柔性线材输送装置及包括该装置的柔性线材输送系统的制作方法
- 国知局
- 2024-11-21 11:48:24
本发明涉及用于输送柔性线材的柔性线材输送装置,还涉及包括该装置的柔性线材输送系统。该柔性线材输送装置和系统用于输送柔性线材,例如可用于输送内窥镜软镜管之类的医疗领域,或者可用于输送其他领域中的柔性线材。
背景技术:
1、柔性线材的输送在许多行业和应用场景中起到重要作用,例如,电缆线的输送,光纤线的输送,机器人线缆的输送等等。在医疗设备中也有很多柔性线材输送的应用场景,例如,心血管导丝作为一种非常细长且柔韧的金属或复合材料线材,在心血管介入治疗中起到导引作用,通过输送心血管导丝帮助医生在患者的血管系统内引导其他器械(如导管、支架等)到达目标病灶位置。
2、柔性线材的输送在柔性内窥镜领域也有应用。内窥镜可经由人体的天然孔道、手术形成的小切口等进入人体内,医生可通过内窥镜看到人体内部腔体中的情况,以用于检查人体内情况、帮助医生进行手术等等。柔性内窥镜的插入管是柔性的(或者说是软的),其可通过人体内弯曲的通路而到达目标位置。传统的内窥镜插入管是由医生手动插入人体自然腔道中,在将内窥镜插入管向前推入人体内的同时,医生还可旋转内窥镜软管,从而使得内窥镜能够通过曲折的通路并到达所需的位置。
3、为了方便医生在远端控制内窥镜插入管的插入,内窥镜输送机器人开始在内窥镜手术中普及。现有的内窥镜机器人主要是由机器人臂在一端保持住内窥镜插入管,然后通过机器人臂前后移动,将内窥镜插入管输送到人体中。
4、对于现有的内窥镜输送机器人在使用过程中表现出一些问题。例如,现有的内窥镜输送机器人主要采用的是间歇式输送的形式,在输送过程中,容易发生内窥镜插入管过度弯曲变形的现象,而这种过度弯曲变形会对插入造成阻碍,甚至会导致内窥镜插入的失败。
5、针对这一现象,现有技术中提出了可连续输送内窥镜插入管的机构插入管,包括多组辊子对,内窥镜插入管被压紧在辊子对之间,通过辊子的转动带动内窥镜插入管连续前进。在操作过程中,需要预先将内窥镜插入管夹在辊子对之间,并确保辊子能够始终对内窥镜插入管施加按压力,以保证对内窥镜插入管的连续输送。这对使用该内窥镜插入管输送机构的医护人员提出了较高的操作要求。
6、因此,在本领域中,存在对一种结构经过改进的柔性线材输送装置及其系统的需求,其能够用于输送内窥镜插入管,并且确保对其连续输送。此外,还希望该柔性线材输送能够容易地安装和操作。
技术实现思路
1、本发明是为了解决以上所述现有技术中存在的问题而作出的。本发明的目的是提供一种新颖的柔性线材输送装置及其系统,其能够用于输送诸如内窥镜插入管之类的柔性线材,可保证连续输送该柔性线材。进一步地,该柔性线材输送装置还能够容易地安装,便于操作。
2、本技术提出了一种柔性线材输送装置。该柔性线材装置包括输送机构。其中输送机构包括:夹持输送部件,夹持输送部件中设置有供柔性线材通过的线材通路;以及压缩限位部件,压缩限位部件包括按压部件,按压部件从线材通路的一侧按压夹持输送部件的一部分,从而在夹持输送部件与柔性线材之间产生摩擦配合,随着夹持输送部件的运动,在摩擦配合的作用下沿直线输送柔性线材。可选地,柔性线材装置还可包括壳体,用于容纳输送机构,换言之,壳体可对输送机构起到保护作用。
