基于空间残差的水下目标检测方法
- 国知局
- 2024-12-06 12:17:05
本发明涉及水下目标检测,具体而言,尤其涉及一种基于空间残差的水下目标检测方法。
背景技术:
1、水下目标检测作为水下视觉感知的中枢神经,正逐步赋能于海洋探索领域,极大地提升了在复杂水下环境中对物体进行高精度识别与定位的能力。与陆上环境不同,水下成像同时受到多种退化因素的影响,它们如同无形之手,扭曲图像的本质特性,破坏了图像的统计和结构信息,遮蔽真实数据的特征信息,影响人眼的视觉感知和计算机的模式识别效率。为了克服水下环境对水下目标检测准确性的负面影响,研究人员致力于开发各种技术和方法,旨在使水下目标检测系统更能够在复杂的水下环境中精确地识别和定位目标。
技术实现思路
1、根据上述提出的技术问题,提出了一种基于空间残差的目标检测方法。本发明主要采用一种空间残差的思想,通过将图像特征进行分组调制,对水下图像存在的若干退化因素进行准确提取。针对现有目标检测方法忽视水下图像降质分布的异质性,对多种类型的图像退化使用统一的数据容量,本发明提出了利用空间残差思想分组估计图像的特征映射关系以处理情况的退化问题,最后基于真实场景水下数据集进行训练、推理,获取准确的水下目标定位信息。
2、本发明采用的技术手段如下:
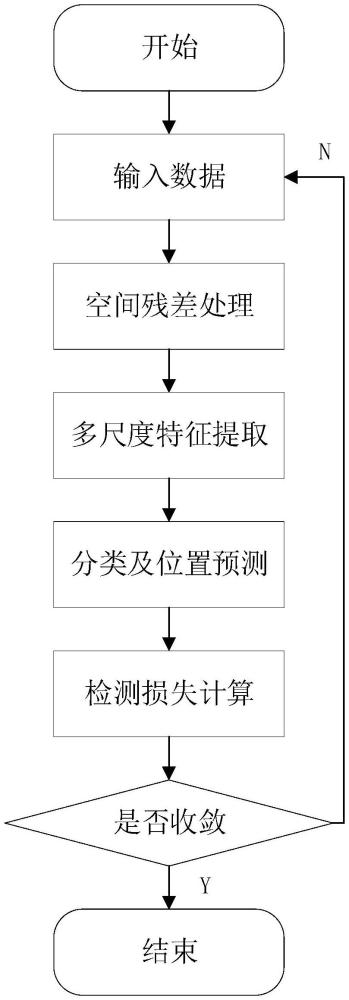
3、一种基于空间残差的水下目标检测方法,包括以下步骤:
4、s01:获取水下低质目标检测数据集,按照一定比例将所述水下低质目标检测数据集随机划分为训练集、验证集和测试集;
5、s02:根据空间残差构成骨干网络,将所述训练集中的水下低质图像作为输入,提取所述水下低质图像的多尺度特征图;所述多尺度特征图包括:高分辨率特征图、中分辨率特征图以及低分辨率特征图;
6、s03:将所述s02提取到的多尺度特征图输入e-fpn网络,进行深层特征融合获取特征信息输出;所述e-fpn网络包括:自底向上特征聚合路径以及自顶向下特征解析和特征信息输出;
7、s04:通过所述s03提取后的特征信息输出,通过检测头部网络获取映射分类与定位信息;所述分类与定位信息包括:目标分类信息以及目标定位框坐标信息;
8、s05:根据s04所述分类与定位信息计算损失,等待损失收敛,则完成目标检测模型训练;
9、s06:通过所述s05中的训练好的目标检测模型对图像进行推理,输出并绘制检测结果。
10、进一步地,所述s02中,空间残差包括特征分组提取以及信息重新连接操作,特征分组提取的计算方法为:
11、x1,x2=split(conv(fin));
12、x21,x22=split(conv(x2));
13、x3=conv(x22);
14、其中,conv表示卷积操作,split表示将特征图在通道维度分组,fin表示输入特征图,x1、x2表示第一次分组后的特征图,x21,x22表示第二次分组后的特征图,x3表示经过特征分组提取操作后的特征图;
15、信息重新连接的计算方法为:
16、y=conv(concat(x1,x21,x3));
17、其中,concat表示将特征图在通道维度进行重新连接,y表示空间残差的输出。
18、进一步地,所述骨干网络,由五个空间残差顺序连接组成,用于提取图像中的深层次特征,计算方法为:
19、fin1,fin2,fin3=backbone(f);
20、其中,f表示水下低质图像,backbone表示空间残差组成的骨干网络,fin1表示低分辨率特征图,fin2表示中分辨率特征图,fin3表示高分辨率特征图。
21、进一步地,所述e-fpn网络底向上特征聚合的计算方法为:
22、t0=upsample(fin1);
23、t1=concat(t0,fin2);
24、t2=csp(concat(upsample(csp(t1)),fin3));
25、其中,upsample表示对特征图进行上采样操作,concat表示对特征图在通道维度上进行连接,csp表示通过csplayer层对特征图进行特征提取,fin1、fin2和fin3表示经过骨干网络输出的不同尺度特征图;
26、所述e-fpn网络自顶向下特征解析和特征输出的计算方法为:
27、fout1=t2;
28、fout2=csp(concat(sr(fout1),t1));
29、fout3=csp(concat(sr(fout2),t0));
30、其中,sr表示对特征图进行尺寸调整,t0、t1和t2均表示e-fpn网络底向上特征聚合的多尺度特征图输出,fout1、fout2和fout3表示e-fpn网络最终输出的不同尺寸特征图。
31、进一步地,所述csp的特征提取计算公式为:
32、s1=conv(input);
33、s2=bottleneck(conv(input));
34、output=conv(concat(s1,s2));
35、其中,bottleneck表示残差结构中的基本块,input表示输入特征图,s1、s2表示中间状态特征图,output表示csp的输出。
36、进一步地,所述目标分类信息为预测框中预测物体类别的概率值,计算方法为:
37、numcls=softmax(x);
38、其中,softmax表示归一化操作,numcls表示目标分类信息的概率值,x表示检测头网络学习到的类别特征;
39、所述目标定位框坐标信息表示为:
40、(x,y,width,hight);
41、其中,x和y表示预测框中心相对于特征图左上角的坐标值,width和hight分别表示预测框的宽高和特征图宽高的比值。
42、进一步地,所述损失函数的计算方法为:
43、lobj=bceloss=-(y*logp+(1-y)*log(1-p));
44、lcls=bceloss;
45、lbox=iouloss=1-iou;
46、loss=λobj*lobj+λbox*lbox+λcls*lcls;
47、其中,y表示真实标签,p表示网络预测的概率,表示表示预测框和真实框的交并比,λobj、λbox和λcls均表示权重系数,lobj表示检测目标与真实值之间的损失,lbox表示检测框与真实值之间的损失,lcls表示检测类别与真实值之间的损失。
48、进一步地,所述一定比例为8:1:1。
49、较现有技术相比,本发明具有以下优点:
50、本发明为了解决特征漂移导致水下目标检测技术精度下降问题,提出一种对优化求解空间的空间残差块,其使用skipcut为pdes构建有效的边界约束,使同层次特征在合适数据容量中求解,其被实例化为适用于复杂特征场景的新型通用骨干网络架构,称为空间残差目标检测网络(bsr5)。
51、本发明提供一种空间残差块衍生的skipcut机制,从信息流的顺序角度,skipcut机制优化了通道次序的使用,为不同层次的特征匹配最合适的参数路径,确保每类特征都能在最优参数区间处理,使网络解空间更加平滑。从梯度流的逆序角度,skip cut作为反向传播过程中的快捷通路,能够将梯度传递到多个网络层,突破链式传递的限制,促进梯度的合理分配。
本文地址:https://www.jishuxx.com/zhuanli/20241204/340438.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。