一种基于电压外环的负直轴电流补偿弱磁控制系统
- 国知局
- 2024-11-21 12:04:34
本发明涉及负直轴电流补偿弱磁控制系统,具体为一种基于电压外环的负直轴电流补偿弱磁控制系统。
背景技术:
1、负直轴电流补偿弱磁控制系统的作用是在低速和低负载情况下,通过调节直轴电流的大小来实现电机的弱磁状态,从而提高整个系统的效率和性能,在控制ipmsm的过程中,负id电流弱磁控制是一项重要的技术,这项技术的核心是通过控制电机的直轴电流来实现弱磁状态,通过减小直轴电流,可以降低电机产生的磁场强度,从而实现弱磁状态,在这种状态下,电机的机械损耗和涡流损耗都会显著降低,同时也能提高电机的响应速度和动态性能,为了保证电机在弱磁状态下的正常运行,还需要对速度环进行控制,在负id电流弱磁控制中,速度环输出给定电流,这个给定电流是通过mtpa算法计算得到的dq轴电流,mtpa算法是一种优化算法,通过调整dq轴电流的大小和相位来实现电机在最大转矩和最小电流之间的最佳匹配,这些控制策略的应用,能够提高电机系统的效率和性能,为工业应用和电动汽车领域带来更好的使用体验。
2、此外,当电机工作在额定转速以下时,由于dq轴电流给定恒定,电流矢量与d轴的夹角也为恒定值,但当转速超过额定转速时,需要通过对dq轴电流分量进行重新分配以实现弱磁,这时可以通过改变电流矢量角来改变dq轴电流给定,在电压环的作用下得到了新的电流矢量相位值,于是在新的电流矢量幅值和相位作用下,便得出了新的一组dq轴电流给定,通过电流调节器的调节使实际的dq轴电流跟踪给定,交直轴电流产生电磁转矩,使电机转速按照给定上升,以达到弱磁扩速的效果。
3、但是,传统的负直轴电流补偿弱磁控制系统存在以下缺点:
4、传统的负直轴电流补偿弱磁控制系统在负载变化较快较大时,会出现电流环实时处于饱和,且无法退出饱和状态,从而导致电机失控的现象出现,影响电机的正常使用。
技术实现思路
1、本发明的目的在于提供一种基于电压外环的负直轴电流补偿弱磁控制系统,以解决上述背景技术中提出的传统的负直轴电流补偿弱磁控制系统在负载变化较快较大时,会出现电流环实时处于饱和,且无法退出饱和状态,从而导致电机失控的现象出现,影响电机的正常使用的问题。
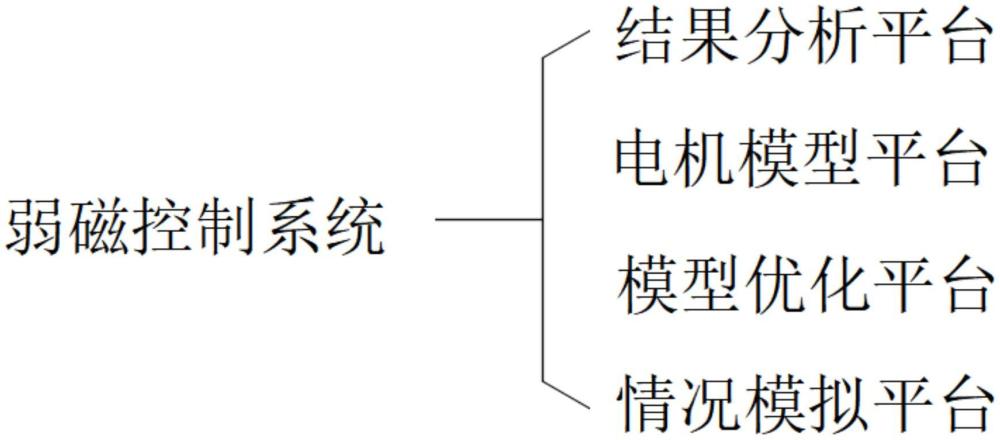
2、为实现上述目的,本发明提供如下技术方案:一种基于电压外环的负直轴电流补偿弱磁控制系统,包括弱磁控制系统,所述弱磁控制系统包括结果分析平台、电机模型平台、模型优化平台和情况模拟平台;
3、所述电机模型平台对控制的电机进行特征提取后设立与之相关联电机模型;
4、所述模型优化平台通过电压外环法求解出直轴电流参考值并对模型进行优化;
5、所述情况模拟平台对电机使用各种情况进行模拟;
6、所述结果分析平台对电压外环调节后的负直轴电流补偿弱磁控制数值和结果进行验证。
7、作为本发明的一种优选技术方案,所述电机模型平台在同步参考坐标系下,设立永磁同步电机数学模型为:式中,ud、uq分别为电机定子电压直轴、交轴分量;id、iq分别为电机定子电流直轴、交轴分量;ld、lq分别为电机直轴、交轴电感;rs为电机定子电阻;ωe为电机电角速度;ψf为电机永磁体磁链,永磁同步电机运行时最大输入电压受到逆变器直流侧电压及电机绝缘等级的限制,定子电压过高时会击穿绝缘层,损坏电机,故应满足的电压限制为式中,usmax为电机定子端电压合成矢量的最大幅值,usmax取dc3u,udc为直流母线电压,另外,受系统温升约束,电机稳定运行时,定子电流合成矢量幅值不能超过最大允许幅值ismax,即pmsm高速运行时,忽略定子电阻压降的影响,稳态电压写成,pmsm电磁转矩计算公式为:式中,p为电机极对数。
