柔性六维力传感器的制备方法、系统、手套、设备及介质
- 国知局
- 2024-11-21 11:43:18
本技术涉及传感器,特别涉及一种柔性六维力传感器的制备方法、系统、手套、设备及介质。
背景技术:
1、随着测量技术的快速发展,力传感器在航空航天、机器人技术、精密制造以及生物医疗等多个领域扮演着至关重要的角色。这些应用场景对力传感器提出了更高的要求,如更高的灵敏度、更宽的量程、更好的动态性能以及更高的环境适应性。六维力传感器能够同时测量物体所受的三个正交方向上的力和力矩,成为了现代力学测量领域的重要工具。使用刚性材料制备六维力传感器虽然可以实现六维力感知,但很难适应软界面的各种变形,无法完全适应各种复杂环境和任务需求,尤其是在需要高度灵活性和环境适应性的场合,如可穿戴设备、软体机器人以及远程医疗手术机器人中,传统的六维力传感器显得捉襟见肘。
2、因此,如何实现对六维力的高灵敏度和高精度测量是本领域技术人员目前需要解决的技术问题。
技术实现思路
1、本技术的目的是提供一种柔性六维力传感器的制备方法、系统、手套、设备及介质,能够实现对六维力的高灵敏度和高精度测量。
2、为解决上述技术问题,本技术提供一种柔性六维力传感器的制备方法,包括:
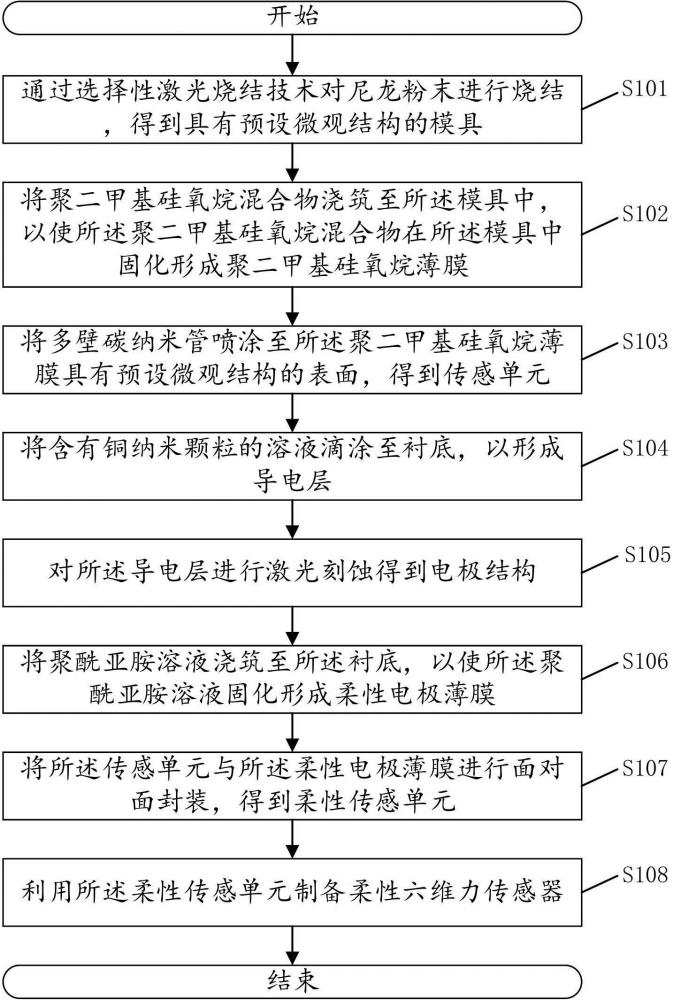
3、通过选择性激光烧结技术对尼龙粉末进行烧结,得到具有预设微观结构的模具;其中,所述预设微观结构为包含多个突出部和凹陷部的微观结构;
4、将聚二甲基硅氧烷混合物浇筑至所述模具中,以使所述聚二甲基硅氧烷混合物在所述模具中固化形成聚二甲基硅氧烷薄膜;其中,所述聚二甲基硅氧烷薄膜具有所述预设微观结构;
5、将多壁碳纳米管喷涂至所述聚二甲基硅氧烷薄膜具有所述预设微观结构的表面,得到传感单元;其中,所述传感单元为具有所述预设微观结构且喷涂了所述多壁碳纳米管的聚二甲基硅氧烷薄膜;
6、将含有铜纳米颗粒的溶液滴涂至衬底,以形成导电层;
7、对所述导电层进行激光刻蚀得到电极结构;
8、将聚酰亚胺溶液浇筑至所述衬底,以使所述聚酰亚胺溶液固化形成柔性电极薄膜;其中,所述柔性电极薄膜的表面嵌入有所述导电层的铜纳米颗粒;
9、将所述传感单元与所述柔性电极薄膜进行面对面封装,得到柔性传感单元;其中,所述传感单元中被喷涂所述多壁碳纳米管的表面与所述柔性电极薄膜中嵌入铜纳米颗粒的表面相接触;
10、利用所述柔性传感单元制备柔性六维力传感器。
11、可选的,利用所述柔性传感单元制备柔性六维力传感器,包括:
12、制备传感器上盖和传感器底座;其中,所述传感器上盖和所述传感器底座为凹凸互锁的榫卯结构,所述传感器底座包括8个第一承载面,相邻的第一承载面具有不同的姿态,所述传感器上盖具有与每一所述第一承载面对应的第二承载面;
