快速变温条件下硅光子陀螺稳定控制方法及硅光子陀螺与流程
- 国知局
- 2024-12-06 12:11:09
本发明属于光学传感,具体涉及一种快速变温条件下硅光子陀螺稳定控制方法及硅光子陀螺。
背景技术:
1、随着技术发展和领域拓展,光学陀螺逐步向着小型化、低成本方向发展,传统光纤陀螺的小型化、低成本发展面临巨大挑战。近年来,硅基集成光学芯片取得突破并且在通信领域获得广泛应用,为光学陀螺实现集成化与小型化提供了新的思路-硅光子陀螺,将传统光纤陀螺中的各分立光学器件用硅基集成收发调制芯片取代,传统光纤环圈用片上硅基谐振腔芯片取代,其体积-重量-成本-功耗等将会大幅降低,因此硅光子陀螺成为了惯性器件重要发展方向。
2、硅光子陀螺通常需要工作在较为严苛的环境中,如典型工作温度区间在-45~65℃,温度速率达到1℃/min,有些极限应用甚至达到-55~85℃,温度速率高达5℃/min,在此环境下,硅光子陀螺的稳定工作极其困难,具体分析如下:硅光子陀螺的工作基础是以激光频率对谐振腔芯片谐振频率的快速、稳定跟踪为前提,但是传统光源普遍存在很大的温度-中心频率漂移,典型温度-中心频率漂移高达ghz/℃,而谐振腔芯片的温度-谐振频率通常也高达ghz/℃,光源中心频率和谐振频率漂移的变化非对称会导致光源中心频率无法快速、稳定、实时地跟踪住硅基谐振腔的谐振频率,一旦无法稳定跟踪,则往往造成陀螺输出误差,因此传统硅光子陀螺难以适应谐振频率大变温条件下的工程应用,迫切需要一种能够在快速变温条件下实现稳定控制,确保陀螺精确输出载体转速信号的方法和装置。
技术实现思路
1、针对现有技术中陀螺在快速变温条件下易导致输出误差的技术问题,本发明提供了一种快速变温条件下硅光子陀螺稳定控制方法及硅光子陀螺,该方法通过对光源电流和温度进行自适应控制,使得光源中心频率在快速变温条件下快速跟踪谐振腔的谐振频率,实现陀螺稳定控制,提高陀螺输出精确度。
2、本发明解决上述技术问题采用的技术方案如下:
3、本发明提供了一种快速变温条件下硅光子陀螺稳定控制方法,包括如下步骤:
4、s1、设置光源频率控制数字区间,所述光源频率控制数字区间按照频率由低到高依次包括温度下闭环区间、驱动电流线性闭环区间、温度上闭环区间;
5、s2、判断光源中心频率是否进入谐振谷,若进入谐振谷中,记录此时温度为光源初始温度,否则控制光源温度以温度下闭环区间的上工作极值点为基础进行线形累加,直至光源中心频率进入谐振谷,记录此时温度为光源初始温度;
6、s3、采集光源进入谐振腔后输出的cw谐振信号、ccw谐振信号,计算顺、逆时针谐振频率与光源中心频率偏差之和d和;
7、s4、若d和位于驱动电流线性闭环区间,则根据d和反馈控制光源电流;若d和位于温度上闭环区间,则根据d和调节光源温度,使得d和位于驱动电流线性闭环区间;若d和位于温度下闭环区间,则根据d和调节光源温度,使得d和位于驱动电流线性闭环区间。
8、进一步地,所述步骤s1中,所述驱动电流线性闭环区间的设置方法如下:
9、计算驱动电流线性闭环区间对应的频率调谐范围为:
10、
11、其中,vdac1为电流控制dac的满量程控制电压,k压控电流源为压控电流源的传递系数,k电流-频率为光源电流-频率调谐系数,di_max、di_min分别为电流线性闭环区间的上、下工作极值点,a为电流控制dac的位数;
