一种全自动活检针及基于电磁定位的活检系统的制作方法
- 国知局
- 2024-11-21 11:51:57
本技术涉及医疗器械,具体而言,涉及一种全自动活检针及基于电磁定位的活检系统。
背景技术:
1、全自动活检针是一种用于获取组织样本进行病理检测的先进医疗设备。与传统的手动活检方式相比,全自动活检针在发射、取样方面实现了自动化,提高了活检的效率和准确性。
2、目前临床活检术时,全自动活检针通常与图像导航技术融合使用,图像导航技术包括x线透视、超声、ct和mr等。术前准备阶段,术者首先使用各类影像学技术(如超声、ct或mri)对患者进行成像,以获取目标病变的详细信息,包括位置、大小、形状等特点,然后基于影像数据制定详细的取样计划,确定活检针的穿刺进针点、插入路径、角度及深度等,在术中时,根据以上信息操作全自动活检针进行取样操作。
3、但是在术中具体实施时,术者只能确定患者体表的穿刺进针点,而活检针进入人体后的具体位置,其与目标取样位置的距离无法准确把握,只能判断其大概位置进行取样,可能会影响取样结果。
技术实现思路
1、本技术的目的在于提供一种全自动活检针,旨在解决相关技术中活检针进入人体后的具体位置,其与目标取样位置的距离无法准确把握,可能会影响取样结果的问题。
2、本技术的额外方面和优点将部分地在下面的描述中阐述,并且部分地将从描述中变得显然,或者可以通过本技术的实践而习得。
3、根据本技术的第一方面,提供一种全自动活检针,包括:
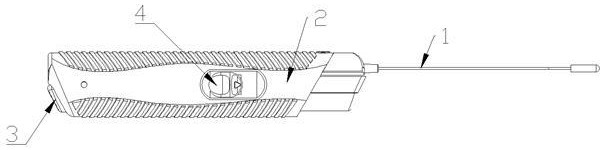
4、壳体、击发组件、触发组件、活检针组件和第一电磁导航传感器;
5、所述击发组件、触发组件、活检针组件和第一电磁导航传感器装配于所述壳体;
6、所述击发组件与所述活检针组件连接,所述击发组件具有带动所述活检针组件向所述壳体的近端方向内缩的蓄能状态和在所述触发组件的触发下带动所述活检针组件向所述壳体的远端方向外伸的击发状态,在所述蓄能状态向所述击发状态切换过程中,所述活检针组件完成活检取样;
7、所述触发组件用于触发所述击发组件以使所述击发组件由所述蓄能状态向所述击发状态切换;
8、所述活检针组件包括套接设置的针芯和针管,所述针芯包括设置于远端的针尖和连接所述针尖的近端并向所述壳体的近端方向延伸的针体,所述针体内部成型中空的传感器装配通道,所述传感器装配通道沿所述针体长度方向延伸;
9、所述第一电磁导航传感器为细长型结构,在所述击发组件处于所述蓄能状态时,所述第一电磁导航传感器伸向至所述传感器装配通道远端的目标位置,在所述击发组件带动所述活检针组件由所述蓄能状态向所述击发状态切换时,所述第一电磁导航传感器固定不动。
10、在本技术的一种示例性实施例中,所述壳体近端开设有连接通孔,所述连接通孔与所述传感器装配通道连通,所述连接通孔上用于安装第一连接件,所述第一电磁导航传感器的远端端部穿过所述第一连接件伸入至所述传感器装配通道的所述目标位置,所述第一电磁导航传感器的近端端部适于连接至导航设备,所述第一电磁导航传感器与所述第一连接件相对固定设置。
11、在本技术的一种示例性实施例中,所述第一连接件与所述连接通孔的所述连接设置为所述第一连接件在外力扭矩下能够相对所述连接通孔转动。
12、在本技术的一种示例性实施例中,所述第一连接件的远端端部设置有连接帽,所述连接帽插接于所述连接通孔,所述连接帽的侧壁上设有环形凸起或环形槽,所述连接通孔的内壁上设有环形槽或环形凸起,所述连接帽通过所述环形凸起与所述环形槽的配合与所述连接通孔可转动连接。
13、在本技术的一种示例性实施例中,所述第一电磁导航传感器的近端套设有第二连接件,所述第一电磁导航传感器的远端从所述第二连接件的远端穿出,所述第一电磁导航传感器与所述第二连接件固定设置,所述第二连接件的远端端部与所述第一连接件的近端端部可拆卸连接;所述第二连接件的远端端部与所述第一连接件的近端端部连接到位时,所述第一电磁导航传感器的远端端部伸入所述传感器装配通道的所述目标位置。
