一种智能校徽的自动控制方法及系统与流程
- 国知局
- 2024-12-06 12:25:03
本发明属于物联网领域,涉及传感器技术,具体是一种智能校徽的自动控制方法及系统。
背景技术:
1、现有的智能校徽自控控制方法在进行自动控制时存在以下缺陷:
2、1、通常依靠陀螺仪获取单一的摆动幅度数据来对学生进行专注力监测,存在监测结果准确性差的问题;
3、2、在进行专注力监测时,不能结合学生自身的行为习惯和生理数据进行监测,由此导致监测过程缺乏针对性。
4、为此,我们提出一种智能校徽的自动控制方法及系统。
技术实现思路
1、针对现有技术存在的不足,本发明目的是提供一种智能校徽的自动控制方法及系统,本发明基于获取学校课程时间表,根据学校课程时间表划分多个校徽控制周期,并随机选取一个校徽控制样本周期,将目标控制对象在校徽控制样本周期之前的校徽控制周期作为历史校徽控制周期,通过对多个历史校徽控制周期进行校徽位置分析,得到校徽位置控制坐标系,并将校徽控制样本周期和校徽位置控制坐标系定义为坐标系数据,将校徽控制样本周期划分为多个位置监测时段,将当前时刻对应的位置监测时段标记为实时位置监测时段,通过校徽位置控制坐标系对每一个位置监测时段的校徽移动系数进行获取,得到多个校徽移动系数,并将实时位置监测时段对应的校徽移动系数命名为实时校徽移动系数,将多个校徽移动系数和实时校徽移动系数定义为校徽位置移动数据,分别获取第一校徽移动系数阈值和第二校徽移动系数阈值,并将实时校徽移动系数与第一校徽移动系数阈值和第二校徽移动系数阈值进行数值比对,根据数值比对结果智能校徽进行实时控制,根据校徽自动控制数据和校徽位置移动数据对处于校徽控制样本周期的目标控制对象进行专注性评估;
2、为了实现上述目的,本发明采用了如下技术方案:一种智能校徽的自动控制方法包括具体以下步骤:一种智能校徽的自动控制方法,其特征在于,包括:
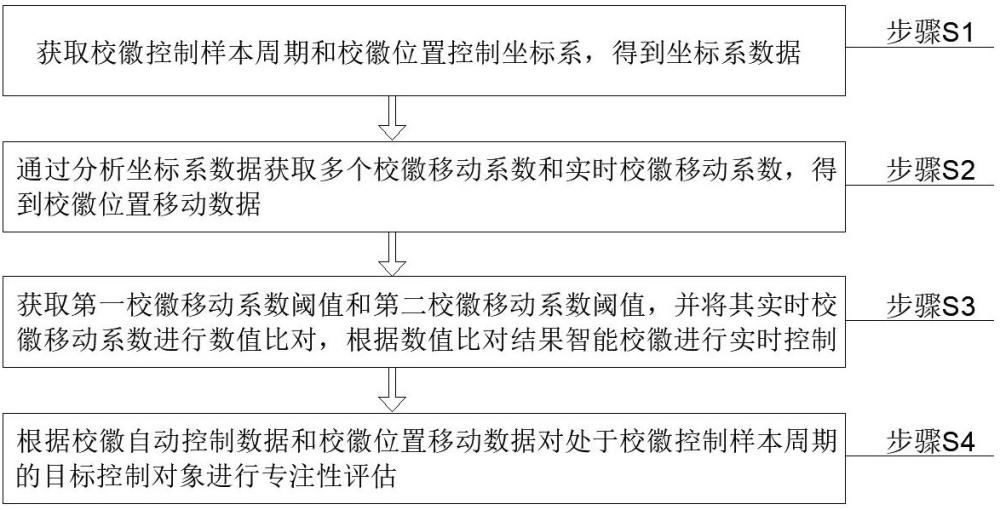
3、步骤s1:获取学校课程时间表,根据学校课程时间表划分多个校徽控制周期,并随机选取一个校徽控制样本周期,将目标控制对象在校徽控制样本周期之前的校徽控制周期作为历史校徽控制周期,通过对多个历史校徽控制周期进行校徽位置分析,得到校徽位置控制坐标系,并将校徽控制样本周期和校徽位置控制坐标系定义为坐标系数据;
4、步骤s2:将校徽控制样本周期划分为多个位置监测时段,将当前时刻对应的位置监测时段标记为实时位置监测时段,通过校徽位置控制坐标系对每一个位置监测时段的校徽移动系数进行获取,得到多个校徽移动系数,并将实时位置监测时段对应的校徽移动系数命名为实时校徽移动系数,将多个校徽移动系数和实时校徽移动系数定义为校徽位置移动数据;
5、步骤s3:分别获取第一校徽移动系数阈值和第二校徽移动系数阈值,并将实时校徽移动系数与第一校徽移动系数阈值和第二校徽移动系数阈值进行数值比对,根据数值比对结果智能校徽进行实时控制;
6、步骤s4:根据校徽自动控制数据和校徽位置移动数据对处于校徽控制样本周期的目标控制对象进行专注性评估。
7、进一步地,所述步骤s1中,还包括具体以下步骤:
8、步骤s11:获取学校课程时间表,将学校课程时间表中的每一节课程对应的课程开始时间点作为周期开始时间点,将每一节课程对应的课程结束时间点作为周期结束时间点,将周期开始时间点至周期结束时间点之间的时段作为一个校徽控制周期,得到多个校徽控制周期,且在每一个校徽监控周期内,智能校徽在周期开始时间点自动开机,智能校徽在周期结束时间点自动关机;
9、步骤s12:在多个校徽控制周期内,随机选取一个校徽控制周期作为校徽控制样本周期,并将在校徽控制样本周期内佩戴智能校徽的学生中随机选取一个学生作为目标控制对象;
10、步骤s13:建立目标控制对象在校徽控制样本周期对应的位置监测坐标系;
