一种基于AIS的浅水环境船舶大气污染物排放估算方法
- 国知局
- 2024-11-21 12:04:10
本发明涉及船舶大气污染物排放估算,具体涉及一种基于ais的浅水环境船舶大气污染物排放估算方法。
背景技术:
1、随着全球航运业的快速发展,船舶排放逐年增长。然而,船舶在航行过程中排放大量的大气污染物,包括氮氧化物、硫氧化物、颗粒物和二氧化碳等大气污染物威胁着生态环境和居民健康。面对船舶大气污染排放的严峻形势,国际海事组织、国家以及地方政府都相继采取了政策措施,控制船舶大气污染物排放。自动识别系统(ais)作为一种用于船舶识别和跟踪的技术,广泛应用于海事管理和安全领域。由于能够提供船舶的实时位置、航速和航向等信息,并记录船舶的航行轨迹和历史数据,基于ais的船舶大气污染物排放估算方法成为主流。在内河和港口的部分浅水区域,浅水效应对船舶航行及排放特性有着显著影响。然而,目前关于船舶排放清单的研究多集中在深水环境,大部分模型是以远洋船舶为基础进行构建的,对浅水环境下的实际排放情况考虑不够充分。
2、目前船舶大气污染物排放估算方法主要分为两类:基于燃料的自上而下法和基于动力的自下而上法。
3、(1)基于燃料的自上而下法,是通过船舶的燃料消耗量和相应的排放因子来估算排放量。这种方法首先获取船舶在特定航行期间的总燃料消耗数据,然后根据不同燃料类型的排放因子,计算出对应的大气污染物排放量。该方法的优点是整体计算简单、易于操作,并能适用于大范围内的船舶排放估算。缺点是精度较低,因为实际排放受多种因素影响,单纯基于燃料消耗无法反映这些动态变化。
4、(2)基于动力的自下而上法,则是从船舶的实际运行状态出发,利用具体的航行参数和发动机功率来估算排放量。该方法通常通过ais数据获取实时的航速、航向和位置等信息,再计算实际运行中的发动机功率,最后利用发动机负荷与排放因子的关系,精确估算出各类大气污染物的排放量。此方法的优势在于精度较高,能够动态反映船舶在不同航行状态下的排放特性。但其缺点是计算复杂度较高,需大量实时数据支持,适用于详细分析和小范围精确估算。
5、由于数据不同源、数据获取困难及数学模型复杂等原因,现有船舶排放估算方法的理论模型大多针对深水环境设计,未充分考虑浅水环境中的特殊航行条件,如水位季节变化、潮汐影响和航道拥挤等因素,导致排放估算结果与实际排放偏差较大,且无法体现洪枯季和吃水变化对船舶排放的影响。
技术实现思路
1、发明目的:本发明提出了一种基于ais的浅水环境船舶大气污染物排放估算方法,通过综合利用ais数据和浅水环境特征,对船舶排放进行精确估算,以解决现有技术中存在的问题,提供一种适用于浅水环境的高精度船舶排放估算解决方案。
2、本发明采用的技术方案:一种基于ais的浅水环境船舶大气污染物排放估算方法,包括以下步骤:
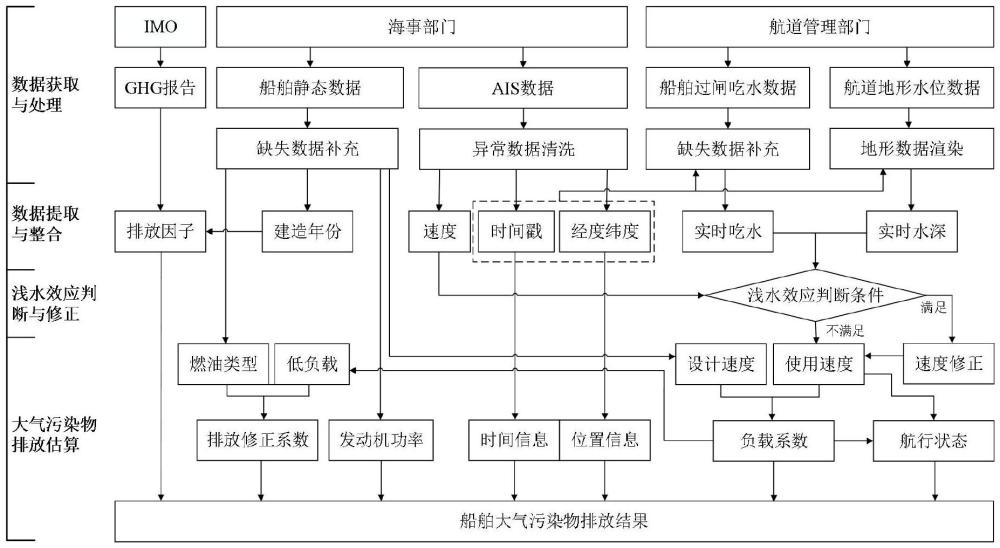
3、步骤1:数据获取与处理
4、从国际海事组织(imo)获取温室气体(ghg)报告,从海事部分获取船舶静态数据和ais数据,从航道管理部门获取船舶过闸吃水数据和航道地形水位数据;
5、对船舶静态数据和船舶过闸吃水数据的缺失数据进行补充,对ais数据的异常数据进行清洗,对航道地形水深数据中的地形数据进行渲染;
6、形成船舶静态数据库、ais数据库、船舶过闸吃水数据库和航道地形水位数据库;
7、步骤2:数据提取与整合
8、从ghg报告中提取船舶大气污染物排放因子;
9、从船舶静态数据库提取建造年份、燃油类型、发动机功率与设计速度;
