一种挂轨式巡检机器人自动清洗装置的制作方法
- 国知局
- 2024-11-25 15:41:47
本技术涉及一种挂轨式巡检机器人自动清洗装置。
背景技术:
1、皮带输送机在冶金、火力发电等各行各业应用极为广泛,输煤栈桥工况下的环境煤粉浓度较大,根据以往项目经验机器人在输煤栈桥环境下使用1天,机器人机身就会积累大量粉尘,一方面会影响机器人视频红外等各类传感数据的采集,另一方面也会影响设备整体的美观。往往现有的设备维护人员需要定期对现场机器人进行清洁保养,增加了设备维护工作量。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺陷,提供一种能够实现挂轨式巡检机器人自动清洗的装置。
2、为了达到上述目的,本实用新型提供的技术方案如下:
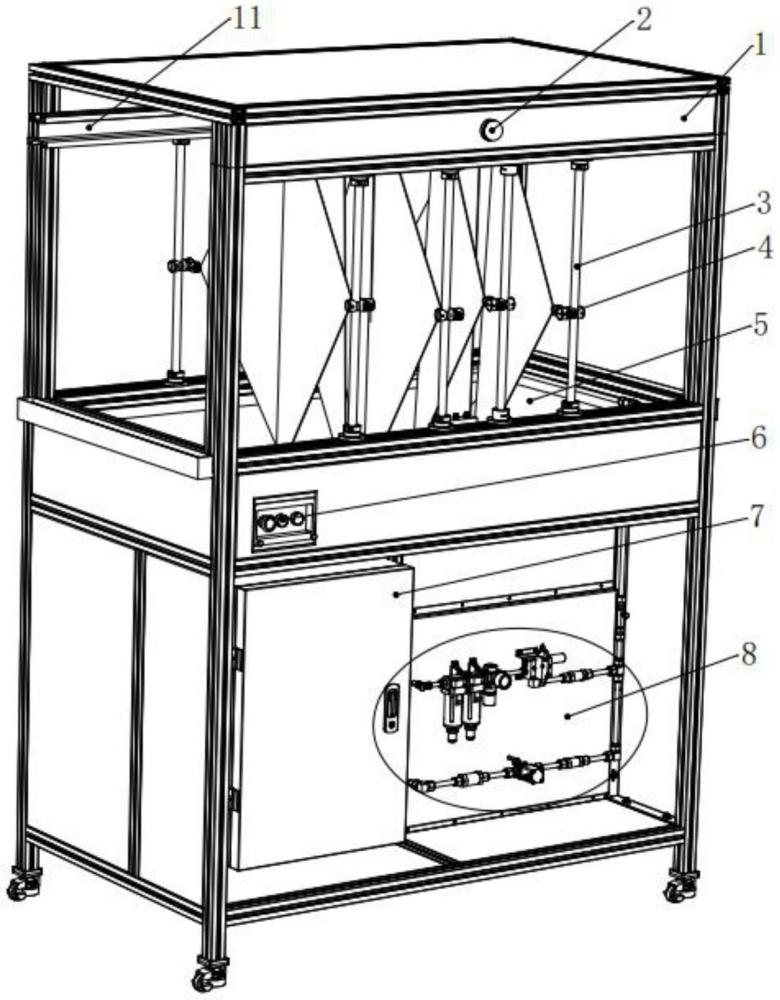
3、一种挂轨式巡检机器人自动清洗装置,该挂轨式巡检机器人自动清洗装置设于巡检机器人的末端轨道处;包括框架、导柱、方向可调的扇形喷嘴、接水槽、电控柜、水气管路;框架分为上、下两层;框架上层作为冲洗区,巡检机器人的末端轨道穿过冲洗区;电控柜与水气管路设于框架下层;导柱为多个,垂直设于框架上层、末端轨道的两侧;扇形喷嘴为多个,分别设于导柱上,并与水气管路相连;电控柜内设有plc控制系统,分别与巡检机器人和水气管路控制元件相连;接水槽设于冲洗区的底部。
4、进一步的,本实用新型挂轨式巡检机器人自动清洗装置还包括空压机和冲洗机,分别与水气管路相连提供高压气源和高压水源。
5、进一步的,水气管路包括水路管道和气路管道及公共管路;水路管道包括不锈钢过滤器、水用电磁阀、水用单向阀,冲洗机与不锈钢过滤器相连;气路管道包括气动三联件、气用电磁阀、气用单向阀,空压机与启动三联件相连;水路管道与气路管道连接至单向节流阀,经公共管路分成两路后连接冲洗区两侧的扇形喷嘴。
6、进一步的,扇形喷嘴通过万向连接件设于对应的导柱上。
7、进一步的,本实用新型挂轨式巡检机器人自动清洗装置的框架采用铝型材框架,框架上端贴在末端轨道上方,框架底部四只立柱与地面用角铁固定。
8、进一步的,导柱可沿巡检机器人轨道方向自由移动地设于框架上层冲洗区的两侧。
9、进一步的,扇形喷嘴的万向连接件通过连接件支架上下可调,设于对应导柱上。
10、进一步的,挂轨式巡检机器人自动清洗装置还包括指示灯和启停按钮;所述指示灯和启停按钮均设于框架上,且分别与plc控制系统相连。
11、进一步的,plc控制系统通过网线与挂轨式巡检机器人无线设备连通。
12、本实用新型相比现有技术具有以下优点:
13、本实用新型采用水气管路将水路和气路合并后,连通对应的多个万向扇形喷嘴,先喷水将表面机器人表面粉煤灰冲洗干净,再自动切换成吹气功能将机器人表面水渍吹落吹干。水气路共用一套管路可有效的提高喷嘴位置调节的效率,不需要像单独控制那样分开调节,繁琐。
14、同时通过plc与工业控制计算机通讯,利用工业控制计算机对机器人及冲洗装置两者实时交互,判断机器人是否进入指定位置,给冲洗装置发布冲洗指令,整个信息交互过程涉及到无线通讯传输功能的应用,对于输煤皮带机器人来说,冲洗功能又属于该设备的一个子项功能,整合到工业控制计算机控制平台上,形成一套完整的巡检体系,是展现电厂智能化工业水平的体现。