11、步骤s14:将校徽控制样本周期和校徽位置控制坐标系定义为坐标系数据。
12、进一步地,所述步骤s13中,还包括具体以下步骤:
13、步骤s131:获取校徽控制样本周期开始时间点之前的多个校徽控制周期作为历史校徽控制周期,得到多个历史校徽控制周期,在多个历史校徽控制周期内随机选取一个历史校徽控制周期作为特征校徽控制周期;
14、步骤s132:对特征校徽控制周期进行校徽位置分析,得到特征校徽控制周期对应的校徽活动中心点;
15、步骤s133:将校徽活动中心点作为坐标原点,将坐标原点所处的水平平面命名为第一校徽活动平面,将坐标原点所处的垂直平面命名为第二校徽活动平面;
16、步骤s134:在第一校徽活动平面内,过坐标原点任意作一条直线,得到坐标x轴,在第一校徽活动平面内,作垂直于坐标x轴的直线,得到坐标z轴,在第二校徽活动平面内,作垂直于坐标x轴的直线,得到坐标y轴,将坐标x轴、坐标y轴、坐标z轴以及坐标原点组成的空间坐标系命名为校徽位置控制坐标系。
17、进一步地,所述步骤s132中,还包括具体以下步骤:
18、步骤s1321:在特征校徽控制周期内,标记若干个位置时间点,通过位置传感器分别获取智能校徽在每一个位置时间点对应的校徽位置点,得到多个校徽位置点;
19、步骤s1322:在多个校徽位置点所处的密闭空间标记为第一特征三维空间,将第一特征三维空间划分为体积为特征空间体积的若干个矩形三维子空间;
20、步骤s1323:统计每一个矩形三维子空间所包含的校徽位置点数量值,得到多个校徽位置点数量值;
21、步骤s1324:将校徽位置点数量值进行数值大小比较,将数值最大的校徽位置点数量值对应的矩形三维子空间标记为第一中心三维子空间,在第一中心三维子空间中任意连接两条空间对角线,得到第一空间对角线和第二空间对角线;
22、步骤s1325:将第一空间对角线和第二空间对角线的交点标记为特征校徽控制周期对应的周期校徽活动中心点;
23、步骤s1326:分别对历史校徽控制周期对应的周期校徽活动中心点进行获取,得到多个周期校徽活动中心点;
24、步骤s1327:在多个周期校徽活动中心点所处的密闭空间标记为第二特征三维空间,将第二特征三维空间划分为体积为特征空间体积的若干个矩形三维子空间;
25、步骤s1328:统计每一个矩形三维子空间所包含的周期校徽活动中心点数量值,得到多个周期校徽活动中心点数量值;
26、步骤s1329:将周期校徽活动中心点数量值进行数值大小比较,将数值最大的周期校徽活动中心点数量值对应的矩形三维子空间标记为第二中心三维子空间,在第二中心三维子空间中任意连接两条空间对角线,得到第三空间对角线和第四空间对角线,将第三空间对角线和第四空间对角线的交点标记为校徽活动中心点。
27、进一步地,所述步骤s2中,还包括具体以下步骤:
28、步骤s21:获取坐标系数据,根据坐标系数据获取校徽控制样本周期和校徽位置控制坐标系;
29、步骤s22:在校徽控制样本周期内,将当前时刻对应的时间数值作为时段结束时间数值,将时段结束时间数值之前一个特征控制时长对应的时间数值标记为时段开始时间数值,将时段开始时间数值与时段结束时间数值之间的时段标记为位置监测时段,随着当前时刻对应的时间数值的改变,得到多个位置监测时段;
30、步骤s23:在多个位置监测时段中,将当前时刻所处的位置监测时段标记为实时位置监测时段,对处于实时位置监测时段的智能校徽进行位置监测,得到实时位置监测时段对应的校徽移动系数;
31、步骤s24:将组合点位移稳定性系数、组合点位移累计值以及组合点平均位移通过计算得到实时位置监测时段对应的校徽移动系数,并将其命名为实时校徽移动系数;
32、对校徽移动系数进行计算,具体公式如下:
33、;