12、依据f电流至少覆盖1次谐振腔的完整谐振谷,确定di_max、di_min取值;
13、所述温度下闭环区间、温度上闭环区间的设置方法如下:
14、根据所述温度上闭环区间的下工作极值点与所述驱动电流线性闭环区间的上工作极值点对应的频率相同,所述温度下闭环区间的上工作极值点与所述驱动电流线性闭环区间的下工作极值点对应的频率相同,计算温度下闭环区间、温度上闭环区间的上、下工作极值点:
15、
16、
17、其中,dt_max、dt_min分别为温度下闭环区间、温度上闭环区间的下、上工作极值点,vdac2为温度控制dac的满量程控制电压,k温度-频率为光源温度-频率调谐系数,b为电温度控制dac的位数。
18、进一步地,所述di_max、di_min取值使得温度下闭环区间、温度上闭环区间关于驱动电流线性闭环区间上下对称。采用该种配置方式,可以快速设定光源频率控制数字区间,优化光源温度和电流控制速率。
19、进一步地,所述步骤s4具体包括如下步骤:
20、若di_min<d和<di_max,则光源电流为:
21、
22、其中,i0为光源初始设定电流,vdac1为电流控制dac的满量程控制电压,k压控电流源为压控电流源的传递系数,k电流-频率为光源电流-频率调谐系数,di_max、di_min分别为电流线性闭环区间的上、下工作极值点,a为电流控制dac的位数;
23、若d和≥di_max,则光源温度为:
24、
25、若d和≤di_min,则光源温度为:
26、
27、其中,t0为进入谐振谷时的光源初始温度,vdac2为温度控制dac的满量程控制电压,k温度-频率为光源温度-频率调谐系数,b为电温度控制dac的位数;
28、通过光源温度调节,使得d和位于驱动电流线性闭环区间,进行电流闭环控制。
29、进一步地,所述步骤s2前还包括陀螺上电、复位信号判断的步骤,所述复位信号若置高,则清空陀螺寄存器中的cw谐振信号、ccw谐振信号;
30、所述光源初始设定电流为驱动电流线性闭环区间的中间值。
31、进一步地,所述硅光子陀螺稳定控制方法,还包括频率补偿、强度补偿的步骤:
32、s5、给调制器施加调制方波信号,解调光源通过谐振腔的干涉信号,输出补偿前陀螺转速;
33、s6、计算频率补偿参数,包括
34、电流-频率补偿系数ci-f:
35、
36、温度-频率补偿系数ct-f:
37、
38、其中,a为谐振腔面积,k电流_频率为光源的电流-频率调谐系数,n为谐振腔折射率,λ为谐振腔光波长,l为谐振腔腔长,k温度_频率为光源的温度-频率调谐系数;
39、s7、频率补偿后的陀螺转速为:
40、d转速_f补偿=d转速_补偿前+ici_f+tct_f
41、其中,d转速_补偿前为频率补偿前的陀螺转速,i为当前电流,t为当前温度;
42、s8、计算强度补偿参数,包括
43、电流-强度补偿系数ci-i:
44、
45、温度-强度补偿系数ct-i:
46、
47、其中,k电流_强度为光源电流-强度调谐系数,αc为连接谐振腔的耦合器损耗,αl为谐振腔损耗,ε为连接谐振腔的两个耦合器的分光比,fsr为谐振腔的自由谱线宽度,f为光源中心频率,j为虚数单位,k温度_强度为光源温度-强度调谐系数;
