一种晶圆传输机械手及清洗装置的制作方法
- 国知局
- 2024-11-25 15:46:23
本技术涉及半导体制造,特别是涉及一种晶圆传输机械手及清洗装置。
背景技术:
1、现有半导体制造设备(如化学机械平坦化(chemical mechanicalplanarization,cmp)设备或减薄设备等)的晶圆清洗单元在工作过程中,通过晶圆传输机械手取放晶圆实现晶圆在各个清洗模组之间的移动,保证晶圆在各个清洗模组内完成相应的清洗工艺。
2、为了实现对晶圆传输机械手进行晶圆有无检查,需要在各个清洗模块上加装对射传感器。当晶圆传输机械手进出清洗模块时,利用对射传感器对晶圆传输机械手进行晶圆有无检查。然而,晶圆传输机械手两个清洗模块之间进行转移的过程中,超出了对射传感器的检查范围,因而此时无法对晶圆传输机械手进行晶圆有无检测。也就是说,无法对晶圆传输机械手上的晶圆进行全程监控,导致晶圆碰撞和碎片的风险较大,晶圆传输的安全性较低。
技术实现思路
1、基于此,有必要针对现有技术中无法对晶圆传输机械手上的晶圆进行全程监控,导致晶圆碰撞和碎片的风险较大,晶圆传输的安全性较低的问题,提供一种改善上述缺陷的晶圆传输机械手及清洗装置。
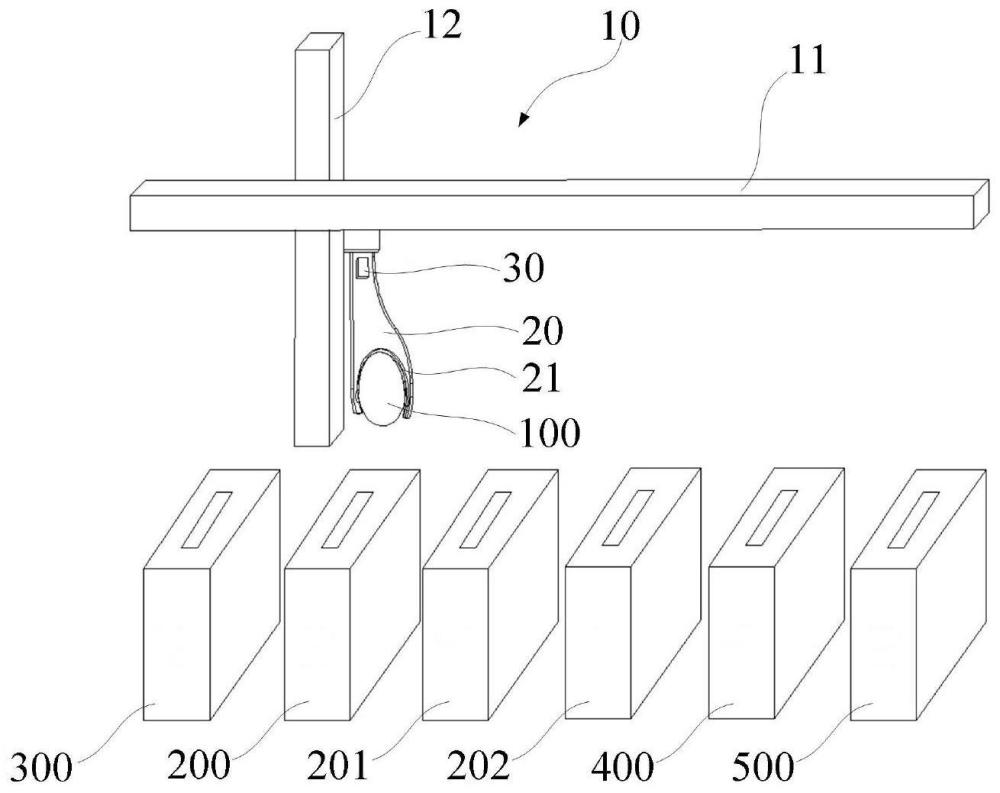
2、一种晶圆传输机械手,包括运动驱动组件及卡爪;所述卡爪安装在所述运动驱动组件的驱动端,以使所述运动驱动组件能够驱动所述卡爪移动,所述卡爪上具有用于容纳晶圆的容纳部;
3、所述晶圆传输机械手还包括设置在所述卡爪上的传感器,所述传感器用于检测预设参数,所述预设参数的值因所述容纳部容纳晶圆而产生变化。
4、在其中一个实施例中,所述传感器包括频率传感器,所述频率传感器安装在所述卡爪上,且用于检测所述卡爪在移动过程中的振动频率。
5、在其中一个实施例中,所述传感器包括拉力传感器或称重传感器,所述拉力传感器或称重传感器安装在所述运动驱动组件的驱动端与所述卡爪之间,用于检测所述卡爪和收容在所述容纳部内的晶圆的重量。
6、在其中一个实施例中,所述晶圆传输机械手还包括安装座,所述安装座连接在所述运动驱动组件的驱动端,所述卡爪通过所述拉力传感器或称重传感器连接在所述安装座上。
7、在其中一个实施例中,所述晶圆传输机械手还包括定位销,所述卡爪和所述安装座上均开设有定位孔,所述定位销穿设于所述卡爪上的所述定位孔和所述安装座上的所述定位孔。
8、在其中一个实施例中,所述定位销设置为两个,两个所述定位销分别位于所述拉力传感器或称重传感器的相对两侧。
9、在其中一个实施例中,所述运动驱动组件包括第一驱动单元和第二驱动单元,所述第二驱动单元安装在所述第一驱动单元的驱动端,以使所述第一驱动单元能够驱动所述第二驱动单元沿第一方向移动;所述卡爪设置在所述第二驱动单元的驱动端,以使所述第二驱动单元能够驱动所述卡爪沿第二方向移动;
10、其中,所述第一方向与所述第二方向相交。
11、在其中一个实施例中,所述第一方向为水平方向,所述第二方向为上下方向;或者
12、所述第一方向为上下方向,所述第二方向为水平方向。
13、在其中一个实施例中,所述晶圆传输机械手还包括控制器,所述控制器与所述传感器通讯连接,所述控制器通过所述传感器的检测结果判断所述卡爪的所述容纳部是否容纳有晶圆。
14、一种清洗装置,包括多个清洗箱及如上任一实施例中所述的晶圆传输机械手,所述运动驱动组件用于驱动所述卡爪在各个所述清洗箱之间转移,各个所述清洗箱用于对所述卡爪的所述容纳部上的晶圆进行清洗。
15、上述晶圆传输机械手及清洗装置,在实际使用时,运动驱动组件驱动卡爪利用容纳部抓取晶圆,然后驱动卡爪移动,使得卡爪的容纳部内的晶圆在各个清洗箱之间转移,进而使得卡爪的容纳部内的晶圆在各个清洗箱内完成清洗。由于卡爪上的传感器能够实时监测上述预设参数,从而根据该预设参数的值判定卡爪的容纳部内是否存在晶圆,即实现了对卡爪的容纳部内进行晶圆有无的全程监控,大大降低了晶圆发生碰撞和碎片的风险,提高了晶圆的传输安全性。