34、其中,xhy为校徽移动系数,ljy为组合点位移累计值,wyp为组合点平均位移,wwx为组合点位移稳定性系数;
35、步骤s25:分别对位置监测时段对应的校徽移动系数进行获取,得到多个校徽移动系数;
36、步骤s26:将多个校徽移动系数和实时校徽移动系数定义为校徽位置移动数据。
37、进一步地,所述步骤s23中,还包括具体以下步骤:
38、步骤s231:在实时位置监测时段分别标记c个时间间隔相同的位置监测时间点,并将连续的两个位置监测时间点标记为一个监测时间组合点,得到第一监测时间组合点至第c/2监测时间组合点;
39、步骤s232:根据校徽位置控制坐标系获取智能校徽在第一监测时间组合点的位移数值,得到第一组合点位移;
40、步骤s233:分别对第二监测时间组合点至第c/2监测时间组合点对应的位移数值进行获取,得到第二组合点位移至第c/2组合点位移;
41、步骤s234:将第一组合点位移至第c/2组合点位移进行求和,得到组合点位移累计值;
42、步骤s235:将第一组合点位移至第c/2组合点位移进行平均值计算,得到组合点平均位移;
43、步骤s236:将第一组合点位移至第c/2组合点位移通过计算得到组合点位移稳定性系数;
44、对组合点位移稳定性系数进行计算,具体公式如下:
45、;
46、其中,wwx为组合点位移稳定性系数,wy1至wy(c/2)分别为第一组合点位移至第c/2组合点位移,wyp为组合点平均位移,c/2为组合点对应的数量值;
47、所述步骤s232中,还包括具体以下步骤:
48、步骤s2321:将第一监测时间组合点中两个位置监测时间点进行数值大小比对,将时间数值较小的位置监测时间点命名为第一位置监测时间点,将时间数值较大的位置监测时间点命名为第二位置监测时间点;
49、步骤s2322:分别获取智能校徽在第一位置监测时间点和第二位置监测时间点在校徽位置控制坐标系中的三维坐标,得到第一位置三维坐标和第二位置三维坐标;
50、步骤s2323:将第一位置三维坐标和第二位置三维坐标通过计算得到第一组合点位移;
51、对第一组合点位移进行计算,具体公式如下:
52、;
53、其中,zwy1为第一组合点位移,(x1,y1,z1)为第一位置三维坐标,(x2,y2,z2)为第二位置三维坐标。
54、进一步地,所述步骤s3中,还包括具体以下步骤:
55、步骤s31:获取校徽位置移动数据,根据校徽位置移动数据获取实时校徽移动系数;
56、步骤s32:获取第一校徽移动系数阈值和第二校徽移动系数阈值;
57、步骤s33:将实时校徽移动系数分别与第一校徽移动系数阈值和第二校徽移动系数阈值进行数值比对,并根据数值比对结果对智能校徽进行自动控制;
58、步骤s34:将多个基准样本时间段、第一校徽移动系数阈值以及第二校徽移动系数阈值定义为校徽自动控制数据;
59、所述步骤s33中,还包括具体以下步骤:
60、步骤s331:当实时校徽移动系数大于等于第一校徽移动系数阈值且小于等于第二校徽移动系数阈值,则控制智能校徽对目标控制对象进行正常控制;
61、步骤s332:当实时校徽移动系数小于第一校徽移动系数阈值或大于第二校徽移动系数阈值,则控制智能校徽开启震动模式来对目标控制对象进行专注提醒。
62、进一步地,所述步骤s32中,还包括具体以下步骤:
63、步骤s321:获取目标控制对象处于专注状态下的时间段,在此时间段内选取多个基准样本时间段,且每个基准样本时间段的时间长度均为特征控制时长;
64、步骤s322:分别对每一个基准样本时间段对应的校徽移动系数进行获取,得到多个样本校徽移动系数;
65、步骤s323:将多个样本校徽移动系数进行平均数计算,得到样本校徽移动平均系数;
66、步骤s324:将多个样本校徽移动系数进行方差计算,得到样本校徽移动系数方差;
