使用锁相放大器监督医疗装置中的保护接地连续性的方法和电路与流程
- 国知局
- 2024-11-21 12:28:30
本文公开的系统和方法涉及具有保护接地连接的系统,并且更具体地涉及具有保护接地连接的医疗系统。
背景技术:
1、机器人使能的医疗系统能够执行多种医疗规程,包括诸如腹腔镜检查的微创规程和诸如内窥镜检查(例如,支气管镜、输尿管镜检查、胃镜等)的非侵入规程两者。此类机器人医疗系统可包括被配置为在给定医疗规程期间控制医疗工具的移动的金属壳体和机器人臂。
技术实现思路
1、本公开的系统、方法和装置各自具有若干创新方面,这些创新方面中没有一个独自负责本文所公开的期望属性。
2、带有金属壳体的医疗装置需要功能性保护接地(pe)连接,以保护患者和操作者免受电击。为了实现功能性pe连接,金属壳体可以连接到电气地(gnd)线。
3、在医疗装置的寿命期间具有测试pe连接的方法可以是有益的,以检测pe连接是否随着时间的推移而退化,特别是对于金属壳体与gnd线之间连接较少的医疗装置。然而,在医疗装置的寿命期间测试pe连接可以是具有挑战性的。第一,如果测试电流未保持在较低水平(例如,小于100微安或小于50微安),则向金属壳体施加测试电流可能会造成触电危险。第二,金属壳体与gnd线之间的pe连接可具有低阻抗(例如,小于1欧姆),并且因此施加测试电流的输出也可能是低的(例如,低于100微伏),并且因此难以检测和测量。第三,pe连接可能会受到电磁干扰的影响,电磁干扰会增加噪声,并且使小信号的测量更具挑战性。
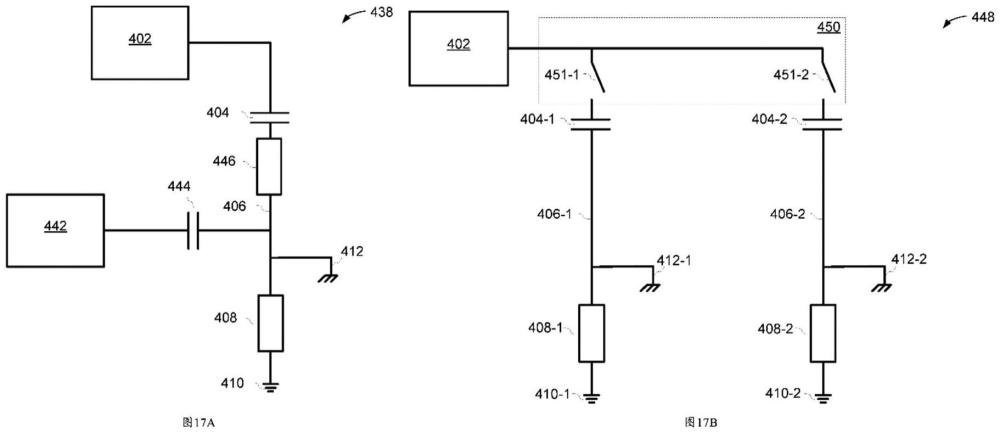
4、在一个方面,机器人系统可包括电气地线和在第一点处电耦合到该电气地线的保护接地线。机器人系统还包括测试电路(有时也称为监测电路),该测试电路在第二点处经由隔离电容器耦合到保护接地线,该测试电路包括锁相放大器并且被配置为测量保护接地线的阻抗。
5、在另一方面,机器人系统包括电气地线、保护接地线和测试电路,该测试电路经由隔离电容器耦合到保护接地线并且被配置为测量通过隔离电容器的电气地线到保护接地线的阻抗。
6、在另一方面,机器人系统包括电气地线、保护接地线和测试电路,该测试电路耦合到保护接地线并且被配置为测量电气地线到保护接地线的阻抗。
7、在另一方面,用于测试保护接地线的方法包括通过电耦合到保护接地线的隔离电容器施加测试信号(或向该隔离电容器施加信号),以及响应于测试信号经由隔离电容器从保护接地线获得信号。该方法还包括基于所获得的信号测量保护接地线的阻抗,该测量由锁相放大器执行;将所确定的阻抗与基线阻抗进行比较;以及提供指示比较的结果的信息。在一些实施方案中,该方法由执行存储在存储器中的指令的一个或多个处理器执行。
8、在另一方面,用于测试保护接地线的方法包括通过电耦合到保护接地线的隔离电容器提供测试电流,以及响应于测试电流获得通过隔离电容器的电压信号。该方法还包括基于所获得的电压信号确定保护接地线的阻抗;以及基于所确定的阻抗提供指示保护接地线的连续性的信息。在一些实施方案中,该方法由执行存储在存储器中的指令的一个或多个处理器执行。
9、需注意,上述各种实施方案可与本文所述的任何其他实施方案组合。在说明书中描述的特征和优点不是全部包含的,并且特别地,考虑到附图、说明书和权利要求书,许多另外的特征和优点对于本领域的普通技术人员将是显而易见的。此外,应当注意,说明书中使用的语言主要是为了可读性和指导目的而选择的,并且可能不是为了描绘或限制本发明的主题而选择的。