技术特征:1.一种晶圆传输机械手,其特征在于,包括运动驱动组件(10)及卡爪(20);所述卡爪(20)安装在所述运动驱动组件(10)的驱动端,以使所述运动驱动组件(10)能够驱动所述卡爪(20)移动,所述卡爪(20)上具有用于容纳晶圆(100)的容纳部(21);
2.根据权利要求1所述的晶圆传输机械手,其特征在于,所述传感器包括频率传感器(30),所述频率传感器(30)安装在所述卡爪(20)上,且用于检测所述卡爪(20)在移动过程中的振动频率。
3.根据权利要求1所述的晶圆传输机械手,其特征在于,所述传感器包括拉力传感器或称重传感器(31),所述拉力传感器或称重传感器(31)安装在所述运动驱动组件(10)的驱动端与所述卡爪(20)之间,用于检测所述卡爪(20)和收容在所述容纳部(21)内的晶圆(100)的重量。
4.根据权利要求3所述的晶圆传输机械手,其特征在于,所述晶圆传输机械手还包括安装座(13),所述安装座(13)连接在所述运动驱动组件(10)的驱动端,所述卡爪(20)通过所述拉力传感器或称重传感器(31)连接在所述安装座(13)上。
5.根据权利要求4所述的晶圆传输机械手,其特征在于,所述晶圆传输机械手还包括定位销(32),所述卡爪(20)和所述安装座(13)上均开设有定位孔,所述定位销(32)穿设于所述卡爪(20)上的所述定位孔和所述安装座(13)上的所述定位孔。
6.根据权利要求5所述的晶圆传输机械手,其特征在于,所述定位销(32)设置为两个,两个所述定位销(32)分别位于所述拉力传感器或称重传感器(31)的相对两侧。
7.根据权利要求1所述的晶圆传输机械手,其特征在于,所述运动驱动组件(10)包括第一驱动单元(11)和第二驱动单元(12),所述第二驱动单元(12)安装在所述第一驱动单元(11)的驱动端,以使所述第一驱动单元(11)能够驱动所述第二驱动单元(12)沿第一方向(x)移动;所述卡爪(20)设置在所述第二驱动单元(12)的驱动端,以使所述第二驱动单元(12)能够驱动所述卡爪(20)沿第二方向(y)移动;
8.根据权利要求7所述的晶圆传输机械手,其特征在于,所述第一方向(x)为水平方向,所述第二方向(y)为上下方向;或者
9.根据权利要求1所述的晶圆传输机械手,其特征在于,所述晶圆传输机械手还包括控制器,所述控制器与所述传感器通讯连接,所述控制器通过所述传感器的检测结果判断所述卡爪(20)的所述容纳部(21)是否容纳有晶圆(100)。
10.一种清洗装置,其特征在于,包括多个清洗箱及如权利要求1至9任一项所述的晶圆传输机械手,所述运动驱动组件(10)用于驱动所述卡爪(20)在各个所述清洗箱之间转移,各个所述清洗箱用于对所述卡爪(20)的所述容纳部(21)上的晶圆(100)进行清洗。
技术总结本技术涉及一种晶圆传输机械手及清洗装置。该晶圆传输机械手包括:运动驱动组件及卡爪;卡爪安装在运动驱动组件的驱动端,以使运动驱动组件能够驱动卡爪移动,卡爪上具有用于容纳晶圆的容纳部;晶圆传输机械手还包括设置在卡爪上的传感器,传感器用于检测预设参数,预设参数的值因容纳部容纳晶圆而产生变化。由于卡爪上的传感器能够实时监测上述预设参数,从而根据该预设参数的值判定卡爪的容纳部内是否存在晶圆,即实现了对卡爪的容纳部内进行晶圆有无的全程监控,大大降低了晶圆发生碰撞和碎片的风险,提高了晶圆的传输安全性。技术研发人员:吴俊逸,张鹏飞,张嘉诚受保护的技术使用者:吉姆西半导体科技(无锡)股份有限公司技术研发日:20240304技术公布日:2024/11/21本文地址:https://www.jishuxx.com/zhuanli/20241125/338825.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表