48、s9、强度补偿后的陀螺转速为:
49、d转速_i补偿=d转速_f补偿+ici_i+tct_i
50、其中,d转速_i补偿为频率补偿后的陀螺转速。
51、本发明还提供了一种快速变温条件下硅光子陀螺,包括:
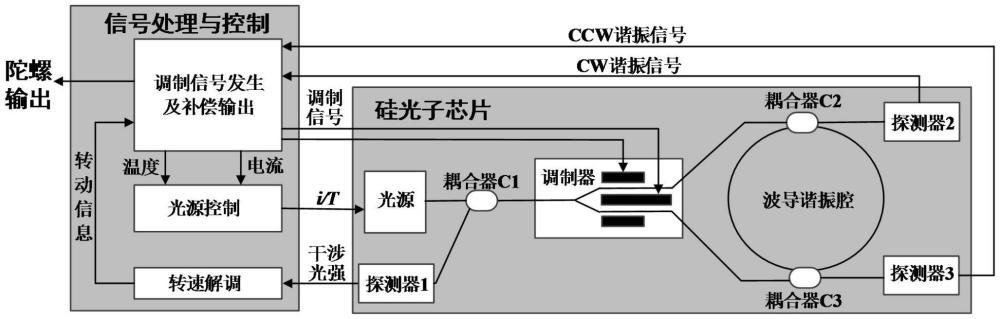
52、光路模块,所述光路模块包括光源、探测器pd1、探测器pd2、探测器pd3、耦合器c1、耦合器c2、耦合器c3、调制器、谐振腔,所述光源输出光至耦合器c1端口a,所述耦合器c1端口b、c分别连接探测器pd1和调制器输入端口,所述调制器两个输出端口分别连接耦合器c2、耦合器c3的端口a,所述耦合器c2、耦合器c3的端口b分别连接探测器pd2、探测器pd3,所述耦合器c2、耦合器c3的端口c、d分别连接谐振腔的上下两组输入输出端口,所述探测器pd1探测通过谐振腔滤波后的双光束干涉信号,所述探测器pd2、探测器pd3探测谐振腔的透射cw、ccw谐振信号;
53、电路,所述电路用于硅光子陀螺的信号处理与控制,包括调制信号发生及补偿输出模块、转速解调模块、光源控制模块;
54、所述调制信号发生及补偿输出模块用于生成调制信号,解调cw、ccw谐振信号,计算光源中心频率与两个谐振信号的频率差之和,及计算光源反馈控制的电流、温度;
55、所述光源控制模块根据光源反馈控制的电流、温度信息调节光源电流、温度;
56、所述转速解调模块,用于接收双光束干涉信号,解调生成陀螺转速。
57、进一步地,所述调制信号发生及补偿输出模块还用于对解算的陀螺转速进行频率补偿、强度补偿计算。
58、进一步地,所述光源为宽谱光源。
59、本发明与现有技术相比的有益效果:
60、本发明提出一种基于光源电流/温度自适应控制的硅光子陀螺稳定控制方法,通过硅光子芯片上集成的双探测器实现cw谐振信号、ccw谐振信号检测,实现频率和强度检测,以此为输入,在硅光子陀螺的闭环控制环节中引入控制边界检测算法,实现快速变温条件下的稳定控制,兼顾电流控制的高精度优势和温度控制的大范围特点,能够适用于快速变温条件下的频率精确、稳定控制,抑制温度变化引入的陀螺输出误差。
61、本发明通过温度和电流的双参量控制,有效跟踪光源中心频率到cw谐振腔谐振频率和ccw谐振腔谐振频率正中间锁定频率差之和,可以避免对单通道谐振腔谐振频率锁定引入的误差。
62、本发明通过在光路结构中引入双耦合透射谐振腔,并基于宽谱谐振方案,实现传统谐振陀螺中相干噪声的有效抑制。
63、本发明补偿算法中集成了频率补偿和强度补偿方法,分别以cw谐振信号和ccw谐振信号为输入,得到频率补偿参量和强度补偿参量,通过两种补偿方式相结合,有效抑制宽谱光源调谐过程中引入的强度型和频率型误差。
64、本发明频率补偿、强度补偿采用基于谐振腔特征参数计算的补偿公式,相较于传统建模补偿方案具有算法简单、模型准确的技术特点,有利于提升补偿准确性,提升响应速度,提升硅光子陀螺精度的同时保证其带宽。
本文地址:https://www.jishuxx.com/zhuanli/20241204/339838.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表