一种海上风电机组模型重构方法、装置、介质及产品
- 国知局
- 2024-11-21 12:01:03
本技术涉及模型重构,特别是涉及一种海上风电机组模型重构方法、装置、介质及产品。
背景技术:
1、近年来,风力发电领域飞速发展,在技术革新以及装机量等方面均取得了巨大的成就,并在全球范围内引起高度关注。陆上优质风力发电资源接近饱和,深海机位、大容量机组的海上风力发电成为当前发展的新趋势。相较于陆上风力发电,海上风力发电不受视觉干扰、噪音影响等方面的限制,且海上环境平均风速大、湍流小、有效风时长大幅增加。
2、海上大容量风电机组在高叶尖速比阶段,即定速、变桨阶段,进行功率跟踪需要同时协调控制桨距角与电磁转矩,以达到稳定转速、跟踪功率指令的复合控制目标。但由于,风电机组非线性项多,各部件间耦合性强,因此需要设计高级的协调控制算法,以提高在高速比阶段风电机组的功率跟踪性能。因此,便需要设计运算速度快、能够准确模拟风电机组运行状态的线性模型,用来设计先进控制器。
3、目前,针对大容量海上风电机组,存在大量研究。然而,大部分模型复杂度高,多作为用于分析大容量海上风电机组的耦合关系、动态响应、疲劳损伤、部件载荷的工具,而不适用于部署高级控制算法;还有部分低阶模型,通过简单机理建模,将大容量海上风电机组看作全钢性模型,其不能够精准地跟踪大容量海上风电机组lowt在复杂、极端工况下的动态响应,基于该模型发展的控制算法不能够很好的应用于非常规工况。此外,现有的线性化气动转矩模型主要简化为ta=a1β+a2ωr+a3v,ta为气动转矩,a1、a2和a3均为系数,β为桨距角,ωr为转子转速,v为入流风速,其一般不能反映风机在高叶尖速比阶段转矩随转速上升,气动转矩下降的趋势。
技术实现思路
1、本技术的目的是提供一种海上风电机组模型重构方法、装置、介质及产品,构建高仿真精度与高仿真速度的面向控制的海上风电机组模型,可准确跟踪在不同风速工况下海上大容量风电机组的输出有功功率,解决了现有线性模型无法准确跟踪海上大容量风电机组在低风速、高叶尖速比工况下跟踪不准确的问题。
2、为实现上述目的,本技术提供了如下方案:
3、第一方面,本技术提供了一种海上风电机组模型重构方法,包括:
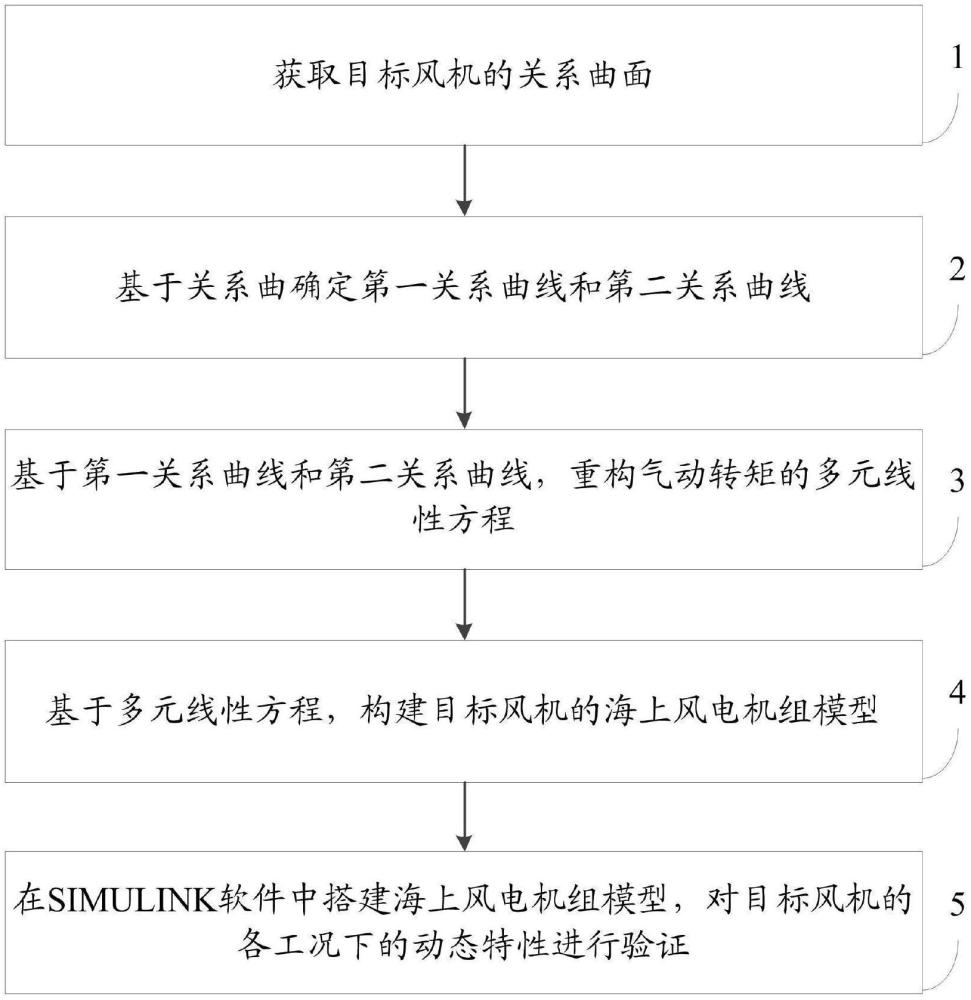
4、获取目标风机的关系曲面;所述目标风机为待重构海上风电机组,所述关系曲面为关于气动扭矩利用系数、叶尖速比和桨距角的曲面;
5、基于所述关系曲确定第一关系曲线和第二关系曲线;所述第一关系曲线为关于气动扭矩利用系数和叶尖速比的曲线,所述第二关系曲线为关于气动扭矩利用系数和桨距角的曲线;
6、基于所述第一关系曲线和所述第二关系曲线,重构气动转矩的多元线性方程;所述多元线性方程是关于气动转矩系数、桨距角、转子转速和入流风速的方程;
7、基于所述多元线性方程,构建所述目标风机的海上风电机组模型;所述海上风电机组模型包括:变桨执行器模型、电磁转矩执行器模型、传动链的扭转角模型、低速轴转速模型、高速轴转速模型和输出有功功率模型;
8、在simulink软件中搭建所述海上风电机组模型,对所述目标风机的各工况下的动态特性进行验证。
9、可选地,获取目标风机的关系曲面,包括:
10、获取所述目标风机的实际运行结果;
11、利用fast软件,基于所述实际运行结果,在设定桨距角范围内,确定所述关系曲面。
12、可选地,所述多元线性方程,包括:
13、ta=b1β+b2ωr+b3v+b4;
14、
15、其中,ta为气动转矩;b1为各工况下的气动转矩对β的偏导数的平均值;β为桨距角;b2为各工况下的气动转矩对ωr的偏导数的平均值;ωr为转子转速;b3为各工况下的气动转矩对v的偏导数的平均值;v为入流风速;b4为气动转矩的修正系数;为中间参数;为偏导数的平均值;为入流风速的中位数;为目标风机的最大气动转矩;为能够捕获最大气动转矩的转速;ρa为空气密度;ar为扇叶扫风面积;r为扇叶长度。
