结合双目相机与LiDAR的混凝土曲面结构裂缝定位与分析方法
- 国知局
- 2024-11-21 11:38:59
本发明涉及机器视觉,特别是指一种结合双目相机与lidar的混凝土曲面结构裂缝定位与分析方法。
背景技术:
1、混凝土结构在服役期间耐久性的丧失会造成巨大的经济和社会损失。近年来,频繁发生的混凝土结构坍塌事故更加突显了监测在役基础设施健康状况并及时进行维护的重要性。因此,通过检测混凝土结构的裂缝并准确定位,可以在损伤初期进行有效的维护管理,显著延长基础设施的使用寿命,减少事故的发生。
2、随着科技的快速发展,众多新兴技术已经减少了检测和维护阶段的资金消耗,同时也大幅提升了工作效率。裂缝检测的方法从最初的人工接触式检查演变为现代的自动化非接触式检测。特别是计算机视觉的持续发展,使得业界开始采用数字图像处理技术来检测裂缝。这种技术通过结合高分辨率图像采集和计算机视觉分析,能够自动化地识别裂缝,极大地提升了检测效率和准确度。
3、然而,基于图像的方法由于相机分辨率和算法识别精度的限制,通常只能检测到结构的部分区域,无法直接提供裂缝的三维位置和实际尺寸信息。此外,当对象为曲面结构或拍摄角度倾斜时,基于二维图像的裂纹量化往往不够准确。
技术实现思路
1、本发明提供了一种结合双目相机与lidar的混凝土曲面结构裂缝定位与分析方法,以解决传统的基于图像的裂缝检测方法无法准确获取完整裂缝信息,以及在非正摄拍摄角度下,裂缝信息分析不准的技术问题。
2、为解决上述技术问题,本发明提供了如下技术方案:
3、一方面,本发明提供了一种结合双目相机与lidar的混凝土曲面结构裂缝定位与分析方法,所述混凝土曲面结构裂缝定位与分析方法包括:
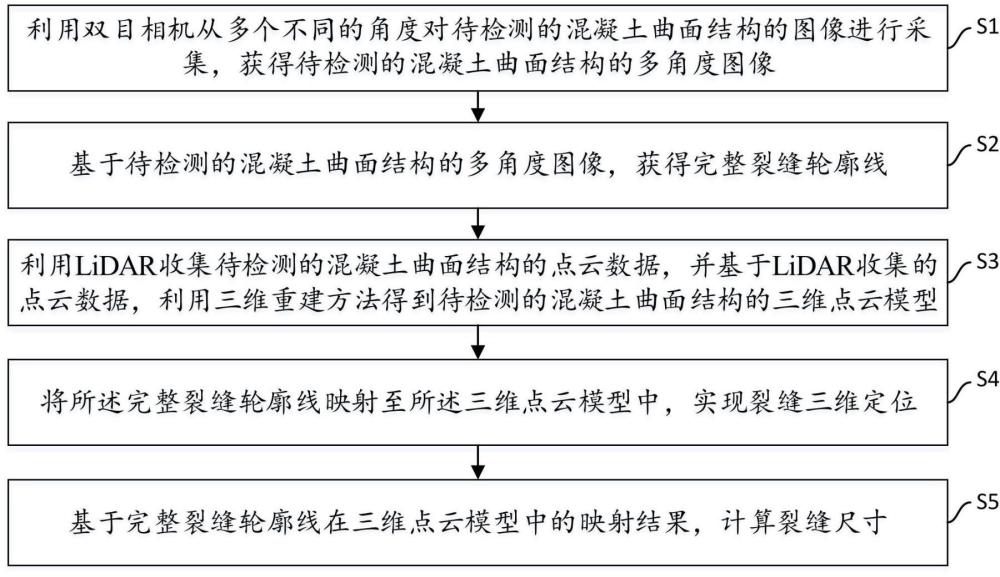
4、利用双目相机从多个不同的角度对待检测的混凝土曲面结构的图像进行采集,获得待检测的混凝土曲面结构的多角度图像;
5、基于待检测的混凝土曲面结构的多角度图像,获得完整裂缝轮廓线;
6、利用lidar收集待检测的混凝土曲面结构的点云数据,并基于lidar收集的点云数据,利用三维重建方法得到待检测的混凝土曲面结构的三维点云模型;
7、将所述完整裂缝轮廓线映射至所述三维点云模型中,实现裂缝的三维定位;
8、基于所述完整裂缝轮廓线在所述三维点云模型中的映射结果,计算裂缝尺寸。
9、进一步地,所述基于待检测的混凝土曲面结构的多角度图像,获得完整裂缝轮廓线,包括:
10、训练裂缝识别模型和语义分割模型;
11、使用训练好的裂缝识别模型对双目相机获取的待检测的混凝土曲面结构的多角度图像进行裂缝识别,检测出其中的含裂缝图像;
12、使用训练好的语义分割模型对裂缝识别模型所检测出的含裂缝图像进行语义分割,提取出每一含裂缝图像中的裂缝轮廓线;
13、对不同图像中的属于同一裂缝的裂缝轮廓线进行拼接,得到完整裂缝轮廓线。
14、进一步地,所述对不同图像中的属于同一裂缝的裂缝轮廓线进行拼接,得到完整裂缝轮廓线,包括:
15、基于双目相机拍摄时的位姿信息,确定包含待拼接裂缝的所有图像;
16、针对包含待拼接裂缝的图像,根据裂缝特征进行特征点搜寻,将不同图像中属于同一裂缝的特征点匹配,形成配对特征点;
17、根据配对特征点来匹配图像重叠区域,进行裂缝拼接。
18、进一步地,将所述完整裂缝轮廓线映射至所述三维点云模型中,实现裂缝的三维定位,包括:
19、基于双目相机的视差信息,利用三角测量方法计算所述完整裂缝轮廓线在三维空间中的位置坐标,并将所述完整裂缝轮廓线在三维空间中的位置坐标与所述三维点云模型的坐标统一至同一坐标系中;
20、在所述坐标系中,将所述三维点云模型中被所述完整裂缝轮廓线包围的点云的属性定义为裂缝,剩余的其它点云的属性定义为背景,实现裂缝的三维定位。
21、进一步地,在将所述三维点云模型中被所述完整裂缝轮廓线包围的点云的属性定义为裂缝,剩余的其它点云的属性定义为背景之后,所述结合双目相机与lidar的混凝土曲面结构裂缝定位与分析方法还包括:
22、将裂缝属性的点云和背景属性的点云采用不同颜色区分,以在所述三维点云模型中实现裂缝的三维定位。
23、进一步地,所述基于双目相机的视差信息,利用三角测量方法计算所述完整裂缝轮廓线在三维空间中的位置坐标,包括:
24、首先利用双目相机的内部参数和三角测量方法,计算裂缝轮廓线在三维空间中的坐标,然后利用双目相机的位姿信息,校核裂缝轮廓线的坐标。
25、进一步地,将所述完整裂缝轮廓线在三维空间中的位置坐标与所述三维点云模型的坐标统一至同一坐标系中,包括:
26、根据拍摄时双目相机与lidar的位置关系,校准由双目相机得到的裂缝轮廓线三维坐标系与点云模型三维坐标系,将所述完整裂缝轮廓线在三维空间中的位置坐标与所述三维点云模型中各点云的坐标统一至同一世界坐标系中。
27、进一步地,基于所述完整裂缝轮廓线在所述三维点云模型中的映射结果,计算裂缝尺寸,包括:
28、从所述三维点云模型中,提取出裂缝属性的点云,基于拉普拉斯约束的收缩算法将同一裂缝的点云拟合形成裂缝骨架线;
29、基于拟合出的裂缝骨架线,对各裂缝的长度和宽度进行计算和分析。
30、再一方面,本发明还提供了一种电子设备,其包括处理器和存储器;其中,存储器中存储有至少一条指令,所述指令由处理器加载并执行,以实现上述方法。
31、又一方面,本发明还提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述指令由处理器加载并执行,以实现上述方法。
32、本发明提供的技术方案带来的有益效果至少包括:
33、本发明考虑到混凝土结构可能为曲面构件的情况,采用双目相机和lidar数据采集设备,结合了双目相机获取的混凝土曲面结构多角度图像和lidar收集的混凝土曲面结构点云数据,通过三角测量技术与采集设备位姿信息实现了图像与点云数据的有效整合,以获取完整的裂缝形态,这一方法充分体现了采集目标的空间特性,不仅能精确定位裂缝,还利用点云数据对裂缝进行了深入的分析和计算,从而实现了混凝土结构裂缝的精准定位和分析。相比于传统的图像分析方法,本发明可提供更完整的裂缝的三维空间信息,从而克服了传统方法在三维信息处理方面的局限性。有效提高了混凝土结构裂缝定位和分析的精确性及效率。