3、该结构的柔性线材输送装置通过按压部件对夹持输送部件的按压,可实现对诸如内窥镜插入管之类的柔性线材的连续按压,确保夹持输送部件和柔性线材之间的摩擦力,这样,通过夹持输送部件的诸如旋转之类的运动,能够以简单的结构实现对柔性线材的连续直线输送。而且,该柔性线材输送装置能够容易地安装,且操作方便。
4、夹持输送部件的一种可选结构包括第一输送构件和第二输送构件,第一输送构件和第二输送构件之间存在间隙,间隙形成线材通路的至少一部分,柔性线材容纳在间隙中,并且按压部件按压在第一输送构件和第二输送构件中的一个上。
5、在一种可选的实施方式中,第一输送构件为第一夹盘,第二输送构件为第二夹盘,第一夹盘和第二夹盘互相固定连接在一起,使得在第一夹盘和第二夹盘之间形成间隙。
6、柔性线材可被夹持在第一夹盘和第二夹盘之间,随着第一夹盘和第二夹盘的旋转,柔性线材被连续地直线输送。
7、可选地,第一夹盘包括毂部和从毂部径向向外延伸的多个指状件,在安装好的状态下,按压部件在第一夹盘的背向第二夹盘的一侧上按压在指状件中的至少一个上,使得被按压的指状件朝向第二夹盘变形。变形的指状件与第二夹盘之间的间隙尺寸减小,使得其中的柔性线材被挤压,确保作用在柔性线材上的摩擦力,由此实现对柔性线材的输送。
8、为了增加夹持输送部件作用在柔性线材上的摩擦力,夹持输送部件上较佳地还设置有第一摩擦增强件和第二摩擦增强件中的至少一个,其中第一摩擦增强件设置在第一夹盘的面向第二夹盘的一侧的表面上第二摩擦增强件设置在第二夹盘的面向第一夹盘的一侧的表面上;其中,第一摩擦增强件和第二摩擦增强件中的至少一个具有如下特征中的至少一种:由硅胶材料制成,以及形成有纹理部和凹凸部中的至少一种。
9、在可选的结构中,壳体的顶部形成有开口,开口的在柔性线材的行进方向上相对布置的两个侧边上形成有缺口部,在安装好的状态下,缺口部与间隙对准,这样,柔性线材能够经由缺口部进入和离开线材通路。
10、进一步地,压缩限位部件安装在壳体上,且关闭开口,当压缩限位部件安装到壳体上以关闭开口时,按压部件按压在第一夹盘的指状件的背向第二夹盘的一侧上。通过这样的压缩限位部件的设置,可方便将柔性线材定位到第一夹盘和第二夹盘之间,且随后可容易地实现对定位好的柔性线材施加压缩力。具体来说,在定位柔性线材时,压缩限位部件未安装到壳体上,壳体的开口敞开,且第一夹盘的指状件未受压,第一夹盘和第二夹盘之间的间隙较大,容易将柔性线材放到该间隙中,而当将压缩限位部件安装到壳体上之后,其按压部件与第一夹盘的指状件接触,按压指状件以使其变形,从而被按压的指状件对应部位的间隙尺寸减小,从而柔性线材被压缩。
11、在一种具体实施结构中,按压部件呈压板的形式,且按压部件被制成为两侧的厚度小于中间部分的厚度。这样,在指状件随着夹持输送部件的转动而进入到与按压部件相接触以受压的过程中,可逐渐地对指状件施加压力,从而能够顺利地将指状件引导到受压变形位置。
12、可选地,在按压部件的两侧和中间部分之间形成有斜面或弧面。斜面或弧面的形状能够更顺滑地将指状件引导到受按压部件压缩的位置。
13、可选地,压缩限位部件和壳体通过卡扣结构连接在一起。