10、从ais数据库提取船舶速度、时间戳和经纬度数据;
11、基于时间戳和经纬度数据,从船舶过闸吃水数据库提取实时吃水,从航道地形水位数据库提取实时水深;
12、步骤3:浅水效应判断与修正
13、基于船舶速度、实时吃水和实时水深,结合浅水效应判断条件,判断是否需要进行浅水效应修正;
14、对满足浅水效应判断条件的速度,进行速度修正,得到使用速度;对不满足浅水效应判断条件的速度,直接作为使用速度;
15、步骤4:大气污染物排放估算
16、基于设计速度和使用速度计算船舶发动机负载;
17、基于负载和使用速度划分船舶航行状态;
18、基于燃油类型和低负载确定排放修正系数;
19、基于时间戳和经纬度获得时间信息和空间信息;
20、基于排放因子、排放修正系数、发动机功率、时间信息、空间信息、负载系数和航行状态估算船舶大气污染物排放。
21、进一步的,所述步骤1中,所述船舶静态数据处理为:
22、根据数据是否完整,将船舶静态数据分为两类;数据完整的为已识别船舶,数据不完整的为未识别船舶;
23、船舶排放估算,不可缺少发动机功率数据;根据船舶类型将已识别船舶分类,并根据下式分别拟合船长与发动机功率之间的关系式:
24、y=axb
25、其中,x和y分别代表发动机功率和船长;a和b为拟合参数;
26、将未识别船舶根据船舶类型分类,并基于以上拟合的船长与发动机功率之间的关系式,补充所缺失的发动机功率数据。
27、进一步的,所述步骤1中,所述ais数据处理为:
28、对于重复数据以及缺失mmsi和船名的未识别数据,直接删除;
29、由于ais与岸基间的信息传输故障导致的漂移现象,对于轨迹数量少于10的数据予以删除;
30、对于时间间隔过短或位置漂移导致速度过大的轨迹点,设定速度限制以排除这些异常数据;
31、船舶停泊或关闭ais等原因可能导致轨迹点时间间隔过大,以10小时为时间间隔限制,对超过此限制的船舶轨迹进行分段处理。
32、进一步的,所述步骤1中,所述航道地形水深数据处理为:
33、(1)地形数据渲染
34、从航道高程数据中,提取航道内高程点的x、y、z值,这些值分别代表了空间位置的横坐标、纵坐标以及对应的高程信息;
35、将点坐标的地方独立坐标系转换为wgs_1984坐标系,将数据导入arcgis,利用反距离权重法进行格栅插值,生成格栅文件;
36、导入ais数据船舶轨迹点经纬度,使用arcgis的提取多值至点功能,将航道高程数据赋值给船舶轨迹;
37、(2)水位数据分配
38、采用船舶轨迹点到相邻上下游船闸中心点的直线距离作为依据,进行航段内部的水位分配;识别船舶轨迹点的具体日期以及所属航段,基于当日上下游船闸的对应水位数据,对轨迹点进行水位赋值;数学公式如下:
39、
40、d=r·haversine-1(φ2-φ1)+haversine(λ2-λ1)
41、
42、其中,θ为角度,单位:°;d为经纬度点(φ1,λ1)与点(φ2,λ2)之间的球面距离,单位:km;hp为船舶轨迹点的水位,单位:m;hdown为下游水位,单位:m;hup为上游水位,单位:m;ddown为船舶轨迹点至上游船闸距离,单位:km;dup为船舶轨迹点至下游船闸距离,单位:km。
43、进一步的,所述步骤1中,所述船舶过闸吃水数据处理为:
44、根据是否缺失过闸吃水数据,将船舶数据分为两类;类型1船舶有过闸吃水数据,类型2船舶缺失过闸吃水数据;
45、吃水数据为连续性变量,且通过经验分析可知吃水与船舶长度和船舶载重相关性高,因此选择linearregression线性回归模型进行类型2数据的吃水预测;
