水翼载具定高飞行的控制方法、载具及系统与流程
- 国知局
- 2024-11-19 09:44:49
本技术涉及载具运动状态控制领域,具体而言,涉及一种水翼载具定高飞行的控制方法、载具及系统。
背景技术:
1、目前,在一般的电动水翼板飞行控制中,需由站在板体上的驾乘者通过调整自身的重心位置来控制电动水翼板的飞行俯仰角,这种方式存在以下缺点:电动水翼板的平稳飞行对重心位置要求较高,重心位置的调整需要精细、迅速且准确,这要求驾乘者具备丰富的经验和技巧;驾乘者需要在飞行过程中频繁的调整重心,以使电动水翼板在合适的高度飞行,驾乘者负担较重,尤其是长时间飞行时容易造成驾乘者疲惫、体验变差;在带控制系统的电动水翼板飞行控制中,一般通过舵面(升降舵)控制电动水翼板的飞行俯仰角,这种方式存在以下缺点:水翼板必须增加舵面、驱动器、传动系统等部件,大幅度增加水翼板结构复杂度及产品重量;传动系统提高了产品的防水需求;增加了额外的维护工作量和维护成本。
技术实现思路
1、本技术的主要目的在于提供一种水翼载具定高飞行的控制方法、载具及系统,以实现通过控制油门及动力输出对电动水翼载具的定高飞行状态进行控制。
2、为了实现上述目的,本技术提供了:一种水翼载具定高飞行的控制方法,方法包括:
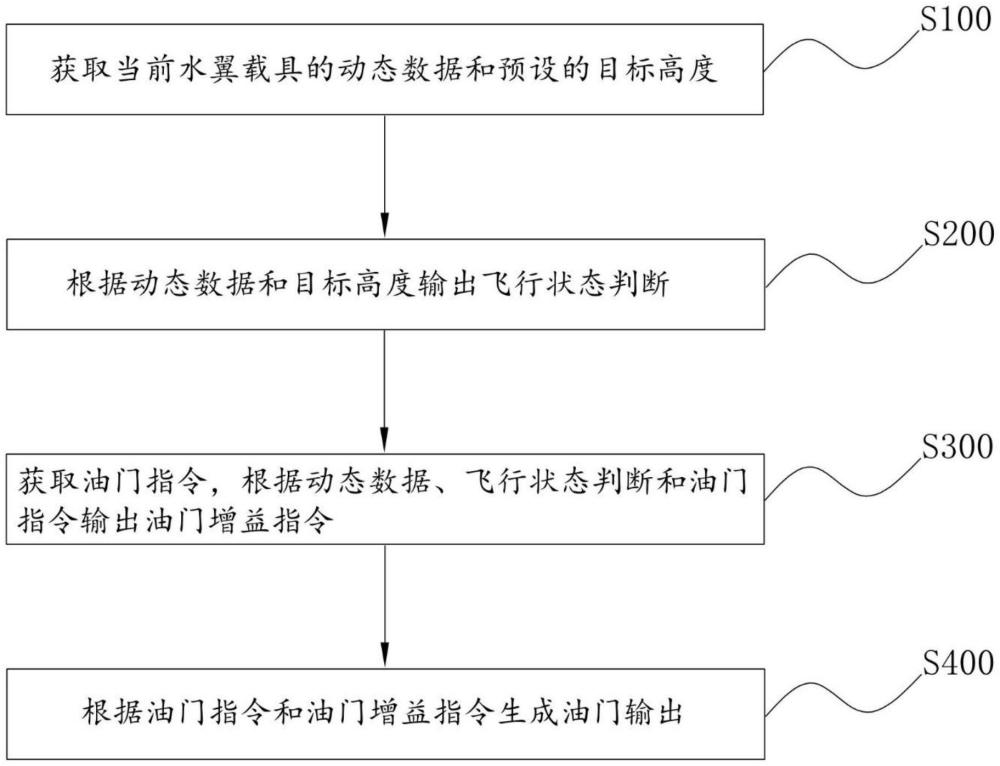
3、获取当前水翼载具的动态数据和预设的目标高度;
4、根据动态数据和目标高度输出飞行状态判断;
5、获取油门指令,根据动态数据、飞行状态判断和油门指令输出油门增益指令;
6、根据油门指令和油门增益指令生成油门输出。
7、进一步,所述动态数据包括高度数据,所述根据动态数据和目标高度输出飞行状态判断,获取油门指令,根据动态数据、飞行状态判断和油门指令输出油门增益指令,根据油门指令和油门增益指令生成油门输出的方法包括:
8、判断高度数据是否符合预设的目标高度,具体的:
9、当高度数据符合或高于目标高度时,飞行状态判断为飞行状态,
10、当高度数据低于目标高度时,飞行状态判断为非飞行状态;
11、当飞行状态判断为飞行状态时,根据动态数据和油门指令输出油门增益指令,根据油门指令和油门增益指令生成油门输出,以实现保持飞行高度。
12、进一步,所述动态数据包括高度数据和爬升速度数据,所述获取油门指令,根据动态数据、飞行状态判断和油门指令输出油门增益指令,根据油门指令和油门增益指令生成油门输出的方法包括:
13、判断高度数据是否符合预设的目标高度,具体的:
14、当高度数据符合或高于目标高度时,飞行状态判断为飞行状态,
15、当高度数据低于目标高度时,飞行状态判断为非飞行状态;
16、根据高度数据和预设的目标高度输出爬升速度指令;
17、当飞行状态判断为飞行状态时,根据爬升速度数据和爬升速度指令,结合油门指令输出油门增益指令,根据油门指令和油门增益指令生成油门输出,以实现保持飞行高度。
18、进一步,所述动态数据包括高度数据、爬升速度数据和爬升加速度数据,所述获取油门指令,根据动态数据、飞行状态判断和油门指令输出油门增益指令的方法包括:
19、判断高度数据是否符合预设的目标高度,具体的:
20、当高度数据符合或高于目标高度时,飞行状态判断为飞行状态,
21、当高度数据低于目标高度时,飞行状态判断为非飞行状态;
22、根据高度数据和预设的目标高度输出爬升速度指令;
23、根据爬升速度数据和爬升速度指令输出爬升加速度指令;