13、将8个所述柔性传感单元封装于第一薄膜和第二薄膜之间,形成柔性传感单元阵列;其中,所述柔性传感单元阵列中的8个所述柔性传感单元对称排布且处于同一平面,所述第一薄膜为利用聚酰亚胺制备的薄膜,所述第二薄膜为利用聚二甲基硅氧烷制备的薄膜,所述柔性传感单元中的柔性电极薄膜与所述第一薄膜接触;所述柔性传感单元中的传感单元与所述第二薄膜接触;
14、根据所述传感器底座的形状对所述柔性传感单元阵列进行弯折,并将弯折后的柔性传感单元阵列装配至所述传感器上盖和所述传感器底座之间,得到所述柔性六维力传感器;其中,所述柔性六维力传感器中每一所述柔性传感单元均嵌入至对应的所述第一承载面和所述第二承载面之间。
15、可选的,制备传感器上盖和传感器底座,包括:
16、利用3d打印设备制备上盖模具和底座模具;
17、向所述上盖模具和所述底座模具浇筑聚二甲基硅氧烷混合物并去除气泡,得到所述传感器上盖和所述传感器底座。
18、可选的,在对所述导电层进行激光刻蚀得到电极结构之后,在将聚酰亚胺溶液浇筑至所述衬底之前,还包括:
19、去除所述衬底上含有铜纳米颗粒的溶液。
20、本技术还提供了一种手套,包括:
21、手套本体;
22、设置于所述手套本体的预设位置的柔性六维力传感器;其中,所述柔性六维力传感器为上述柔性六维力传感器的制备方法制备的柔性六维力传感器;
23、通过引线与所述柔性六维力传感器中柔性传感单元连接的信号处理模块;其中,所述信号处理模块用于根据所述柔性传感单元的电阻值计算手套的受力信息和/或力矩信息。
24、可选的,所述信号处理模块包括计算单元、电压检测单元和多个固定电阻;
25、每一所述固定电阻通过所述引线与对应的所述柔性传感单元串联;
26、所述电压检测单元用于检测每一所述固定电阻两端的电压信号;
27、所述计算单元用于根据所有所述电压信号确定所述受力信息和/或所述力矩信息。
28、可选的,所述计算单元根据所有所述电压信号确定所述受力信息和/或所述力矩信息的过程包括:将所述电压信号代入映射矩阵得到所述受力信息和/或所述力矩信息;其中,所述映射矩阵为通过静态标定实验得到的矩阵。
29、本技术还提供了一种柔性六维力传感器的制备系统,包括:
30、激光烧结模块,用于通过选择性激光烧结技术对尼龙粉末进行烧结,得到具有预设微观结构的模具;其中,所述预设微观结构为包含多个突出部和凹陷部的微观结构;
31、第一浇筑模块,用于将聚二甲基硅氧烷混合物浇筑至所述模具中,以使所述聚二甲基硅氧烷混合物在所述模具中固化形成聚二甲基硅氧烷薄膜;其中,所述聚二甲基硅氧烷薄膜具有所述预设微观结构;
