一种海上风电系统陆上换流站的控制方法及装置与流程
- 国知局
- 2024-11-21 12:03:31
本技术涉及电网系统优化控制领域,尤其涉及一种海上风电系统陆上换流站的控制方法及装置。
背景技术:
1、在海上风电场中,海上换流站和陆上换流站等设备均为电力电子器件,具备惯性低、鲁棒性较差等缺点。由于这些设备的固有特性,系统的惯性支撑主要依赖于海上风机转子动能和系统输电过程中直流电容设备。然而,海上风机转子所能为系统提供的动能有限,难以满足系统稳定运行的需求。因此,主要依靠直流电容为系统提供惯性能量支撑。
2、但是,单纯依靠直流电容提供的惯性支撑仍然不足以保证系统的稳定性。为了增强系统的动态响应能力和稳定性,需要在直流电容所连接的陆上换流站的控制系统中引入额外的虚拟惯量辅助控制。通过虚拟惯量辅助控制,可以有效地模拟传统同步发电机的惯量效应,提高系统的惯性支撑能力,确保电力系统在受到扰动时能够快速恢复稳定。
3、因此,如何动态调整陆上换流站的输出功率,以使得陆上换流站为海上风电系统提供合适的虚拟惯量支撑,从而提升系统的鲁棒性和抗扰动能力,是当前需要解决的技术问题。
技术实现思路
1、本技术提供了一种海上风电系统陆上换流站的控制方法及装置,以解决如何控制陆上换流站为海上风电系统提供合适的虚拟惯量支撑,从而提升系统鲁棒性和抗扰动能力的技术问题。
2、为了解决上述技术问题,第一方面,本技术实施例提供了一种海上风电系统陆上换流站的控制方法,包括:
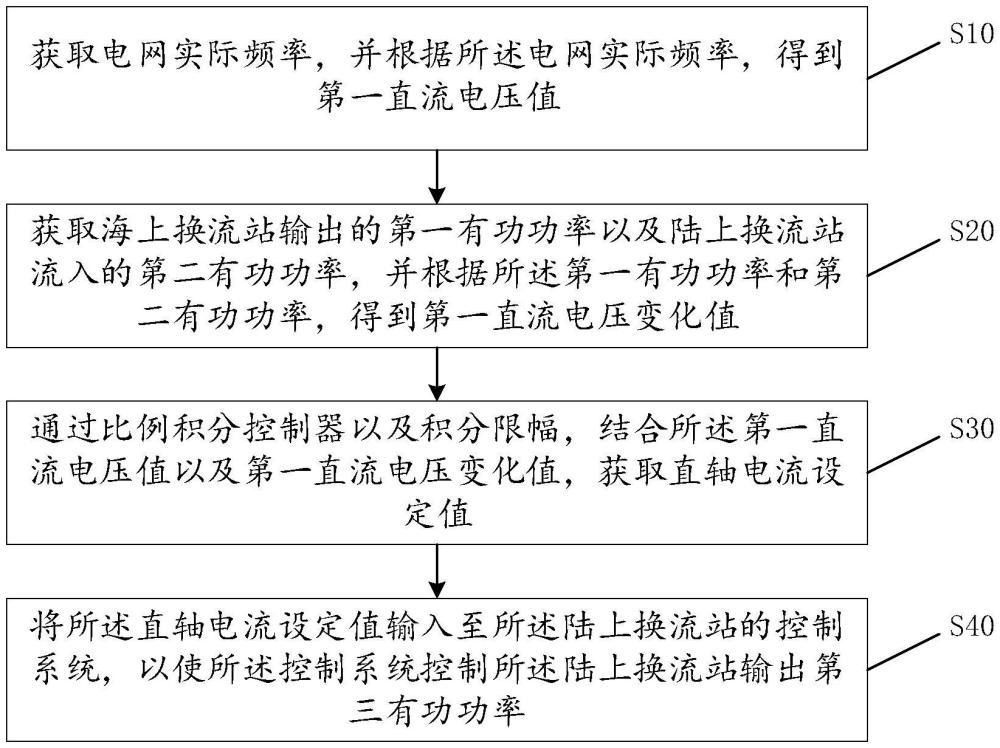
3、获取电网实际频率,并根据所述电网实际频率,得到第一直流电压值;
4、获取海上换流站输出的第一有功功率以及陆上换流站流入的第二有功功率,并根据所述第一有功功率和第二有功功率,得到第一直流电压变化值;
5、通过比例积分控制器以及积分限幅,结合所述第一直流电压值以及所述第一直流电压变化值,获取直轴电流设定值;
6、将所述直轴电流设定值输入至所述陆上换流站的控制系统,以使所述控制系统控制所述陆上换流站输出第三有功功率。
7、相比于现有技术,本技术实施例具有如下有益效果:电网实际频率的波动反映了电网负荷和发电之间的失衡状态,因此通过虚拟惯量控制技术,根据电网实际频率计算出来的第一直流电压值,可以准确响应海上风电系统中的频率变化,从而提升海上风电系统的稳定性;此外,当海上风电系统出现频率波动时,海上换流站输出的第一有功功率以及陆上换流站流入的第二有功功率之间会存在不平衡的问题,因此结合第一有功功率和第二有功功率,可以准确得计算出第一直流电压变化值,从而精确补偿直流电压值,提升系统的稳定性;最终通过考虑系统的功率平衡以及虚拟惯量的支撑问题,获取用于联合控制的直流电压值,并以此获取直轴电流设定值,有效提升了海上风电系统在不同干扰环境下的鲁棒性和抗扰动性能。
8、在本技术第一方面的实施例中,所述根据所述电网实际频率,得到第一直流电压值,包括:
9、将所述电网实际频率输入至第一控制模型,获取所述第一直流电压值;
10、所述第一控制模型,通过结合转子惯性运动方程以及直流电容两端的功率平衡方程搭建获取;所述直流电容两端,分别与所述海上换流站以及所述陆上换流站连接。
11、相比于现有技术,上述实施例具有如下有益效果:转子惯性运动方程描述了海上风机等旋转机械的惯性响应,而直流电容的功率平衡方程则考虑了电容器的能量储存和释放特性,通过综合考虑,建立第一控制模型,能够全面系统地反映电网频率的变化,并以此获取准确的第一直流电压值用于后续调控。
12、在本技术第一方面的实施例中,所述第一控制模型,通过结合转子惯性运动方程以及直流电容两端的功率平衡方程搭建获取,包括:
13、所述转子惯性运动方程,具体为:
14、
15、所述功率平衡方程,具体为:
16、
17、所述第一控制模型,具体为:
18、
19、其中,h为惯性时间常数;为电网实际频率f对时间t求偏导;fn为电网的额定功率;pm和pe分别为同步电机机械功率和电磁功率;c为海上换流站和陆上换流站相连接的直流电容;代表直流电容两端的第二直流电压值udc对时间t求导;pin和pout分别为海上换流站输出的第一有功功率和陆上换流站流入的第二有功功率;udc_ref为第一直流电压值;udcn为直流母线电压的额定值。