14、在另一种具体实施结构中,夹持输送部件包括:沿着柔性线材的前进方向布置的第一传动轮和第二传动轮;以及围绕第一传动轮和第二传动轮设置的柔性带;其中,柔性带包括沿着与柔性线材的前进方向垂直的方向相对地设置的第一带部分和第二带部分,其中第一带部分形成第一输送构件,第二带部分形成第二输送构件,在第一带部分和第二带部分之间形成间隙。
15、可选地,在第一带部分上形成有多个指状件,按压部件在第一带部分的与第二带部分相背的一侧上按压多个指状件中的一部分,使得对应的指状件朝向第二带部分变形。
16、其中,柔性带形成为以下形状中的一种:圆形、椭圆形、三角形、四边形。除此之外,根据需要,柔性带还可形成为其他可实现的形状。
17、在更具体的实施结构中,夹持输送部件包括转动机构和多个辊子,辊子安装在压缩限位部件上,转动机构与多个辊子相对地设置,以将柔性线材夹持在转动机构和辊子之间。
18、进一步地,转动机构的结构可以是以下结构中的一种:
19、转动机构包括:沿着柔性线材的前进方向布置的第一传动轮和第二传动轮;以及围绕第一传动轮和第二传动轮设置的柔性带,在柔性带上形成有多个柔性齿;或者
20、转动机构包括转动轮,在转动轮的外表面上形成有多个柔性齿。
21、而对于压缩限位部件,其结构可以是以下结构中的一种:
22、压缩限位部件包括固定板,多个辊子安装在固定板上;或者
23、压缩限位部件包括固定板和压板,多个辊子安装在压板上,其中,在压板和固定板之间设置有偏置机构,偏置机构将压板朝着转动机构偏置。
24、可选地,柔性线材输送装置还包括第一传感器和第二传感器中的至少一个,其中,第一传感器用于感测柔性线材在输送机构中是否打滑,第二传感器用于感测施加在柔性线材上的压力。第一传感器例如可以是光学传感器、霍尔传感器等,其通过检测柔性线材的运动情况来判断柔性线材是否打滑。第二传感器例如是压力传感器。借助于第一和第二传感器,操作人员可以直到柔性线材是否被正常地沿直线输送。
25、可选地,按压部件能够由电机驱动,以改变施加在夹持输送部件上的压力。
26、可选地,线材通路的宽度是可变的。例如,可通过改变上述第一输送构件和第二输送构件之间的间距,改变柔性带的第一带部分和第二带部分之间的间距,等等。由此可以适用于不同粗细的柔性线材。
27、本发明还涉及一种柔性线材输送系统,该柔性线材输送系统包括如上所述的柔性线材输送装置。
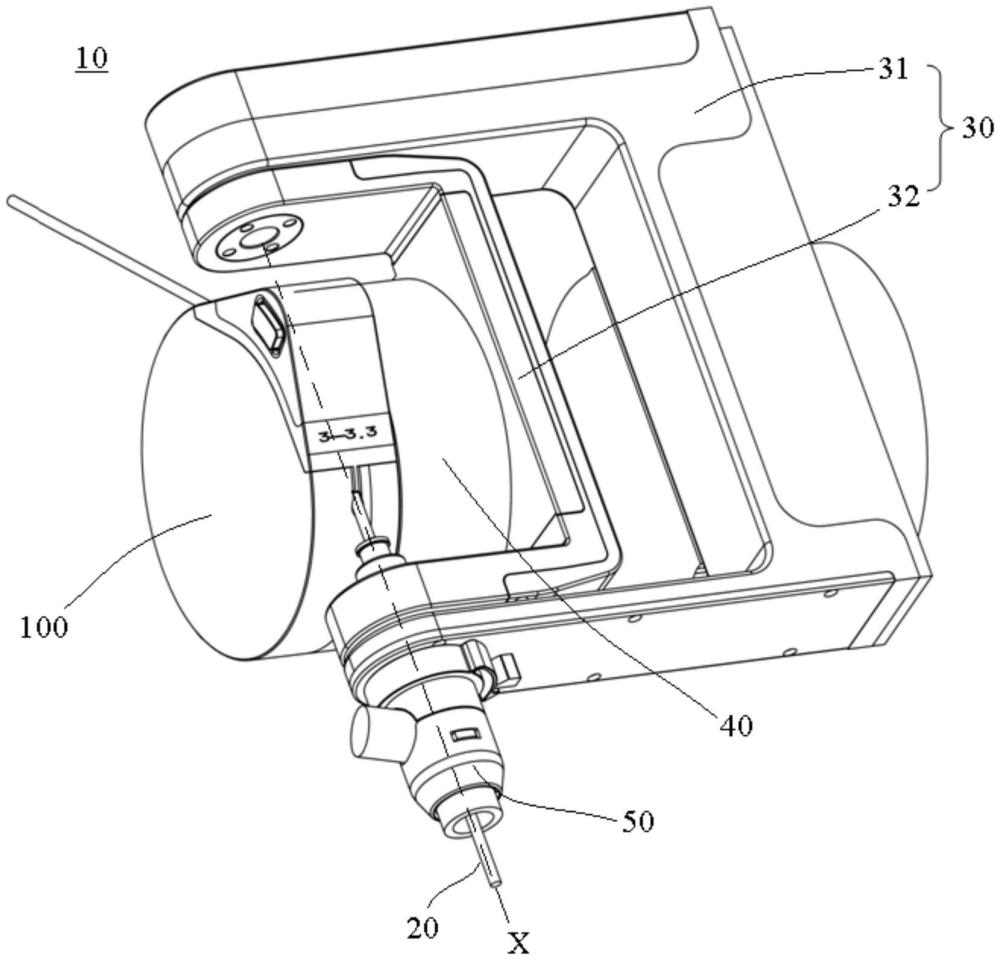
28、进一步地,柔性线材输送装置还包括旋转架,柔性线材输送装置安装在该旋转架上,且旋转架设置成能够围绕柔性线材的纵轴线旋转,从而带动柔性线材输送装置围绕柔性线材的纵轴线旋转。
29、在一种具体结构中,旋转架包括:
30、旋转外架组件;以及
31、旋转内架组件,旋转内架组件可绕纵轴线旋转地连接在旋转外架组件的内侧,并且在旋转内架组件上固定安装有输送装置安装座,柔性线材输送装置固定连接在输送装置安装座上。
本文地址:https://www.jishuxx.com/zhuanli/20241120/332793.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表