技术特征:1.一种结合双目相机与lidar的混凝土曲面结构裂缝定位与分析方法,其特征在于,所述混凝土曲面结构裂缝定位与分析方法包括:
2.如权利要求1所述的结合双目相机与lidar的混凝土曲面结构裂缝定位与分析方法,其特征在于,所述基于待检测的混凝土曲面结构的多角度图像,获得完整裂缝轮廓线,包括:
3.如权利要求2所述的结合双目相机与lidar的混凝土曲面结构裂缝定位与分析方法,其特征在于,所述对不同图像中的属于同一裂缝的裂缝轮廓线进行拼接,得到完整裂缝轮廓线,包括:
4.如权利要求1所述的结合双目相机与lidar的混凝土曲面结构裂缝定位与分析方法,其特征在于,将所述完整裂缝轮廓线映射至所述三维点云模型中,实现裂缝的三维定位,包括:
5.如权利要求4所述的结合双目相机与lidar的混凝土曲面结构裂缝定位与分析方法,其特征在于,在将所述三维点云模型中被所述完整裂缝轮廓线包围的点云的属性定义为裂缝,剩余的其它点云的属性定义为背景之后,所述结合双目相机与lidar的混凝土曲面结构裂缝定位与分析方法还包括:
6.如权利要求4所述的结合双目相机与lidar的混凝土曲面结构裂缝定位与分析方法,其特征在于,所述基于双目相机的视差信息,利用三角测量方法计算所述完整裂缝轮廓线在三维空间中的位置坐标,包括:
7.如权利要求4所述的结合双目相机与lidar的混凝土曲面结构裂缝定位与分析方法,其特征在于,将所述完整裂缝轮廓线在三维空间中的位置坐标与所述三维点云模型的坐标统一至同一坐标系中,包括:
8.如权利要求5所述的结合双目相机与lidar的混凝土曲面结构裂缝定位与分析方法,其特征在于,基于所述完整裂缝轮廓线在所述三维点云模型中的映射结果,计算裂缝尺寸,包括:
技术总结本发明公开了一种结合双目相机与LiDAR的混凝土曲面结构裂缝定位与分析方法,属于机器视觉技术领域,所述方法包括:利用双目相机获得待检测的混凝土曲面结构的多角度图像;基于待检测的混凝土曲面结构的多角度图像,获得混凝土曲面结构中的完整裂缝轮廓线;利用LiDAR收集待检测的混凝土曲面结构的点云数据,并基于LiDAR收集的点云数据,利用三维重建方法得到待检测的混凝土曲面结构的三维点云模型;将完整裂缝轮廓线映射至三维点云模型中,实现裂缝的三维定位;基于所述完整裂缝轮廓线在所述三维点云模型中的映射结果,计算裂缝尺寸。本发明可提高混凝土结构裂缝定位和分析的精确性及效率。技术研发人员:许镇,范晶晶,王英旺,朱奕安,田源,顾栋炼受保护的技术使用者:北京科技大学技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/332209.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表