20、相比于现有技术,上述实施例具有如下有益效果:从上述转子惯性运动方程以及功率平衡方程可以看出,可以通过功率的变化,将直流电压值与频率的波动进行关联,从而可以获取表示第一直流电压值与电网实际频率的动态关联关系,且第一控制模型是基于基本物理关系进行联立获取,具有较高精确度的同时,还具有较高的可操作性,无需增加额外的硬件成本以支撑算力需求。
21、在本技术第一方面的实施例中,所述根据所述第一有功功率和第二有功功率,得到第一直流电压变化值,包括:
22、将所述电网实际频率、所述第一有功功率和第二有功功率输入至第二控制模型,获取所述第一直流电压变化值;
23、所述第二控制模型,通过结合第一下垂控制模型以及频率调节模型,搭建获取;
24、所述第一下垂控制模型,为通过结合si gmoi d函数以及第二下垂控制模型而获取。
25、相比于现有技术,上述实施例具有如下有益效果:通过在下垂控制模型中,加入sigmoi d函数做辅助调节,可以解决当电网频率大范围波动时,无法快速且有效进行响应的问题,主要原因是si gmoi d函数不仅能够自动对输出进行上下限约束,且调节带宽相比传统下垂控制范围更大,可以有效提升电网频率大范围波动时的海上风电系统的稳定性;通过结合改进后的第一下垂控制模型,可以有效提高频率调节模型的调控能力,从而提高最终获取的第二控制模型的调控效率。
26、在本技术第一方面的实施例中,所述第二控制模型,通过结合第一下垂控制模型以及频率调节模型,搭建获取,包括:
27、所述频率调节模型,具体为:
28、
29、所述第一下垂控制模型,具体为:
30、
31、所述第二控制模型,具体为:
32、
33、其中,δudc为第一直流电压变化值;δp为第一有功功率和第二有功功率的差值;f为电网实际频率;c为海上换流站和陆上换流站相连接的直流电容;kd为下垂系数;y为因变量;t为时间;e为自然常数;π为圆周率。
34、相比于现有技术,上述实施例具有如下有益效果:从频率调节模型可以看出,其参考了功率平衡公式,进一步做变形获取电网实际频率、第一有功功率和第二有功功率与用于调控的第一直流电压变化值之间的关系,结合加入了sigmoid函数以后的第一下垂控制模型,不仅考虑了功率平衡,还考虑了频率波动,从而准确获取第一直流电压变化值的同时,提高了响应频率波动的能力和效率。
35、在本技术第一方面的实施例中,所述通过比例积分控制器以及积分限幅,结合所述第一直流电压值以及所述第一直流电压变化值,获取直轴电流设定值,包括:
36、获取所述直流电容两端的第二直流电压值,并结合所述第一直流电压值以及所述第一直流电压变化值,获取第三直流电压值;
37、将所述第三直流电压值依次通过比例积分控制器以及积分限幅,获取所述直轴电流设定值。
38、相比于现有技术,上述实施例具有如下有益效果:获取第三直流电压值时,充分考虑了直流电容实际提供的第二直流电压值、考虑实际虚拟惯量需求的第一直流电压值以及考虑频率波动的第一直流电压变化值,减少单一电压值调控带来的误差,提高了陆上换流站的控制准确度;进一步通过比例积分控制器能够对电压误差进行精确调节,通过积分作用消除稳态误差,确保直流电流设定值更加准确。
39、在本技术第一方面的实施例中,所述获取所述直流电容两端的第二直流电压值,并结合所述第一直流电压值以及所述第一直流电压变化值,获取第三直流电压值,包括:
40、所述第三直流电压值的计算公式,具体为:
41、u3=udc_ref+δudc-udc
42、其中,u3为第三直流电压值;udc_ref为第一直流电压值;δudc为第一直流电压变化值;udc为所述直流电容两端的第二直流电压值。
43、相比于现有技术,上述实施例具有如下有益效果:由于第二直流电压值为直流电容实际提供的,在此基础上,还需要通过陆上换流站提供额外的直流电压值,以此提供虚拟惯量,因此通过第一直流电压值以及第一直流电压变化值的和减去第二直流电压值,可以准确获取需要调控陆上换流站所需的第三直流电压值。