16、可选地,各入流风速的多尾流计算公式,包括:
17、
18、其中,vy为风机考虑所有尾流效应的入流风速;v0为环境风速;vi为第i个上游风机在下游风机处产生的尾流;n为上游风机的数量。
19、可选地,所述变桨执行器模型,包括:
20、
21、其中,为桨距角的二阶导数;ωn为变桨执行器的固有频率;βref为参考桨距角;ξ为变桨执行器的阻尼比;为桨距角的一阶导数;
22、所述电磁转矩执行器模型,包括:
23、
24、其中,为tgn的一阶导数;为参考电磁转矩;tgn为电磁转矩;τgn为电磁转矩执行器的时间常数;
25、所述传动链的扭转角模型,包括:
26、
27、其中,为传动链的扭转角的一阶导数;ωgn为发电机转速;ngn为齿轮箱的增速比;
28、所述低速轴转速模型,包括:
29、
30、其中,为转子转速的一阶导数;jr为低速轴转动惯量;br为传动链阻尼系数;kr为传动链刚度系数;δθ为传动链的扭转角;
31、所述高速轴转速模型,包括:
32、
33、其中,为ωgn的一阶导数;jgn为高速轴转动惯量;
34、所述输出有功功率模型,包括:
35、pgn=ηgn tgnωgn;
36、其中,pgn为输出有功功率;ηgn为发电机效率系数。
37、第二方面,本技术提供了一种计算机装置,包括:存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序以实现上述任一项所述的海上风电机组模型重构方法。
38、第三方面,本技术提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述任一项所述的海上风电机组模型重构方法。
39、第四方面,本技术提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述任一项所述的海上风电机组模型重构方法。
40、根据本技术提供的具体实施例,本技术公开了以下技术效果:
41、本技术公开了一种海上风电机组模型重构方法、装置、介质及产品,首先,获取目标风机的关系曲面;目标风机为待重构海上风电机组,关系曲面为关于气动扭矩利用系数、叶尖速比和桨距角的曲面;基于关系曲确定第一关系曲线和第二关系曲线;第一关系曲线为关于气动扭矩利用系数和叶尖速比的曲线,第二关系曲线为关于气动扭矩利用系数和桨距角的曲线;其次,基于第一关系曲线和第二关系曲线,重构气动转矩的多元线性方程;多元线性方程是关于气动转矩系数、桨距角、转子转速和入流风速的方程;再次,基于多元线性方程,构建目标风机的海上风电机组模型;海上风电机组模型包括:变桨执行器模型、电磁转矩执行器模型、传动链的扭转角模型、低速轴转速模型、高速轴转速模型和输出有功功率模型;最后,在simulink软件中搭建海上风电机组模型,对目标风机的各工况下的动态特性进行验证。本技术通过构建高仿真精度与高仿真速度的面向控制的海上风电机组模型,可准确跟踪在不同风速工况下海上大容量风电机组的输出有功功率,解决了现有线性模型无法准确跟踪海上大容量风电机组在低风速、高叶尖速比工况下跟踪不准确的问题;通过机理-数据复合驱动,将高度非线性的海上大容量风电机组重构为线性状态空间模型,并将其应用于先进控制逻辑中进行验证。海上风电机组模型具有运行速度快、算力依赖小、准确度高、可迁移性强的优点。
本文地址:https://www.jishuxx.com/zhuanli/20241120/333866.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。