一种焊缝咬边缺陷检测方法、系统、电子设备及存储介质
- 国知局
- 2024-12-06 12:13:22
本公开的实施例属于焊缝咬边缺陷检测,具体涉及一种焊缝咬边缺陷检测方法、系统、电子设备及存储介质。
背景技术:
1、金属焊缝表面缺陷的正确检出,是确保工件安全地被使用的前提。其中,咬边缺陷指的是焊接接头边缘出现不规则、锯齿状或凹凸不平的情况。咬边的存在会影响焊接接头的外观和尺寸精度,同时也可能降低焊接接头的强度和密封性,从而对工业应用造成安全隐患,因此必须对焊缝进行缺陷检测。
2、工程实际中的焊缝咬边检测,主要还是依靠人工检验,而依靠检验人员的个人经验、技能加上主观判断,容易造成错检、漏检等问题。目前,国内外学者在焊缝咬边缺陷检测领域展开了一定的研究。蒋美仙等提出了基于deeplab-v3与三维点云数据的焊缝缺陷检测,利用循环一致性对抗网络对样本数据进行扩充,能够检测出咬边、气孔等表面缺陷;贾瑞等提出了基于线结构光的角焊缝外观检测算法,用法向平均法来提取结构光条纹中心线;张天宇等提出了基于结构光的焊缝表面质量检测算法,采用随机采样一致性算法拟合平面分割焊缝点云,通过点云切片获取焊缝轮廓线,但是当焊缝点云为多平面时,平面拟合结果较差,准确率低;yuan li等提出了基于激光条纹的焊道轮廓提取方法,该方法对于其他焊接接头方式并不适用。
3、基于结构光的咬边特征提取方法存在相应的局限性,成本较高的同时仅能够处理角焊缝或者平面焊缝,对于多平面焊缝特征提取的适应性较差。焊缝咬边缺陷在底片的焊缝边缘处,靠母材侧呈现出粗短的黑色条状影像,黑度不均匀,轮廓不明显,形状不规则,仅采用2d机器视觉技术无法准确识别与定位。
技术实现思路
1、本公开的实施例旨在至少解决现有技术中存在的技术问题之一,提供一种焊缝咬边缺陷检测方法、系统、电子设备及存储介质。
2、本公开的一个方面提供一种焊缝咬边缺陷检测方法,所述方
3、法包括:
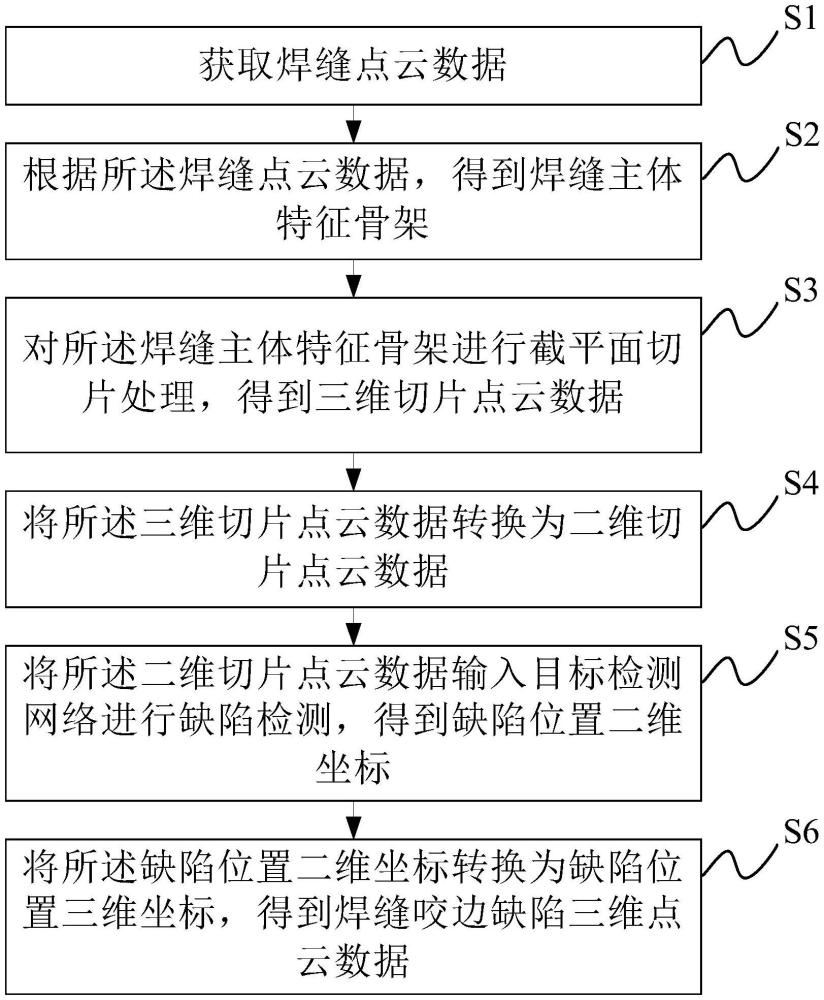
4、获取焊缝点云数据;
5、根据所述焊缝点云数据,得到焊缝主体特征骨架;
6、对所述焊缝主体特征骨架进行截平面切片处理,得到三维切片点云数据;
7、将所述三维切片点云数据转换为二维切片点云数据;
8、将所述二维切片点云数据输入目标检测网络进行缺陷检测,得到缺陷位置二维坐标;
9、将所述缺陷位置二维坐标转换为缺陷位置三维坐标,得到焊缝咬边缺陷三维点云数据。
10、可选的,所述根据所述焊缝点云数据,得到焊缝主体特征骨架,包括:
11、依次采用八叉树分割和体素滤波降采样对所述焊缝点云数据进行预处理;
12、依次对所述焊缝点云数据进行随机采样和wlop算子重采样;
13、通过局部中值迭代对所述焊缝点云数据进行收缩,得到特征骨架点;
14、对所述特征骨架点进行骨架连接和平滑处理,得到焊缝主体特征骨架。
15、可选的,所述对所述特征骨架点进行骨架连接,包括:
16、根据各骨架点的线性程度确定可选骨架点;
17、将具有最大线性程度的可选骨架点作为起点,连接多个近邻的可选骨架点。
18、可选的,所述对所述焊缝主体特征骨架进行截平面切片处理,得到三维切片点云数据,包括:
19、分别对所述焊缝主体特征骨架的每一段点云区间进行等间距切片。
20、可选的,所述将所述三维切片点云数据转换为二维切片点云数据,包括:
21、将各所述三维切片点云投影到二维平面;
22、将各所述三维切片点云的三维坐标系转换为二维坐标系,得到二维切片点云;
23、将所述二维切片点云转化为二维图像。
24、可选的,所述目标检测网络预先通过如下步骤训练得到:
25、获取焊缝轮廓线图像集;
26、对所述图像集中的各焊缝轮廓线图像进行咬边缺陷标注;
27、将具有标注的所述焊缝轮廓线图像集作为训练集对rt-detr检测网络进行训练,得到目标检测网络。
