基于虚拟基准线的路基横向位移监测方法与流程
- 国知局
- 2024-11-25 15:01:48
本发明涉及工程监测技术,特别涉及一种基于虚拟基准线的路基横向位移监测方法。
背景技术:
1、高速公路尤其是长大高速公路由于跨度较长,沿线地形、地质条件复杂多变,不可避免地会遇到高边坡、软土路基、公铁共建、河道路基共建等特殊地段。这些地段潜在形变风险往往较大,严重的会导致路面出现波浪状起伏、路面纵向开裂,甚至出现路基滑坡、塌方等问题,严重影响着行车安全以及人民生命财产安全。因此在高速公路修建以及运营过程中,需要针对风险较大路段进行有针对性的路基监测。路基监测往往同时开展多个监测项目,其中非常重要的一项为路基横向位移监测,常被用于研判路基横向安全状态。路基横向位移监测断面间距往往设置为100m~200m不等;每个监测断面往往设置2~4个监测点不等;监测频次一周到一年不等;运营期往往为全封闭式运营等。也即是说高速公路路基横向位移监测往往具有显著的监测路段长但监测断面间距远、断面内测点少、监测间隔时间长、联测基准点困难、横穿公路风险较大等诸多特点。而目前路基横向位移监测主要采用gnss静态观测与全站仪导线相结合方法,该方法需在高速公路上布设较多的工作基点并通过gnss静态观测联测已知基准点,全站仪导线作业时需严格执行多测回作业,否则精度将难以保证,这也就导致该方法作业效率大打折扣。
2、因此,寻求一种精度可靠作业高效的路基横向位移监测方法就成了摆在广大科技工作者面前亟需解决的一道难题。
技术实现思路
1、本发明的目的在于克服现有监测方法的不足,提出一种基于虚拟基准线的路基横向位移监测方法,所述监测方法实质上是一种通过一定方式构造一条精确的虚拟基准线进而根据监测点与虚拟基准线平面相对位置关系推算得到路基横向位移的新方法。该方法规避了现有方法必须联测已知基准点方能开展监测作业的限制,也规避了全站仪导线法必须多测回作业的要求,极大地提高了作业效率,且所述监测方法也适用于基坑水平位移监测。
2、一种基于虚拟基准线的路基横向位移监测方法,包括:
3、步骤一:构造后视照准区和布设监测点;在距离待监测路基一侧3倍路基宽度范围外确定参照物,根据理想状态下某一外立面上任意一点均应投影在同一条直线上的原理,设定一条直线作为虚拟基准线;并在朝向所述待监测路基的平面上确定第一后视照准区和第二后视照准区;
4、在待监测路基横断面上布设多个横向位移监测点;
5、步骤二:现场测存:在距离横向位移监测点纵向20-50m位置架设一精密全站仪,所述全站仪中心轴所在位置作为测站点;采用自由设站免棱镜/反射片模式依次测存第一后视照准区的任意测点、第二后视照准区的任意测点和监测横断面上全部横向位移监测点,并测存位置数据;
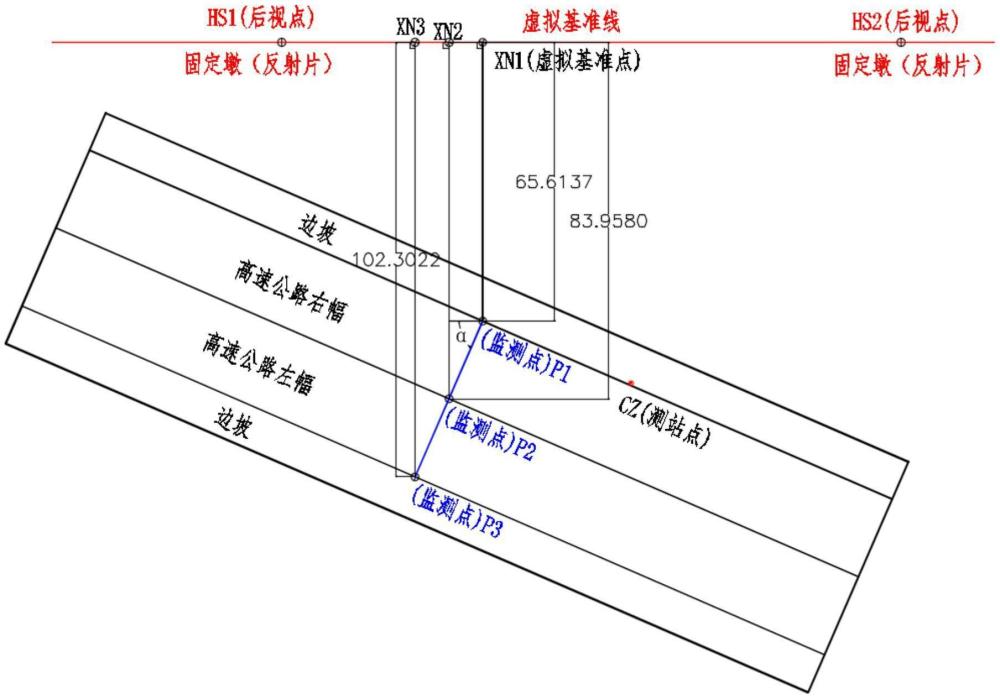
6、根据测存的位置数据利用制图软件,绘制第一后视照准区的测点、第二后视照准区的测点和全部横向位移监测点的平面视图;连接第一后视照准区的测点、第二后视照准区的测点形成虚拟基准线;
7、通过制图软件绘制各横向位移监测点到虚拟基准线的垂线,垂足为对应的虚拟基准点,通过量距功能获得各横向位移监测点到虚拟基准线的垂距;
8、步骤三:根据预设的监测频率,在相同测站点执行步骤二获得各横向位移监测点的垂距,当前垂距与初始垂距作差即可获得垂距变化量,由于垂距变化量为路基横向位移在横向位移监测点到虚拟基准线的垂线上的投影,因此,通过垂距变化量与路基横向位移的三角函数关系能够推算获得各监测点的路基横向位移。其中,三角函数关系中横向位移监测点到虚拟基准线的垂线与路基边线的夹角为一常数,可通过诸如量角工具获得。