24、当飞行状态判断为飞行状态时,根据爬升加速度指令和爬升加速度数据,结合油门指令输出油门增益指令,根据油门指令和油门增益指令生成油门输出,以实现保持飞行高度。
25、进一步,所述动态数据包括高度数据和飞行速度数据,所述根据动态数据和目标高度输出飞行状态判断的方法包括:
26、s1:获取当前油门开度,判断当前油门是否大于完成目标高度起飞的最小油门,若大于,则跳转s2,否则跳转s6;
27、s2:根据飞行速度数据,判断当前飞行速度是否大于完成目标高度起飞的最小起飞速度,若大于,则跳转s3,否则跳转s6;
28、s3:根据高度数据,判断当前飞行高度是否大于完成目标高度起飞的最小飞行高度,若大于,则跳转s4,否则跳转s6;
29、s4:根据高度数据,判断当前飞行高度是否大于目标高度,若是,则跳转s7,否则跳转s5;
30、s5:若目标高度判断计时器未初始化,则记录当前系统时间为目标高度判断计时器初始化时间,并跳转s9,若目标高度判断计时器已初始化,则计算当前系统时间与目标高度判断计时器初始化时间之间的时间差是否大于目标高度判断计时周期,若大于则跳转s7,否则跳转s9;
31、s6:若非目标高度判断计时器未初始化,则记录当前系统时间为非目标高度判断计时器初始化时间,并跳转s9,若非目标高度判断计时器已初始化,则计算当前系统时间与非目标高度判断计时器初始化时间之间的时间差是否大于非目标高度判断计时周期,若大于则跳转s8,否则跳转s9;
32、s7:将水翼载具的飞行状态判断置为飞行状态,非目标高度判断计时器置为非初始化状态,跳转s9;
33、s8:将水翼载具的飞行状态判断置为非飞行状态,目标高度判断计时器置为非初始化状态,跳转s9;
34、s9:等待下一轮判断。
35、进一步,所述动态数据还包括爬升速度数据,所述获取油门指令,根据动态数据、飞行状态判断和油门指令输出油门增益指令,根据油门指令和油门增益指令生成油门输出的方法包括:
36、当飞行状态判断为飞行状态时,根据爬升速度数据和爬升速度指令,结合油门指令输出油门增益指令,根据油门指令和油门增益指令生成油门输出,以实现保持飞行高度。
37、进一步,所述动态数据还包括爬升速度数据和爬升加速度数据,所述获取油门指令,根据动态数据、飞行状态判断和油门指令输出油门增益指令,根据油门指令和油门增益指令生成油门输出的方法包括:
38、根据高度数据和预设的目标高度输出爬升速度指令;
39、根据爬升速度数据和爬升速度指令输出爬升加速度指令;
40、当飞行状态判断为飞行状态时,根据爬升加速度指令和爬升加速度数据,结合油门指令输出油门增益指令,根据油门指令和油门增益指令生成油门输出,以实现保持飞行高度。
41、进一步,所述动态数据还包括俯仰数据,所述获取油门指令,根据动态数据、飞行状态判断和油门指令输出油门增益指令的方法包括:
42、根据高度数据和预设的目标高度输出目标俯仰角指令;
43、根据飞行状态判断开启或关闭第一俯仰角指令,具体的:
44、在飞行状态判断为高于预设最小起飞高度时开启第一俯仰角指令并输出;
45、在飞行状态判断为低于预设最小起飞高度时关闭第一俯仰角指令,并输出预设俯仰角指令,并在通过预设俯仰角指令起飞至高于预设最小起飞高度后开启目标俯仰角指令并输出;
46、根据油门指令、俯仰数据和第一俯仰角指令输出油门指令俯仰角增益;
47、根据油门指令和油门指令俯仰角增益输出油门增益指令。