46、将类型1数据作为训练集,船长和载重作为特征值,吃水作为目标变量,进行线性回归模型训练。通过分析基础数据,发现拖轮及推轮的载重过大,且与其船长相关性不高,因此,将拖轮及推轮作为异常值删除,其余数据用于训练线性回归模型;
47、使用训练好的线性回归模型,预测补充类型2船舶吃水数据。
48、进一步的,所述步骤3中,所述浅水效应判断具体为:
49、以满足下式为条件,作为判断是否考虑浅水效应对船舶影响的依据:
50、h/t<3.0
51、
52、其中,h为航道水深,单位:m;t为船舶吃水,单位:m;frh为水深弗劳德数,单位:无量纲;v为船舶航速,单位:m/s;g为重力加速度,单位:m/s2。
53、进一步的,所述步骤3中,所述浅水效应修正具体为:
54、使用lackenby法对浅水效应的影响进行修正,船舶在浅水区的航速下降值与航速的关系如下式所示:
55、
56、其中,δv为船舶在浅水区的航速下降值,单位:m/s;am为船舶水下横剖面面积,单位:m2;
57、船舶水下横横剖面面积可以使用下式进行估算:
58、am=αbt
59、其中,b为船舶宽度,单位:m;α为参数,通常大型货船和内河船舶的航速较低,其船中横剖面较丰满,α取0.95,速度较高的船舶和小型舰船,船底自船中向舭部升高较大,α取0.75。
60、进一步的,所述步骤4中,所述大气污染物排放估算具体为:
61、内河船舶的大气污染物排放源主要为船舶发动机,包括主机和辅机;船舶大气污染物总排放使用下式计算:
62、e=em+ea
63、其中,e为船舶大气污染物排放,单位:g;em为船舶主机的大气污染物排放,单位:g;ea为船舶辅机的大气污染物排放,单位:g。
64、进一步的,所述步骤4中,所述船舶主机排放具体为:
65、考虑浅水效应的船舶主机的排放估算公式如下:
66、em=mcrm×lf×act×efm×fcf×llcf
67、其中,em为船舶主机的大气污染物排放,单位:g;mcrm为船舶主机的最大持续额定功率,单位:kw;nu为船舶航行使用主机数量,单位:个;lf为修正浅水效应影响后的单主机负载系数,单位:无量纲;act为船舶航行时间,单位:h;efm为船舶主机的大气污染物排放因子,单位:g/kw·h;fcf为燃油排放修正系数,单位:无量纲;llcf为低负载排放修正系数,单位:无量纲;
68、船舶发动机功率与发动机转速的三次方成正比,且在相同的环境条件下,船舶航速与发动机转速呈线性关系;因此,船舶发动机负载系数可根据船舶航行速度与最大设计速度比值的三次方进行计算,计算公式如下:
69、
70、其中,lf为负载系数,单位:无量纲;vu为船舶修正浅水效应影响后的使用速度,单位:m/s;vmax为船舶最大设计速度,单位:m/s;
71、基于船舶修正浅水效应影响后的航行速度与负载系数,将船舶航行状态分为停泊、锚泊、机动、低速巡航及巡航五类,具体的航行状态分类如表1所示。
72、表1船舶航行状态分类
73、 航行状态 速度 描述 停泊 小于1节 船舶关闭引擎 锚泊 1至3节 在船舶靠泊阶段 机动 3节至负载20% 在船舶减速或启动阶段 低速巡航 负载20%至65% 在内河或内海有速度限制水域航行 巡航 大于负载65% 在外海或宽阔航道水域航行
74、。
75、根据船舶发动机的类型以及建造或重建的年份,选取不同船舶主机的大气污染物排放因子。具体的主机大气污染物排放因子已详细列于表2中。
76、表2船舶主机大气污染物排放因子(g/kwh)
77、