28、可选的,所述将所述缺陷位置二维坐标转换为缺陷位置三维坐标,得到焊缝咬边缺陷三维点云数据,包括:
29、设置焊缝咬边缺陷的三维点云检测框的坐标;
30、通过旋转矩阵将所述三维点云检测框的坐标还原到焊缝点云所在区域,得到焊缝咬边缺陷在焊缝点云上的显示。
31、本公开的另一方面提供一种焊缝咬边缺陷检测系统,所述系统包括:
32、获取模块,用于获取焊缝点云数据;
33、特征骨架模块,用于根据所述焊缝点云数据,得到焊缝主体特征骨架;
34、切片模块,用于对所述焊缝主体特征骨架进行截平面切片处理,得到三维切片点云数据;
35、数据转换模块,用于将所述三维切片点云数据转换为二维切片点云数据;
36、检测模块,用于将所述二维切片点云数据输入目标检测网络进行缺陷检测,得到缺陷位置二维坐标;
37、坐标模块,用于将所述缺陷位置二维坐标转换为缺陷位置三维坐标,得到焊缝咬边缺陷三维点云数据。
38、本公开的又一方面提供一种电子设备,包括:
39、至少一个处理器;以及,与所述至少一个处理器通信连接的存储器,用于存储一个或多个程序,当所述一个或多个程序被所述至少一个处理器执行时,能使得所述至少一个处理器实现上文所述的焊缝咬边缺陷检测方法。
40、本公开的再一方面提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现上文所述的焊缝咬边缺陷检测方法。
41、本公开实施例的一种焊缝咬边缺陷检测方法、系统、电子设备及存储介质,通过基于点云的焊缝骨架提取算法,将点云数据转换为二维切片,对切片进行缺陷检测并将缺陷位置还原到点云图中,提高了缺陷与母材颜色相近、轮廓不明显、形状不规则等情况下的缺陷识别的准确率,解决了仅靠2d机器视觉技术难以识别与定位缺陷的问题。
技术特征:1.一种焊缝咬边缺陷检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述焊缝点云数据,得到焊缝主体特征骨架,包括:
3.根据权利要求2所述的方法,其特征在于,所述对所述特征骨架点进行骨架连接,包括:
4.根据权利要求1所述的方法,其特征在于,所述对所述焊缝主体特征骨架进行截平面切片处理,得到三维切片点云数据,包括:
5.根据权利要求1所述的方法,其特征在于,所述将所述三维切片点云数据转换为二维切片点云数据,包括:
6.根据权利要求1所述的方法,其特征在于,所述目标检测网络预先通过如下步骤训练得到:
7.根据权利要求1所述的方法,其特征在于,所述将所述缺陷位置二维坐标转换为缺陷位置三维坐标,得到焊缝咬边缺陷三维点云数据,包括:
8.一种焊缝咬边缺陷检测系统,其特征在于,所述系统包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的焊缝咬边缺陷检测方法。
技术总结本公开的实施例提供一种焊缝咬边缺陷检测方法、系统、电子设备及存储介质。方法包括:获取焊缝点云数据;根据焊缝点云数据,得到焊缝主体特征骨架;对焊缝主体特征骨架进行截平面切片处理,得到三维切片点云数据;将三维切片点云数据转换为二维切片点云数据;将二维切片点云数据输入目标检测网络进行缺陷检测,得到缺陷位置二维坐标;将缺陷位置二维坐标转换为缺陷位置三维坐标,得到焊缝咬边缺陷三维点云数据。本公开的实施例将点云数据转换为二维切片进行缺陷检测,并将缺陷位置还原到点云图中,提高了识别准确率,解决了二维难以识别与定位的问题。技术研发人员:龚烨飞,严超,何榕程,王萌,王文杰,谢雨欣,章军辉受保护的技术使用者:常熟理工学院技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/340041.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表