基于协同滤波算法的民用异构无人集群控制方法及系统
- 国知局
- 2024-11-21 11:37:42
本技术涉及智能控制相关领域,尤其涉及基于协同滤波算法的民用异构无人集群控制方法及系统。
背景技术:
1、近年来,无人机集群技术概念的提出及发展,有效解决了单个无人机作业时载荷相对较小,信息感知处理能力相对较弱的不足。无人机集群技术的研究与应用已成为无人机技术发展的一个重要方向,无人机集群不但能通过单机间的密切协作,有效提升载荷能力和信息处理能力,并且无人机集群具有很高的“自愈”能力和很强的鲁棒性,随着无人机集群作业自主性、智能化、多任务等方面要求的提高,无人机从单机作业发展到集群作业,对多机集群通信技术提出了更高的要求,在现有技术中存在缺乏对民用异构无人集群的管控,导致民用异构无人集群存在任务执行的协同效率低的技术问题。
技术实现思路
1、本技术通过提供基于协同滤波算法的民用异构无人集群控制方法及系统,解决缺乏对民用异构无人集群的管控,导致民用异构无人集群的任务执行的协同效率低的技术问题,实现合理化精准管控,提高民用异构无人集群的协同效率和任务执行能力的技术效果。
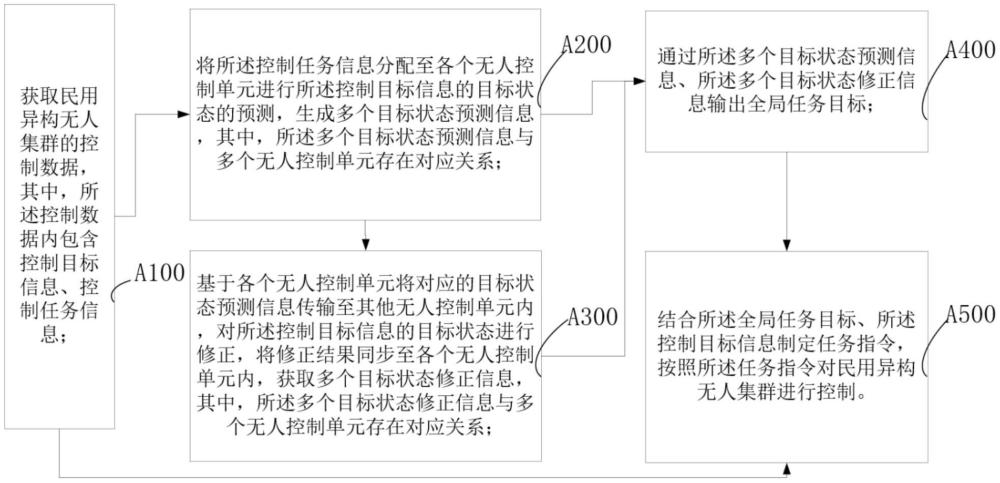
2、本技术提供基于协同滤波算法的民用异构无人集群控制方法,所述方法应用于基于协同滤波算法的民用异构无人集群控制系统,所述基于协同滤波算法的民用异构无人集群控制系统与多个无人控制单元通信连接,包括:获取民用异构无人集群的控制数据,其中,所述控制数据内包含控制目标信息、控制任务信息;
3、将所述控制任务信息分配至各个无人控制单元进行所述控制目标信息的目标状态的预测,生成多个目标状态预测信息,其中,所述多个目标状态预测信息与多个无人控制单元存在对应关系;
4、基于各个无人控制单元将对应的目标状态预测信息传输至其他无人控制单元内,对所述控制目标信息的目标状态进行修正,将修正结果同步至各个无人控制单元内,获取多个目标状态修正信息,其中,所述多个目标状态修正信息与多个无人控制单元存在对应关系;
5、通过所述多个目标状态预测信息、所述多个目标状态修正信息输出全局任务目标;
6、结合所述全局任务目标、所述控制目标信息制定任务指令,按照所述任务指令对民用异构无人集群进行控制。
7、在可能的实现方式中,获取民用异构无人集群的控制数据,执行以下处理:调取民用异构无人集群内的多个无人控制单元进行多维信息采集,获取多维原始数据;
8、通过对所述多维原始数据进行解析,生成多个解析信息,其中,所述多个解析信息包含状态信息、传感信息、任务执行信息;
9、基于所述状态信息、所述传感信息进行信息融合,生成民用异构无人集群的所述控制目标信息;
10、基于所述状态信息、所述任务执行信息进行信息融合,生成民用异构无人集群的所述控制任务信息;
11、将所述控制目标信息、所述控制任务信息添加至民用异构无人集群的所述控制数据。
12、在可能的实现方式中,将所述控制任务信息分配至各个无人控制单元进行所述控制目标信息的目标状态的预测,生成多个目标状态预测信息,执行以下处理:基于多个无人控制单元提取第一无人控制单元;
13、利用协同滤波算法对所述第一无人控制单元的历史目标数据进行分析,根据分析结果结合所述第一无人控制单元的感知数据、测量数据,以及其余无人控制单元的共享信息对目标状态进行预测评价,输出第一目标状态预测评分,以此进行迭代,生成多个无人控制单元的多个目标状态预测评分;
14、将所述多个目标状态预测评分添加至所述多个目标状态预测信息。
15、在可能的实现方式中,对目标状态进行预测评价,执行以下处理:构建预测评分表达式,如下:
16、
17、其中,x为第一无人控制单元,y为第二无人控制单元,a为第一目标状态,pred(x,a)为预测第一无人控制单元对第一目标状态的评分,xavg为第一无人控制单元的平均评分,vavg为第二无人控制单元的平均评分,r(y,a)为第一无人控制单元对第一目标状态的实际评分,为第一无人控制单元与第二无人控制单元的相似度,i为特征编号。
18、在可能的实现方式中,基于各个无人控制单元将对应的目标状态预测信息传输至其他无人控制单元内,对所述控制目标信息的目标状态进行修正,将修正结果同步至各个无人控制单元内,获取多个目标状态修正信息,执行以下处理:结合第一目标状态预测信息,基于第n无人控制单元利用协同滤波算法进行目标状态的修正,生成所述修正结果,其中,所述第一目标状态预测信息与所述第一无人控制单元一一对应,且所述第n无人控制单元不包含所述第一无人控制单元;
19、通过点对点通信将所述修正结果同步至各个无人控制单元内,并对各个无人控制单元的输出数据进行采集,获取所述多个目标状态修正信息。
20、在可能的实现方式中,通过所述多个目标状态预测信息、所述多个目标状态修正信息输出全局任务目标,执行以下处理:利用数据融合算法结合所述多个目标状态预测信息、所述多个目标状态修正信息进行全局状态的估计,生成全局目标状态信息;
21、对所述全局目标状态信息进行数据蒸馏,输出任务状态期望数据;
22、基于所述任务状态期望数据制定所述全局任务目标。
23、在可能的实现方式中,结合所述全局任务目标、所述控制目标信息制定任务指令,执行以下处理:基于所述控制目标信息制定任务规划数据;
24、按照执行能力对各个无人控制单元进行加权计算,生成加权计算结果;
25、根据所述加权计算结果标识目标任务的优先级,基于优先级按照所述全局任务目标制定分配策略;
26、根据所述任务规划数据和所述分配策略为各个无人控制单元制定所述任务指令。
27、本技术还提供了基于协同滤波算法的民用异构无人集群控制系统,包括:
28、数据获取模块,所述数据获取模块用于获取民用异构无人集群的控制数据,其中,所述控制数据内包含控制目标信息、控制任务信息;
29、第一预测模块,所述第一预测模块用于将所述控制任务信息分配至各个无人控制单元进行所述控制目标信息的目标状态的预测,生成多个目标状态预测信息,其中,所述多个目标状态预测信息与多个无人控制单元存在对应关系;
30、第一修正模块,所述第一修正模块用于基于各个无人控制单元将对应的目标状态预测信息传输至其他无人控制单元内,对所述控制目标信息的目标状态进行修正,将修正结果同步至各个无人控制单元内,获取多个目标状态修正信息,其中,所述多个目标状态修正信息与多个无人控制单元存在对应关系;
31、目标输出模块,所述目标输出模块用于通过所述多个目标状态预测信息、所述多个目标状态修正信息输出全局任务目标;
32、第一控制模块,所述第一控制模块用于结合所述全局任务目标、所述控制目标信息制定任务指令,按照所述任务指令对民用异构无人集群进行控制。
33、本技术中提供的一个或多个技术方案,至少具有如下技术效果或优点:
34、本技术提供的基于协同滤波算法的民用异构无人集群控制方法及系统,涉及智能控制技术领域,解决缺乏对民用异构无人集群的管控,导致民用异构无人集群的任务执行的协同效率低的技术问题,实现合理化精准管控,提高民用异构无人集群的协同效率和任务执行能力的技术效果。
本文地址:https://www.jishuxx.com/zhuanli/20241120/332089.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。