15、综上,本实用新型一种挂轨式巡检机器人自动清洗装置,调节方便,又是独立设备,方便定制,不仅能清洁机器人表面粉煤灰,提高巡检机器人设备的检测精度,还能延长设备使用寿命,采用工业控制计算机与plc进行控制,功能强大,设备可靠,应用范围广。
技术特征:1.一种挂轨式巡检机器人自动清洗装置,其特征在于,所述挂轨式巡检机器人自动清洗装置设于巡检机器人的末端轨道处;所述挂轨式巡检机器人自动清洗装置包括框架、导柱、方向可调的扇形喷嘴、接水槽、电控柜、水气管路;所述框架分为上、下两层;所述框架上层作为冲洗区,巡检机器人的末端轨道穿过冲洗区;电控柜与水气管路设于框架下层;所述导柱为多个,垂直设于框架上层、末端轨道的两侧;所述扇形喷嘴为多个,分别设于所述导柱上,并与水气管路相连;所述电控柜内设有plc控制系统,分别与巡检机器人和水气管路控制相连;所述接水槽设于冲洗区的底部。
2.根据权利要求1所述的挂轨式巡检机器人自动清洗装置,其特征在于,所述挂轨式巡检机器人自动清洗装置还包括空压机和冲洗机,分别与水气管路相连提供高压气源和高压水源。
3.根据权利要求2所述的挂轨式巡检机器人自动清洗装置,其特征在于,所述水气管路包括水路管道和气路管道及公共管路;水路管道包括不锈钢过滤器、水用电磁阀、水用单向阀,所述冲洗机与不锈钢过滤器相连;气路管道包括气动三联件、气用电磁阀、气用单向阀,所述空压机与气动三联件相连;所述水路管道与气路管道连接至单向节流阀,经公共管路分成两路后连接冲洗区两侧的扇形喷嘴。
4.根据权利要求3所述的挂轨式巡检机器人自动清洗装置,其特征在于,所述扇形喷嘴通过万向连接件设于对应的导柱上。
5.根据权利要求4所述的挂轨式巡检机器人自动清洗装置,其特征在于,所述框架采用铝型材框架,框架上端贴在末端轨道上方,框架底部四只立柱与地面用角铁固定。
6.根据权利要求5所述的挂轨式巡检机器人自动清洗装置,其特征在于,所述导柱可沿巡检机器人轨道方向自由移动地设于框架上层冲洗区的两侧。
7.根据权利要求6所述的挂轨式巡检机器人自动清洗装置,其特征在于,所述扇形喷嘴的万向连接件通过连接件支架上下可调,设于对应导柱上。
8.根据权利要求7所述的挂轨式巡检机器人自动清洗装置,其特征在于,所述挂轨式巡检机器人自动清洗装置还包括指示灯和启停按钮;所述指示灯和启停按钮均设于框架上,且分别与plc控制系统控制相连。
9.根据权利要求8所述的挂轨式巡检机器人自动清洗装置,其特征在于,所述plc控制系统通过网线与挂轨式巡检机器人无线设备连通。
技术总结本技术一种挂轨式巡检机器人自动清洗装置,该挂轨式巡检机器人自动清洗装置设于巡检机器人的末端轨道处;包括框架、导柱、方向可调的扇形喷嘴、接水槽、电控柜、水气管路;框架分为上、下两层;框架上层作为冲洗区,巡检机器人的末端轨道穿过冲洗区;电控柜与水气管路设于框架下层;导柱为多个,垂直设于框架上层、末端轨道的两侧;扇形喷嘴为多个,分别设于导柱上,并与水气管路相连;电控柜内设有PLC控制系统,分别与巡检机器人和水气管路控制相连;接水槽设于冲洗区的底部。采用本技术可有效实现挂轨式巡检机器人自动清洗。技术研发人员:程传良,雷华锦,郑磊受保护的技术使用者:南京科远智慧科技集团股份有限公司技术研发日:20240112技术公布日:2024/11/21本文地址:https://www.jishuxx.com/zhuanli/20241125/338582.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表