一种基于投影的无参考点云质量评价算法
- 国知局
- 2024-11-21 11:58:28
本发明属于人工智能,可应用于失真点云的质量评价场景,具体是一种基于投影的无参考点云质量评价算法。
背景技术:
1、点云质量评价技术在虚拟现实、增强现实、自动驾驶、医学影像等领域应用广泛。由于实际应用场景和特定传感器的限制,点云数据在采集、处理和传输过程中都容易受到各种因素的干扰,如下采样、高斯滤波、压缩等,从而导致点云质量下降,进一步影响人眼的感知,由此需要客观的点云质量评价模型来评价点云是否符合应用需求。
2、目前通常采用的点云质量评价算法为基于三维点的质量评价算法和基于二维投影的评价算法。基于三维点的评价方算法主要是通过比较三维区域中的对应点或者对应区域的相似性来进行质量评价,即从每个点云中以全局或者局部方式提取一些几何或特征,由此进行点云质量评价,由于这种方式仅考量了点云的几何信息,忽略语义信息从而导致点云质量评价结果的准确性较低。基于二维投影的评价算法主要是通过将三维点云投影到二维平面上,利用相较成熟的二维图像质量评价的方法进行质量评价。这些方法主要通过手工提取点云投影图像的单一尺度特征,评价性能并不理想。因此需要设计一种更加符合人类感知的,预测性能更精确的点云质量评价算法。
技术实现思路
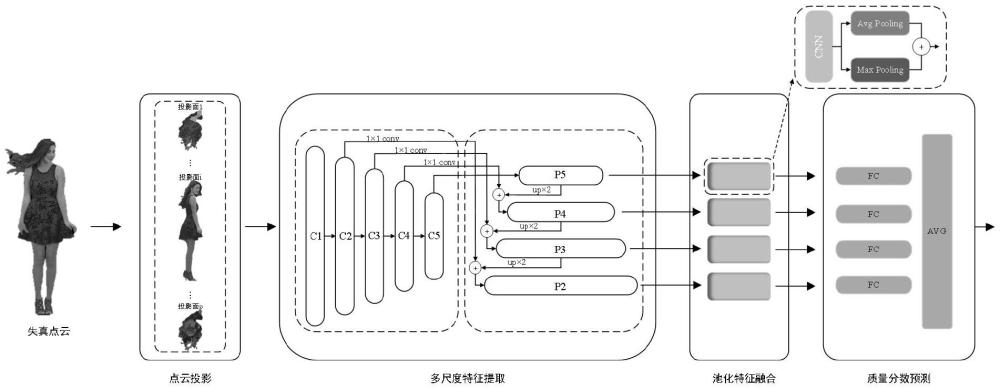
1、针对现有技术的不足,本发明提出了一种基于投影的无参考点云质量评价算法,本发明首先将点云数据投影到二维平面上,然后提取点云投影图的不同尺度特征,并将不同尺度特征经过组合池化处理后进行特征融合,最后采用全连接层对融合后的特征进行回归,并将所有尺度特征回归后的平均预测分数作为得到的点云质量的客观评分。
2、考虑到人类视觉系统对不同尺度图像的感知质量不同,本发明首先将失真点云进行六个视角的投影处理,并将投影图堆叠成图像块作为输入,基于特征金字塔框架的多尺度特征融合理念,在特征提取部分,将视觉几何组网络(visual geometry group network,vgg)或残差网络(residual network,resnet)作为特征金字塔的骨干提取图像多尺度特征,并将每个尺度特征都经过两种池化处理,将相同尺度下处理后的特征进行融合,将融合后的特征采用全连接层进行回归,最终将所有层预测值的均值作为点云质量的客观评分。
3、本发明通过多视角投影和多尺度特征融合,更好地模拟人类视觉系统的感知能力,提高了对点云质量的评价准确性。相较于传统方法,本发明能够更全面地捕捉点云失真的不同表现形式,提供更加客观和可靠的质量评价结果。
技术特征:1.一种基于投影的无参考点云质量评价算法,其特征在于,包括:
2.根据权利要求1所述的点云质量评价算法,其特征在于,
3.根据权利要求1或2所述的点云质量评价算法,其特征在于,
4.根据权利要求1或2所述的点云质量评价算法,其特征在于,
5.根据权利要求1或2所述的点云质量评价算法,其特征在于,
6.根据权利要求1或2所述的点云质量评价算法,其特征在于,
技术总结本发明提出了一种基于投影的无参考点云质量评价算法。首先将点云沿着三个正交投影(上,下,左,右,前和后)投影到六个2D图像平面上,然后将六个投影图堆叠成图像块送入到特征提取单元;在特征提取阶段,利用特征金字塔网络提取点云的多尺度特征,并通过池化操作对提取的特征进行降维并融合。最后将每层融合后的特征通过质量回归单元进行回归得到每层的点云预测分数,并将所有层预测分数的进行平均,得到点云质量的最终客观分数。技术研发人员:肖淑艳,苗义壮,潘玲佼,崔洁,陶为戈,吴全玉,杨正开受保护的技术使用者:江苏理工学院技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/333649.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。