若干次数,从而使偏离位置的机器人重新回到基站内的预设位置,保证机器人的工作可靠性。
65、在上述任一技术方案中,第一模式包括:集尘模式、烘干模式或切割毛发模式。
66、在该技术方案中,第一模式包括集尘模式,具体地,集尘模式是基站通过风机等结构将机器人清扫收集到的灰尘,由机器人的尘盒中吸引到基站中设置的集尘袋内的工作模式。
67、第一模式还包括烘干模式,具体地,烘干模式是基站通过热风烘干机器人的清扫组件,具体为清扫组件上设置的抹布盘的工作模式。
68、第一模式还包括切割毛发模式,具体地,在机器人执行清洁操作的过程中,机器人的清扫滚刷会旋转收集地面上的浮尘和垃圾。当垃圾中存在毛发时,毛发可能会缠绕在清扫滚刷本体或清扫滚刷的转轴上。切割毛发模式就是通过切割刀片,将缠绕在滚刷本体或滚刷转轴上的毛发切断,使其脱离滚刷的工作模式。
69、在上述任一技术方案中,机器人还包括走行轮和清洁组件;在向机器人发送第二信号的步骤之后,位置检测方法还包括:在机器人的工作模式为第二模式,且未检测到走行轮的抬起信号的情况下,控制机器人向靠近第一充电元件的方向运动预设次数;在机器人运动预设次数后再次接收到第二信号的情况下,控制机器人停止工作并执行提醒操作;其中,第二模式为清洁组件的自清洁模式。
70、在该技术方案中,机器人具体为轮式机器人,机器人包括走行轮,走行轮用于驱动机器人运动。走行轮上设置有传感器,用于检测机器人的走行轮是否抬起。其中,当走行轮抬起时,传感器生成抬起信号,该抬起信号用于表示机器人的走行轮离地,即用户手动抱起了机器人。
71、清洁组件具体为拖地组件,拖地组件包括驱动部和抹布盘,在一些实施方式中,驱动部驱动抹布盘旋转来执行清洁操作,在另一些实施方式中,驱动部驱动抹布盘高频振动来执行清洁操作,在又一些实施方式中,驱动部驱动抹布盘往复运动来执行清洁操作。
72、在向机器人发送第二信号,也即发送机器人不在位的信号后,进一步获取机器人的工作模式。具体地,在机器人工作时,可能会由于机器人工作中产生的振动或摩擦,导致机器人相对基站产生位移,致使第二充电元件与第一充电元件相分离。
73、其中,第二模式具体是会导致机器人位移,且需要机器人保持在固定位置上的工作模式。具体地,第二模式为对清洁组件进行清洗的自清洁模式。在第二模式下,机器人将清扫组件上的抹布盘移动至基站的清洗槽内,并按照设定好的方式旋转抹布盘,来实现对抹布盘的清洗。
74、在机器人接收到基站发送的第二信号后,确定当前工作模式。如果确定当前工作模式为第二模式,也即自清洁模式,且没有检测到抬起信号,也即用户没有抱起机器人时,则判断第二信号可能是因为机器人旋转抹布盘的作用力导致了位置偏离,此时控制机器人向内,具体为向靠近基站的第一充电元件的方向运动,具体运动预设次数,使机器人重新回位。
75、示例性地,预设次数为5次。
76、示例性地,预设次数为3次。
77、在控制机器人向内运动预设次数后,如果机器人再次接收到了第二信号,则说明机器人没有成功复位,此时抹布盘的至少部分可能已经到了清洁槽外,此时控制机器人停止工作,也即停止清洗抹布盘,控制抹布盘停止旋转,并按照预设的方式进行提醒,提醒用户手动复位机器人。
78、本发明实施例通过在检测到机器人不在位,且机器人处于自清洁的工作模式时,尝试控制机器人向内运动若干次数,使偏离位置的机器人重新回到基站内的预设位置。如果在常识复位后,仍然检测到机器人不在位的第二信号,则控制机器人停止工作并进行提醒,避免机器人故障受损,提高机器人的工作可靠性。
79、在上述任一技术方案中,提醒操作包括:播报预设提醒信息;和/或将预设提醒信息发送至目标终端。
80、在该技术方案中,在机器人处于清洗抹布盘的自清洁模式下,如果检测到机器人不在位的第二信号,且自动复位失败时,机器人执行提醒操作。
81、其中,机器人上设置有扬声器,提醒操作具体包括通过扬声器播放预设的提醒信息,从而提醒周围的用户机器人位置偏离,提醒用户手动帮助机器人复位。
82、机器人还可以通过物联网或者家庭网关访问互联网,通过互联网向用户持有的目标终端,如用户的手机上发送提醒消息,告知用户机器人位置偏离且工作停止,提醒用户手动处理异常。
83、本发明第二方面提供了一种位置检测装置,应用于机器人系统,机器人系统包括基站和机器人,基站包括第一充电元件,机器人包括第二充电元件,位置检测装置包括:
84、获取模块,用于获取机器人处于当前位置的检测信号,其中,当前位置的检测信号包括第一信号和第二信号,第一信号用于表示第二充电元件与第一充电元件相接触,第二信号用于表示第二充电元件与第一充电元件相分离;计时模块,用于在检测到当前位置的检测信号由第一信号变为第二信号时,开启计时;发送模块,用于在计时时长达到预设时长后,获取到的当前位置的检测信号仍为第二信号的情况下,向机器人发送第二信号。
85、在该技术方案中,机器人系统具体可以是清洁机器人系统,如拖地机器人系统或扫拖一体机器人系统等。机器人系统具体包括基站和机器人,基站具体用于向机器人充电,以及对机器人清扫到的灰尘进行集尘处理,和对机器人的清洁组件进行清洗。
86、在机器人执行清洁操作的过程中,或者机器人完成清洁操作后,机器人会返回基站内进行待机,以及进行清洗清洁组件、集尘、切割缠绕在清洁刷上的毛发等操作,上述操作需要确定机器人位于基站内的对应位置上,因此需要对机器人的位置进行检测。
87、具体地,基站获取机器人的当前位置的检测信号,当前位置的检测信号具体包括两种信号,分别为第一信号和第二信号,其中,第一信号是机器人“在位”的信号,当机器人在位时,机器人的第二充电元件与基站的第一充电元件相接触,此时基站可以向机器人进行充电,也可以执行如清洗清洁组件、集尘、切割缠绕在清洁刷上的毛发等操作。
88、第二机器人是机器人“不在位”的情况,当机器人不在位时,表示机器人的第二充电元件与基站的第一充电元件之间相分离,当机器人不在位时,对机器人的一些操作可能会终止。
89、在相关技术中,根据机器人的第二充电元件与基站的第一充电元件相接触时的电信号来进行在位检测。在一些情况下,比如机器人的第二充电元件或基站的第一充电元件表面氧化,可能会导致机器人的第二充电元件与基站的第一充电元件之间接触不良,就会导致第二充电元件与第一充电元件之间的回路出现瞬时断开的情况下,反映为机器人没有离开基站的情况下,当前位置的检测信号会突然由“在位”变为“不在位”,因此出现即使机器人没有离开基站,也判断出机器人不在位的误检测,影响机器人工作效率。
90、其中,第一充电元件具体为基站的弹片,第二充电元件具体为机器人的触点。
91、针对上述情况,本技术在检测到位置信号由表示机器人在位的第一信号,变为表示机器人不在位的第二信号时,不会立刻对机器人不在位的信号进行上报,而是延时预设时长,在延时预设时长后,如果检测到当前位置的检测信号仍为第二信号时,才会向机器人上报不在位的第二信号。
92、如果在延时预设时长后,当前位置的检测信号变回第一信号,则确定检测到的第二信号为误检,不对误检的第二信号进行上报,防止由于信号误检导致机器人的清洗清洁组件、集尘、切割缠绕在清洁刷上的毛发等操作被误检测打断,保证机器人的工作效率。
93、本发明实施例在机器人的在位信号由在位突变为不在位时,对不在位信号进行延时处理,并仅在延时后的当前位置的检测信号仍为不在位时,才会向机器人发送该不在位信号,能够保证位置检测的可靠性,提高机器人的工作效率。
94、本发明第三方面提供了一种位置检测装置,包括:存储器,用于存储程序或指令;处理器,用于执行程序或指令时实现如上述任一技术方案中提供的位置检测方法的步骤,因此也包括其全部技术效果,为避免重复,在此不再赘述。
95、本发明第四方面提供了一种可读存储介质,可读存储介质上存储程序或指令,程序或指令被处理器执行时实现如上述任一技术方案中提供的位置检测方法的步骤,因此也包括其全部技术效果,为避免重复,在此不再赘述。
96、本发明第五方面提供了一种计算机程序产品,计算机程序产品被存储在存储介质中,计算机程序产品被至少一个处理器执行时实现如上述任一技术方案中提供的位置检测方法的步骤,因此也包括其全部技术效果,为避免重复,在此不再赘述。
97、本发明第六方面提供了一种机器人系统,包括:如上述任一技术方案中提供的位置检测装置;和/或如上述任一技术方案中提供的可读存储介质;和/或如上述任一技术方案中提供的计算机程序产品,因此也包括其全部技术效果,为避免重复,在此不再赘述。
本文地址:https://www.jishuxx.com/zhuanli/20241118/329468.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表