78、注释:额定转速低于130r/min时,船舶发动机为低速柴油机;额定转速在130r/min至1400r/min范围内时,船舶发动机为中速柴油机。
79、对于船舶主机而言,排放修正系数分为燃油排放修正系数和低负载排放修正系数。
80、燃油排放修正系数,取值参考表3,低负载排放修正系数,取值参考表4。
81、表3燃料大气污染物排放修正因子
82、 燃油类型 <![cdata[pm<sub>10</sub>]]> <![cdata[pm<sub>2.5</sub>]]> dpm <![cdata[no<sub>x</sub>]]> <![cdata[so<sub>x</sub>]]> co vocs <![cdata[co<sub>2</sub>]]> <![cdata[n<sub>2</sub>o]]> <![cdata[ch<sub>4</sub>]]> ro(2.7%s) 1 1 1 1 1 1 1 1 1 1 hfo(1.5%s) 0.82 0.82 0.82 1 0.56 1 1 1 1 1 mgo(0.5%s) 0.39 0.39 0.39 0.9 0.18 1 1 1 0.9 1 mdo(1.5%s) 0.47 0.47 0.47 0.9 0.56 1 1 1 0.9 1 mgo(0.1%s) 0.35 0.35 0.35 0.9 0.04 1 1 1 0.9 1
83、注释:mdo为船用重柴油(marine diesel oil);表中括号内为燃料的硫含量。
84、表4船舶主机低负载大气污染物排放修正系数
85、 lf <![cdata[pm<sub>10</sub>]]> <![cdata[pm<sub>2.5</sub>]]> dpm <![cdata[no<sub>x</sub>]]> <![cdata[so<sub>x</sub>]]> co hc <![cdata[co<sub>2</sub>]]> <![cdata[n<sub>2</sub>o]]> <![cdata[ch<sub>4</sub>]]> 1% 19.17 19.17 0 11.47 5.99 19.32 59.28 5.82 0 0 2% 7.29 7.29 7.29 4.63 3.36 9.7 21.18 3.28 4.63 21.18 3% 4.33 4.33 4.33 2.92 2.49 6.49 11.68 2.44 2.92 11.68 4% 3.09 3.09 3.09 2.21 2.05 4.86 7.71 2.01 2.21 7.71 5% 2.44 2.44 2.44 1.83 1.79 3.9 5.61 1.76 1.83 5.61 6% 2.04 2.04 2.04 1.6 1.61 3.26 4.35 1.59 1.6 4.35 7% 1.79 1.79 1.79 1.45 1.49 2.8 3.52 1.47 1.45 3.52 8% 1.61 1.61 1.61 1.35 1.39 2.45 2.95 1.38 1.35 2.95 9% 1.48 1.48 1.48 1.27 1.32 2.18 2.52 1.31 1.27 2.52 10% 1.38 1.38 1.38 1.22 1.26 1.97 2.18 1.25 1.22 2.18 11% 1.3 1.3 1.3 1.17 1.21 1.79 1.96 1.21 1.17 1.96 12% 1.24 1.24 1.24 1.14 1.18 1.64 1.76 1.17 1.14 1.76 13% 1.19 