9、进一步的,为提高初始垂距的可靠性,所述步骤二还包括:多次独立测量各横向位移监测点到虚拟基准线的垂距,取多次独立测量的垂距的平均值作为初始垂距。
10、可选的,所述步骤二和步骤三包括如下步骤:
11、步骤二:现场测存:在距离横向位移监测点纵向20-50m位置架设一精密全站仪,所述全站仪中心轴所在位置作为测站点;采用自由设站免棱镜/反射片模式依次测存第一后视照准区的任意测点、第二后视照准区的任意测点和监测横断面上全部横向位移监测点,并测存位置数据;
12、根据测存的位置数据利用制图软件,绘制第一后视照准区的测点、第二后视照准区的测点和全部横向位移监测点的平面视图;连接第一后视照准区的测点、第二后视照准区的测点形成虚线基准线;
13、断面内任意两个监测点的连线方向可视为路基横向位移方向,断面内任意两个监测点的连线与虚拟基准线的交点即为虚拟基准点;通过制图软件的量距功能即可获取监测点到虚拟基准点的水平距;
14、步骤三:根据预设的监测频率,在相同测站点执行步骤二获得当前监测点到虚拟基准点的水平距;当前水平距与初始水平距的变化量即为路基横向位移变化量。
15、进一步的,所述步骤二还包括:多次独立测量监测点到虚拟基准点的水平距,取多次独立测量的水平距的平均值作为初始水平距。
16、优选的,所述基于虚拟基准线的路基横向位移监测方法,包括:
17、步骤一:构造后视照准区;在监测断面延长线监测路基边坡下坡角3倍路基宽度范围外人工布设2个观测墩作为参照物,观测墩间距在20~50m,所述第一后视照准区和第二后视照准区分别位于一个观测墩上且两个后视照准区面向测站点布设。为提高虚拟基准线的准确性与一致性,两个观测墩连线与监测断面线尽量垂直以提高图形形状,在每个观测墩上布设一个反射片,上述两个反射片即为所述方法的第一、第二后视照准区。通过精密全站仪视准线法使反射片尽可能位于同一立面内以削弱照准误差影响,同时也可以由此提高照准信号反射强度。
18、步骤二:布设监测点。在监测横断面上采用gnss精确放样并布设横向位移监测点;为提高监测数据精度以及避免人员横穿公路,监测点宜为反射片模式,并通过全站仪视准线法确保监测点反射片尽可能处于同一立面内;
19、步骤三:现场测存。在距离监测横断面路基纵向30m左右位置架设全站仪,采用自由设站免棱镜/反射片模式依次测存第一后视照准区任意测点、第二后视照准区任意测点和断面上所有横向位移监测点。
20、步骤四:测点展绘与处理。测存数据通过制图软件展点工具即可得到测存断面第一后视照准区测点、第二后视照准区测点与断面上横向位移监测点的平面视图;通过第一后视照准区测点、第二后视照准区测点即可构造虚拟基准线;通过制图软件绘制各横向位移监测点到虚拟基准线的垂线,垂足为对应的虚拟基准点,通过量距功能即可获得各横向位移监测点到虚拟基准线的垂距;为提高初始垂距的可靠性,取3次独立测量后推算的垂距平均值为初始值。
21、步骤五:根据预设监测频率,重复执行步骤三、步骤四获得各横向位移监测点的垂距变化量,由于垂距变化量为路基横向位移在横向位移监测点到虚拟基准线的垂线上的投影,因此,通过垂距变化量与路基横向位移的三角函数关系即可推算获得各监测点的路基横向位移。