技术特征:1.一种机器人系统,所述机器人系统包括:
2.根据权利要求1所述的机器人系统,其中所述锁相放大器包括:
3.根据权利要求2所述的机器人系统,其中所述信号发生器被配置为输出最大峰值电流低于安全阈值的信号。
4.根据权利要求1所述的机器人系统,其中所述锁相放大器包括数字信号处理(dsp)电路。
5.根据权利要求1所述的机器人系统,其中所述第二点远离所述第一点,并且所述测试电路被配置为测量所述第一点与所述第二点之间的阻抗。
6.根据权利要求5所述的机器人系统,其中所述机器人系统包括一个或多个接头,并且其中测量所述第一点与所述第二点之间的所述阻抗包括测量通过所述一个或多个接头的阻抗。
7.根据权利要求5所述的机器人系统,其中:
8.根据权利要求1所述的机器人系统,所述机器人系统还包括:
9.根据权利要求8所述的机器人系统,其中:
10.根据权利要求1所述的机器人系统,所述机器人系统还包括耦合到所述测试电路的控制器,其中所述控制器被配置为:
11.根据权利要求10所述的机器人系统,所述机器人系统还包括用户界面,所述用户界面被配置为向所述机器人系统的操作者呈现关于所识别的短路和所识别的不连续性的信息。
12.根据权利要求1所述的机器人系统,其中所述机器人系统被配置为使用所述测试电路定期测试所述保护接地线。
13.根据权利要求1所述的机器人系统,其中所述机器人系统被配置为使用所述测试电路作为所述机器人系统的启动序列的一部分来测试所述保护接地线。
14.根据权利要求1所述的机器人系统,所述机器人系统还包括金属壳体,其中所述保护接地线电耦合到所述金属壳体。
15.一种用于测试机器人系统的保护接地线的方法,所述方法包括:
16.根据权利要求15所述的方法,其中所述测量包括:
17.根据权利要求15所述的方法,其中测量所述保护接地线的所述阻抗包括测量通过所述机器人系统的一个或多个接头的阻抗。
18.根据权利要求15所述的方法,其中测量所述保护接地线的所述阻抗包括测量通过所述隔离电容器到与所述保护接地线电耦合的电气地线的阻抗。
19.根据权利要求18所述的方法,其中所述比较包括:
20.根据权利要求19所述的方法,其中提供指示所述比较的所述结果的所述信息包括向所述机器人系统的操作者呈现关于所识别的短路和所识别的不连续性的信息。
21.根据权利要求15所述的方法,其中所述方法作为所述机器人系统的启动序列的一部分执行。
22.一种机器人系统,所述机器人系统包括:
23.根据权利要求22所述的机器人系统,其中所述测试电路包括锁相放大器。
24.一种用于测试机器人系统的保护接地线的方法,所述方法包括:
25.根据权利要求24所述的方法,其中所述测试电流以载波频率提供,并且所述方法还包括使用锁相放大器放大具有所述载波频率的所述电压信号的分量。
技术总结一种机器人系统可包括电气地线和电耦合到该电气地线的保护接地线。该机器人系统还可包括经由隔离电容器耦合到该保护接地线的测试电路。该测试电路可包括锁相放大器并且可被配置为测量通过该隔离电容器的该保护接地线的阻抗。本文还公开了用于测试或监测保护接地线的方法。技术研发人员:E·阿克利文,J·伯纳德,C·P·海瑟薇,M·卡诺古斯基受保护的技术使用者:奥瑞斯健康公司技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/335415.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表