48、进一步,所述俯仰数据包括俯仰角数据、俯仰角速率数据和俯仰角加速度数据,所述根据油门指令、俯仰数据和第一俯仰角指令输出油门指令俯仰角增益的方法包括:
49、根据目标俯仰角指令和俯仰角数据输出俯仰角速率指令;
50、根据俯仰角速率指令和俯仰角速率数据输出俯仰角加速度指令;
51、根据油门指令、俯仰角加速度指令和俯仰角加速度数据输出油门指令俯仰角加速度增益;
52、根据油门指令和油门指令俯仰角加速度增益输出油门增益指令。
53、进一步,所述根据油门指令和油门增益指令生成油门输出的方法包括:
54、获取油门扳机的位置信息tlocation;
55、根据油门扳机的位置信息tlocation计算当前最大的油门增益指令ttri_max:
56、ttri_max=kt*tlocation*tcal_max,
57、其中,kt为预设的比例参数,tcal_max为预设的最大增益限制;
58、设置油门增益指令ttri∈(-ttri_max,ttri_max);
59、根据油门指令和油门增益指令生成油门输出。
60、进一步,所述根据油门指令和油门增益指令生成油门输出,具体的:
61、根据油门指令和油门增益指令按照预设的油门曲线进行平滑和滤波,并生成油门输出。
62、本实施例进一步公开了一种电动水翼载具,包括载体,所述载体朝向水面的一侧设置有桅杆,所述桅杆的端部设置有用于提供升力的水翼部件,所述桅杆靠近水翼部件的一端或与水翼部件相连设置有用于驱动水翼载具的动力单元;
63、还包括控制器,所述控制器与所述动力单元通信连接,用于控制所述动力单元实现上述的水翼载具定高飞行的控制方法。
64、本实施例进一步公开了一种电动水翼载具定高飞行的控制系统,控制系统包括:
65、动态数据获取模块,用于当前水翼载具的动态数据和预设的目标高度;
66、飞行状态判断模块,用于根据动态数据和目标高度输出飞行状态判断;
67、控制器模块,用于获取油门指令,根据动态数据、飞行状态判断和油门指令输出油门增益指令;
68、油门控制模块,用于根据油门指令和油门增益指令生成油门输出。
69、本实施例进一步公开了一种电子设备,电子设备包括:至少一个处理器和至少一个存储器;存储器用于存储一个或多个程序指令;处理器,用于运行一个或多个程序指令,用以执行上述的定高飞行控制方法。
70、本实施例进一步公开了一种计算机可读存储介质,计算机存储介质中包含一个或多个程序指令,一个或多个程序指令用于执行上述的定高飞行控制方法。
71、本发明提供的水翼载具定高飞行的控制方法、水翼载具及系统,与现有技术相比,其有益效果为:
72、1、在整体的控制设计上,通过获取的水翼载具的动态数据对油门输出进行控制,实现水翼载具的实时高度低于设定时加大油门,水翼载具的高度高于设定时降低油门的控制效果,无需在水翼载具上设置传统的用于控制载具姿态的装置,使得本水翼载具的结构更加简单,在使用过程中更加稳定;
73、2、在输出油门控制之前,通过设计的载具飞行状态判断,结合水翼载具进一步的动态数据输出油门增益,可以在油门指令的基础上进一步精细控制油门的输出,避免由于用户的操作失误造成油门过大或过小导致发生意外。
本文地址:https://www.jishuxx.com/zhuanli/20241118/330039.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。