1.19 1.19 1.11 1.14 1.52 1.6 1.14 1.11 1.6 14% 1.15 1.15 1.15 1.08 1.11 1.41 1.47 1.11 1.08 1.47 15% 1.11 1.11 1.11 1.06 1.09 1.32 1.36 1.08 1.06 1.36 16% 1.08 1.08 1.08 1.05 1.07 1.24 1.26 1.06 1.05 1.26 17% 1.06 1.06 1.06 1.03 1.05 1.17 1.18 1.04 1.03 1.18 18% 1.04 1.04 1.04 1.02 1.03 1.11 1.11 1.03 1.02 1.11 19% 1.02 1.02 1.02 1.01 1.01 1.05 1.05 1.01 1.01 1.05 20% 1 1 1 1 1 1 1 1 1 1 >20% 1 1 1 1 1 1 1 1 1 1
86、。
87、进一步的,所述步骤4中,所述船舶辅机排放具体为:
88、船舶辅机的排放估算公式如下:
89、ea=mcra×lfa×act×efa×fcf
90、其中,ea为船舶辅机的大气污染物排放,单位:g;mcra为船舶辅机的最大持续额度定功率,单位:kw;lfa为船舶辅机负载系数,单位:无量纲;efa为船舶辅机的大气污染物排放因子,单位:g/kw·h;cfa为船舶辅机的各种修正系数的乘积,单位:无量纲。
91、而不同类型船舶辅机在不同航行状态下的负载系数见表5。
92、表5不同类型船舶辅机在不同航行状态下的负载系数
93、
94、
95、依据船舶的建造或重建年份进行选取船舶辅机的大气污染物排放因子,具体可参考表6。
96、表6船舶辅机大气污染物排放因子(g/kwh)
97、
98、船舶静态数据库一般不会记录船舶辅机功率,因此在排放估算模型中,使用辅机主机功率比与主机最多持续额定功率相乘来计算船舶辅机功率,如下式所示。船舶辅机主机功率比参照表7进行选取。
99、mcra=mcrm×amr
100、其中,amr为船舶辅机主机功率比,单位:无量纲。
101、表7不同船舶类型辅机主机功率比
102、 类型编号 船舶类型 辅机主机功率比 1 干货船 0.222 2 一般货船 0.191 3 拖船 0.222 4 油船 0.211 5 客船 0.278 6 集装箱船 0.220 7 渔船 0.222 8 其他类型 0.222
103、。
104、有益效果:
105、本发明解决了传统船舶排放估算方法在面对浅水环境时,由于数据多源性、数据获取难度高以及数学模型复杂性所带来的估算不精确问题。该方法通过创新性地整合航道管理部门提供的船舶过闸吃水数据和航道地形水位数据,并结合ais数据中的时间戳与经纬度信息,成功地补充了关键的实时吃水与水深数据。在数据处理过程中,本发明基于浅水效应的判断条件,通过精确的速度修正,有效减少了浅水效应对排放估算的干扰,从而显著提升了浅水环境中船舶排放估算的准确度。与传统的船舶排放估算方法相比,本发明不仅考虑了浅水效应的影响,更通过实时数据的引入,精确捕捉了洪枯季水位波动和船舶吃水变化对排放的影响。这种创新性的方法不仅提升了估算的精确性,也为船舶排放管理提供了更为科学、可靠的数据支持。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334110.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表