14、在本技术的一种示例性实施例中,所述第一连接件为第一连接管,所述第二连接件为第二连接管。
15、在本技术的一种示例性实施例中,在所述壳体近端的内部设置有固定保护管,所述固定保护管、所述连接通孔以及所述传感器装配通道三者的中心对齐,所述第一电磁导航传感器穿过所述连接通孔和所述固定保护管伸入到所述传感器装配通道内。
16、在本技术的一种示例性实施例中,所述针芯的近端伸入所述固定保护管内部,所述针芯伸入所述固定保护管的长度设置为在所述针芯随所述击发组件击发时不会从所述固定保护管的远端端口脱出,在所述针芯随所述击发组件切换至所述蓄能状态时不会从所述固定保护管的近端端口伸出。
17、在本技术的一种示例性实施例中,所述目标位置为所述传感器装配通道远端的端部。
18、在本技术的一种示例性实施例中,所述针尖和所述针体分体设置,所述针尖的近端和所述针体的远端通过粘接或焊接连接。
19、在本技术的一种示例性实施例中,所述击发组件包括近端设置的第一子击发组件和远端设置的第二子击发组件,所述壳体内具有近端设置的第一腔体和远端设置的第二腔体,所述第一子击发组件安装在所述第一腔体内,所述第二子击发组件安装在所述第二腔体内,所述针芯连接在所述第一子击发组件上,所述针管连接在所述第二子击发组件上,所述第一子击发组件受所述触发组件的触发由所述蓄能状态向所述击发状态切换,同时带动所述针芯向远端方向弹出,所述第一子击发组件切换至所述击发状态时触发所述第二子击发组件由所述蓄能状态向所述击发状态切换,同时带动所述针管向远端方向弹出。
20、在本技术的一种示例性实施例中,所述第一子击发组件包括第一滑块和第一弹性件,所述第二子击发组件包括第二滑块和第二弹性件;
21、所述针芯固接在所述第一滑块上,所述第一滑块滑动安装在所述第一腔体内,所述第一滑块在所述第一腔体内具有压缩所述第一弹性件以使所述针芯收缩的蓄能状态,所述第一滑块在所述第一腔体内还具有带动所述针芯弹出的击发状态;
22、所述针管固接在所述第二滑块上,所述第二滑块滑动安装在所述第二腔体内,所述第二滑块在所述第二腔体内具有压缩所述第二弹性件以使所述针管收缩的蓄能状态,所述第二滑块在所述第二腔体内还具有带动所述针管弹出的击发状态。
23、在本技术的一种示例性实施例中,所述触发组件包括触发键和触发连杆,所述触发键与所述触发连杆连接,且所述触发键与所述触发连杆均滑动安装在所述壳体内,所述触发键与所述触发连杆滑动过程中在所述初始位置与触发位置之间进行切换;
24、所述触发连杆滑动至所述触发位置时用于将所述第一弹性件推出所述第一卡槽,以使所述第一滑块从所述蓄能状态切换至击发状态。
25、在本技术的一种示例性实施例中,所述触发键包括侧触发键和后触发键,所述侧触发键和后触发键均固定连接在所述触发连杆上,所述侧触发键设置在所述壳体的侧面,所述后触发键设置在所述壳体的近端。
26、本技术第二方面提供一种基于电磁定位的活检系统,包括上述第一方面任一项所述的全自动活检针、第二电磁导航传感器和导航设备;
27、所述第二电磁导航传感器与超声探头固定连接;
28、所述导航设备设置为能够提取所述第一电磁导航传感器和第二电磁导航传感器接收的电磁信号,并给予所述电磁信号确定所述全自动活检针和所述超声探头的空间位置关系。
29、本技术示例性实施例可以具有以下部分或全部有益效果:
30、在本技术示例实施方式所提供的全自动活检针,包括壳体、击发组件、触发组件、活检针组件、第一电磁导航传感器,壳体形成供术者握住并进行操作的手柄,击发组件、触发组件、活检针组件和第一电磁导航传感器均装配在壳体形成的手柄内,其中,击发组件与活检针组件连接,击发组件具有带动活检针组件向壳体的近端方向内缩的蓄能状态,击发组件还具有在触发组件的触发下带动活检针组件向壳体的远端方向外伸的击发状态,击发组件带动活检针组件在蓄能状态向击发状态切换过程中,活检针组件完成活检取样;活检针组件包括套接设置的针芯和针管,针芯包括设置于远端的针尖和连接针尖的近端并向壳体的近端方向延伸的针体,针体内部成型中空的传感器装配通道,传感器装配通道沿针体长度方向延伸;第一电磁导航传感器为细长型结构,在击发组件处于蓄能状态时,第一电磁导航传感器伸向至传感器装配通道远端的目标位置,在击发组件带动活检针组件由蓄能状态向击发状态切换时,第一电磁导航传感器固定不动。
31、一方面,通过触发组件、击发组件及活检针组件的配合,实现全自动活检针的自动发射、取样,相比手动活检针发射、取样提高了效率和准确性;
32、另一方面,全自动活检针与第一电磁导航传感器相结合,通过在活检针组件的针芯的内部成型中空的传感器装配通道,使得在活检术时,能够将细长型的第一电磁导航传感器从针体的近端开口处伸入至针体的远端目标位置,这样当活检针插入人体体内时,术者可以利用导航设备识别第一电磁导航传感器在人体内的空间位置(位置和姿态),进而再利用第一电磁导航传感器与活检针组件中针尖以及取样槽的尺寸关系准确计算出针尖和取样槽在人体内的空间位置(位置和姿态),从而能够确定活检针组件的针尖及取样槽与目标取样位置的位置关系;
33、再一方面,由于针芯在击发时有一定的击发距离,如果将第一电磁导航传感器固定在针芯内部并在击发时随着针芯一起向远端方向弹出,那么在生产时需要在针芯内部设计用于固定第一电磁导航传感器的固定结构,这在狭窄的传感器装配通道内难以实现。此外,当活检针需要二次取样或多次取样时,针芯需要随着击发组件回到蓄能状态,若第一电磁导航传感器固定在针芯内部则会随着针芯向近端方向内缩,细长型的第一电磁导航传感器在传感器装配通道内会出现挤压或弯曲,容易造成对第一电磁导航传感器的伤害,不利于第一电磁导航传感器的使用寿命,而且如果固定结构固定不牢固的话,还会造成第一电磁导航传感器与针芯相对位置改变的情况,导致二次(或多次)取样时导航设备对针尖及取样槽的空间位置定位不准确,从而造成二次(或多次)取样失败。因此,为了方便针芯的生产和第一电磁导航传感器的装配,以及避免在使用时第一电磁导航传感器与针芯的相对位置改变而造成二次(或多次)取样失败,在本技术示例实施方式所提供的全自动活检针中,第一电磁导航传感器在装配至针体的传感器装配通道时,两者没有固定关系,传感器装配通道内部也无需设计用于固定第一电磁导航传感器的固定结构,在具体使用时,先将活检针组件调整为蓄能状态,再将第一电磁导航传感器沿着针体的传感器装配通道伸向至传感器装配通道的远端的目标位置,完成第一电磁导航传感器的装配后,最后将处于蓄能状态的活检针组件插入至人体内进行击发取样,通过第一电磁导航传感器确定活检针组件中针尖(及其取样槽)的空间位置(位置和姿态),当击发组件带动活检针组件由蓄能状态向击发状态切换时,第一电磁导航传感器固定不动,击发后的针尖(及其取样槽)的具体空间位置可以由第一电磁导航传感器的空间位置以及传感器装配通道的目标位置与针尖(及其取样槽)的尺寸关系计算获得。通过该设置不仅能够实现在术中对针尖(及其取样槽)的空间位置的定位,而且结构简单、方便生产且第一电磁导航传感器不容易出现损坏。
34、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
本文地址:https://www.jishuxx.com/zhuanli/20241120/333083.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。