44、第二方面,本技术实施例还提供一种海上风电系统陆上换流站的控制装置,包括:第一控制模块、第二控制模块、第一限幅模块以及第三控制模块;
45、其中,所述第一控制模块,用于获取电网实际频率,并根据所述电网实际频率,得到第一直流电压值;
46、所述第二控制模块,用于获取海上换流站输出的第一有功功率以及陆上换流站流入的第二有功功率,并根据所述第一有功功率和第二有功功率,得到第一直流电压变化值;
47、所述第一限幅模块,用于通过比例积分控制器以及积分限幅,结合所述第一直流电压值以及所述第一直流电压变化值,获取直轴电流设定值;
48、所述第三控制模块,用于将所述直轴电流设定值输入至所述陆上换流站的控制系统,以使所述控制系统控制所述陆上换流站输出第三有功功率。
49、在第二方面的一些实施例中,所述第一控制模块,用于根据所述电网实际频率,得到第一直流电压值,包括:
50、将所述电网实际频率输入至第一控制模型,获取所述第一直流电压值;
51、所述第一控制模型,通过结合转子惯性运动方程以及直流电容两端的功率平衡方程搭建获取;所述直流电容两端,分别与所述海上换流站以及所述陆上换流站连接。
52、在第二方面的一些实施例中,所述第一控制模型,通过结合转子惯性运动方程以及直流电容两端的功率平衡方程搭建获取,包括:
53、所述转子惯性运动方程,具体为:
54、
55、所述功率平衡方程,具体为:
56、
57、所述第一控制模型,具体为:
58、
59、其中,h为惯性时间常数;为电网实际频率f对时间t求偏导;fn为电网的额定功率;pm和pe分别为同步电机机械功率和电磁功率;c为海上换流站和陆上换流站相连接的直流电容;代表直流电容两端的第二直流电压值udc对时间t求导;pin和pout分别为海上换流站输出的第一有功功率和陆上换流站流入的第二有功功率;udc_ref为第一直流电压值;udcn为直流母线电压的额定值。
60、在第二方面的一些实施例中,所述第二控制模块,用于根据所述第一有功功率和第二有功功率,得到第一直流电压变化值,包括:
61、将所述电网实际频率、所述第一有功功率和第二有功功率输入至第二控制模型,获取所述第一直流电压变化值;
62、所述第二控制模型,通过结合第一下垂控制模型以及频率调节模型,搭建获取;
63、所述第一下垂控制模型,为通过结合sigmoid函数以及第二下垂控制模型而获取。
64、在第二方面的一些实施例中,所述第二控制模型,通过结合第一下垂控制模型以及频率调节模型,搭建获取,包括:
65、所述频率调节模型,具体为:
66、
67、所述第一下垂控制模型,具体为:
68、
69、所述第二控制模型,具体为:
70、
71、其中,δudc为第一直流电压变化值;δp为第一有功功率和第二有功功率的差值;f为电网实际频率;c为海上换流站和陆上换流站相连接的直流电容;kd为下垂系数;y为因变量;t为时间;e为自然常数;π为圆周率。
72、在第二方面的一些实施例中,所述通过比例积分控制器以及积分限幅,结合所述第一直流电压值以及所述第一直流电压变化值,获取直轴电流设定值,包括:
73、获取所述直流电容两端的第二直流电压值,并结合所述第一直流电压值以及所述第一直流电压变化值,获取第三直流电压值;
74、将所述第三直流电压值依次通过比例积分控制器以及积分限幅,获取所述直轴电流设定值。
75、在第二方面的一些实施例中,所述获取所述直流电容两端的第二直流电压值,并结合所述第一直流电压值以及所述第一直流电压变化值,获取第三直流电压值,包括:
76、所述第三直流电压值的计算公式,具体为:
77、u3=udc_ref+δudc-udc
78、其中,u3为第三直流电压值;udc_ref为第一直流电压值;δudc为第一直流电压变化值;udc为所述直流电容两端的第二直流电压值。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334064.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表