8、作为本发明的一种优选技术方案,所述电机模型平台包括电机类型模块、技术指标模块、硬件组件模块和软件组件模块,所述电机类型模块支持多种类型的电机,包括直流电动机和交流电动机,交流电动机进一步分为单相电动机和三相电动机,所述技术指标模块具体为步进电机的速度-力矩曲线是表现其输出特性的重要参数,包括工作频率点、自启动区域、连续运行区域、最高启动频率、最高运行频率、启动力矩/牵入力矩、运行力矩/牵出力矩,在特定的科研平台中,还包括不同类型的光源如方形光源、条形光源、环形光源、碗状光源和光源控制器,以满足实验中对光照条件的需求,所述硬件组件模块包括电机快速原型控制器、永磁同步电机、高压线束及接插件、信号控制盒、数据采集模块、数据记录仪、电流传感器、模块供电专用电源、can-usb接口转换线和台架用电脑,所述软件组件模块包括电机控制策略开发软件平台、电机控制策略simulink模型和数据采集分析软件。
9、作为本发明的一种优选技术方案,所述模型优化平台依据交轴电流参考值由速度环生成来平衡负载转矩,则弱磁一区和弱磁二区均根据电压方程来直接求解出直轴电流参考值。
10、作为本发明的一种优选技术方案,所述模型优化平台的计算公式具体如下:id、iq分别为电机定子电流直轴、交轴分量;ld、lq分别为电机直轴、交轴电感;rs为电机定子电阻;ωe为电机电角速度;ψf为电机永磁体磁链。
11、作为本发明的一种优选技术方案,所述模型优化平台使用时需注意:电压外环法的弱磁增益选取,弱磁增益根据弱磁控制小信号模型进行自适应计算;进出弱磁区判断条件,防止低速、重载、急加速下误入弱磁控制区域;弱磁控制pi给定电压的裕量,保留一定的电压裕量有利于权衡弱磁控制的动稳态性能;弱磁控制pli限幅选取,该限幅受到电流极限圆、mtpa和mtpv的多重限制;电流环电流控制环路带宽弱一些的前馈解耦有利于弱磁区域的快速进入和快速退出,电流环不能做到近似的无限带宽,就一定会出现积分饱和现象,前馈解耦有利于在转速突变或负载突变时在一定程度上来削弱积分饱和现象。
12、作为本发明的一种优选技术方案,所述情况模拟平台构建pmsm不同使用环境情况下的弱磁控制系统,在基速以下搭建mtpa模块,利用直轴电流补偿弱磁控制的交轴电感lq、直轴电感ld、永磁体磁链ψf及定子电流is计算得到直轴电流id0;实时计算电流调节器输出的电压综合矢量同时与根据母线电压得到的逆变器输出电压外环极限值进行比较,当us>ulim时,直轴电流补偿值δid0为负值;否则的话,δid0为0,其中,ud为电流调节器输出的直轴电压;uq为电流调节器输出的交轴电压;udc为直流母线电压,将mtpa控制法下计算得到的直轴电流id0与各种情况下需要补偿的直轴电流δid0相加,得到给定的直轴电流再利用ipmsm的电流极限圆方程计算得出给定的交轴电流。
13、作为本发明的一种优选技术方案,所述结果分析平台包括仿真结果分析模块和实验结果分析模块,所述仿真结果分析模块验证设计基于电压外环的弱磁控制算法的有效性,在电压外环仿真软件中搭建基于电压外环的弱磁控制电机电流调节器弱磁控制系统仿真模型并对结果进行分析,所述实验结果分析模块通过对电机进行实验对基于电压外环的弱磁控制电机电流的调节过程进行验证分析。
14、与现有技术相比,本发明的有益效果是:采用基于电压外环的负直轴电流补偿弱磁控制系统对负直轴电流参数进行调节,方法简单,容易实现,且通过控制电压外环输出负的直轴电流,实现ipmsm的弱磁状态,通过速度环的精确调控,实现电机的准确控制,整个过程抑制干扰能力强,有效将弱磁控制的鲁棒性和带载能力有效结合起来,在负载变化较快较大时,便于电流环退出饱和状态,避免出现电机失控的现象,保证电机的正常使用。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334138.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表