32、喷涂模块,用于将多壁碳纳米管喷涂至所述聚二甲基硅氧烷薄膜具有所述预设微观结构的表面,得到传感单元;其中,所述传感单元为具有所述预设微观结构且喷涂了所述多壁碳纳米管的聚二甲基硅氧烷薄膜;
33、电极刻蚀模块,用于将含有铜纳米颗粒的溶液滴涂至衬底,以形成导电层;还用于对所述导电层进行激光刻蚀得到电极结构;
34、第二浇筑模块,用于将聚酰亚胺溶液浇筑至所述衬底,以使所述聚酰亚胺溶液固化形成柔性电极薄膜;其中,所述柔性电极薄膜的表面嵌入有所述导电层的铜纳米颗粒;
35、封装模块,用于将所述传感单元与所述柔性电极薄膜进行面对面封装,得到柔性传感单元;其中,所述传感单元中被喷涂所述多壁碳纳米管的表面与所述柔性电极薄膜中嵌入铜纳米颗粒的表面相接触;
36、制备模块,用于利用所述柔性传感单元制备柔性六维力传感器。
37、本技术还提供了一种存储介质,其上存储有计算机程序,所述计算机程序执行时实现上述柔性六维力传感器的制备方法执行的步骤。
38、本技术还提供了一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器调用所述存储器中的计算机程序时实现上述柔性六维力传感器的制备方法执行的步骤。
39、本技术提供了一种柔性六维力传感器的制备方法,在本方法中通过对尼龙粉末进行烧结得到具有预设微观结构的模具,在将聚二甲基硅氧烷混合物浇筑至模具后形成聚二甲基硅氧烷薄膜。聚二甲基硅氧烷薄膜包含多个突出部和凹陷部的微观结构,这种结构提高了与外界环境的接触面积,使用上述聚二甲基硅氧烷薄膜制备的柔性六维力传感器对外界刺激具有较好的响应能力。本技术还在将多壁碳纳米管喷涂至所述聚二甲基硅氧烷薄膜具有所述预设微观结构的表面,得到传感单元;通过喷涂多壁碳纳米管提高了聚二甲基硅氧烷薄膜的导电性和机械强度,使用上述传感单元制备的柔性六维力传感器能够快速响应外力变化,提高了测量的灵敏度。本技术将铜纳米颗粒溶液滴涂在衬底并进行激光刻蚀形成电极结构,还将聚酰亚胺溶液浇筑至所述衬底得到表面嵌入有所述导电层的铜纳米颗粒的柔性电极薄膜,该柔性电极薄膜能够提供稳定的电学连接。本技术将传感单元与所述柔性电极薄膜进行面对面封装,得到柔性传感单元,并利用所述柔性传感单元制备柔性六维力传感器。可见,通过上述方式制备的柔性六维力传感器能够实现对六维力的高灵敏度和高精度测量。本技术同时还提供了一种手套、一种柔性六维力传感器的制备系统、一种存储介质和一种电子设备,具有上述有益效果,在此不再赘述。
本文地址:https://www.jishuxx.com/zhuanli/20241120/332573.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表