22、当所述参照物为两个人工埋设的观测墩时,此种情况是针对在待监测路基边坡下坡脚3倍路基宽度范围外不存在稳固而规则的建构筑物的情况,则其替代方式亦可为2个人工布设的稳固反射片,反射片宜通过全站仪视准线法尽可能布设在同一立面内,虚拟基准点宜位于两个反射片之间,反射片朝向测站点。
23、可选的,在步骤一中构造后视照准区采取如下方式:
24、假定在待监测路基边坡下坡脚3倍路基宽度范围外存在一稳固而规则建构筑物,且理想状态下其朝向所述待监测路基的一外立面上任意一点均应投影在同一条直线上,也即所述方法的虚拟基准线;为了尽量提高虚拟基准线的一致性,在建构筑物某一外立面左右两端宜分别选定一个5cm*5cm左右照准区作为后视照准区,照准区尽量同等高度,以削弱建构筑物倾斜造成的误差。
25、可选的,所述步骤三至步骤五包括如下步骤:
26、步骤三:现场测存。在距离监测横断面路基纵向30m左右位置架设全站仪,采用自由设站免棱镜/反射片模式依次测存第一后视照准区任意测点、第二后视照准区任意测点和断面上所有横向位移监测点。
27、步骤四:测点展绘与处理。测存数据通过制图软件展点工具即可得到测存断面第一后视照准区测点、第二后视照准区测点与断面上横向位移监测点的平面视图;通过第一后视照准区测点、第二后视照准区测点即可构造虚拟基准线;断面内任意两个监测点的连线方向可视为路基横向位移方向,断面内任意两个监测点的连线与虚拟基准线的交点即为虚拟基准点;通过量距功能即可获取监测点到虚拟基准点的水平距,为了提高初始水平距地可靠性,一般取3次独立水平距的平均值作为初始值。
28、步骤五:根据预设监测频率,重复执行步骤三、步骤四获得当前监测点到虚拟基准点的水平距,当前水平距与初始水平距的变化量即为路基横向位移。
29、优选的,所述参照物为稳定的建构筑物,所述第一后视照准区和第二后视照准区位于同等高度。
30、特别优选的,所述第一后视照准区和第二后视照准区所在位置粘贴反射片,以提高虚拟基准线的一致性。
31、优选的,横向位移监测点利用gnss卫星进行放样定位,所述监测点采用反射片模式稳固布设在路面上。
32、进一步的,根据所述虚拟基准线的路基横向位移监测方法,选择建构筑物上某一特征点作为竖向位移的基准点,在步骤三中同步获得该基准点与各监测点的竖向高差,在步骤五中当前竖向高差与初始竖向高差的变化量,即可视为路基竖向位移。
33、优选的,所述竖向位移基准点宜为所述第一后视照准区或第二后视照准区上的任一测点。
34、可选的,所述竖向位移基准点可为建构筑上某一特征点。
35、与现有技术相比,本发明的技术方案所带来的有益效果是:
36、1.与常规gnss静态观测法、导线法等相比,常规方法均需已知基准点精确坐标,方可推算监测点坐标,而本发明所述监测方法对基准点以及基准点坐标均无特别要求,只要待测现场具备构造虚拟基准线条件即可;另外本方法施测时每个监测横断面均可采用自由设站免棱镜/反射片模式独立施测,可以有效规避后视照准误差、累计误差、仪器高误差等,使得该方法作业精度、作业效率以及现场可操作性均大幅提高,具有很强地实用性。
37、2.该方法同步解决了基准点联测困难、横向通视条件差、不许横穿公路、作业效率低等诸多难题,同时在一定条件下还可同步用于竖向位移监测,也可以直接推广应用于市政工程等基坑水平与竖向位移监测场景,具有很强地普适性。
本文地址:https://www.jishuxx.com/zhuanli/20241125/335783.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表