67、步骤s325:将样本校徽移动平均系数和样本校徽移动系数方差通过计算,得到第一校徽移动系数阈值;
68、对第一校徽移动系数阈值进行计算,具体如下:
69、;
70、其中,hxx1为第一校徽移动系数阈值,yxp为样本校徽移动平均系数,yfc为样本校徽移动系数方差;
71、步骤s326:将样本校徽移动平均系数和样本校徽移动系数方差通过计算,得到第二校徽移动系数阈值;
72、对第二校徽移动系数阈值进行计算,具体如下:
73、;
74、其中,hxx2为第二校徽移动系数阈值,yxp为样本校徽移动平均系数,yfc为样本校徽移动系数方差。
75、进一步地,所述步骤s4中,还包括具体以下步骤:
76、步骤s41:获取校徽位置移动数据,根据校徽位置移动数据分别获取多个位置监测时段对应的校徽移动系数,得到多个校徽移动系数;
77、步骤s42:获取校徽自动控制数据,根据校徽自动控制数据获取第一校徽移动系数阈值、第二校徽移动系数阈值以及多个基准样本时间段;
78、步骤s43:将每一个校徽移动系数分别与第一校徽移动系数阈值和第二校徽移动系数阈值进行数值比对,根据数值比对结果将校徽移动系数对应的位置监测时段划分为第一类型监测时段和第二类型监测时段;
79、所述步骤s43中,还包括具体以下步骤:
80、步骤s431:当校徽移动系数大于等于第一校徽移动系数阈值且小于等于第二校徽移动系数阈值,则将校徽移动系数对应的位置监测时段标记为第一类型监测时段;
81、步骤s432:当校徽移动系数小于第一校徽移动系数阈值或大于第二校徽移动系数阈值,则将校徽移动系数对应的位置监测时段标记为第二类型监测时段;
82、步骤s44:对校徽控制样本周期内位置监测时段对应的数量值进行统计,得到位置监测时段总数,统计第一类型监测时段对应的数量值,得到常规监测时段数量值,计算常规监测时段数量值与位置监测时段总数的比值,得到常规监测时段数量比;
83、步骤s45:在若干个第二类型监测时段中随机选取多个心率监测时间点,分别获取目标控制对象在每一个心率监测时间点对应的心率数值,得到多个监测心率数值,对所得的多个监测心率数值进行平均数计算,得到第一平均心率数值;
84、步骤s46:对目标控制对象在多个基准样本时间段内的时段平均心率进行获取,得到多个时段平均心率,并对所得的多个时段平均心率进行平均数计算,得到第二平均心率数值;
85、步骤s47:根据第一平均心率数值、第二平均心率数值以及常规监测时段数量比对处于校徽控制样本周期的目标控制对象进行状态专注性评估;
86、所述步骤s47中,还包括具体以下步骤:
87、步骤s471:当第一平均心率数值和第二平均心率数值相等时,获取常规监测时段数量比阈值,将常规监测时段数量比与常规监测时段数量比阈值进行数值比对;
88、步骤s472:当常规监测时段数量比大于常规监测时段数量比阈值时,将处于校徽控制样本周期的目标控制对象评估处于专注状态;
89、步骤s473:当常规监测时段数量比小于常规监测时段数量比阈值时,将处于校徽控制样本周期的目标控制对象评估处于非专注状态;
90、步骤s474:当第一平均心率数值和第二平均心率数值不相等时,将常规监测时段数量比、第一平均心率数值以及第二平均心率数值通过计算得到校徽控制样本周期对应的周期状态评估系数;
91、对周期状态评估系数进行计算,具体公式配置如下:
92、;
93、其中,ztp为周期状态评估系数,cgs为常规监测时段数量比,xlp1为第一平均心率数值,xlp2为第二平均心率数值;
94、步骤s475:分别获取常规监测时段数量比阈值和平均心率基准偏差值,计算平均心率基准偏差值与常规监测时段数量比阈值的比值,得到周期状态评估系数阈值;
95、步骤s476:当周期状态评估系数小于周期状态评估系数阈值时,将处于校徽控制样本周期的目标控制对象评估处于专注状态;
96、步骤s477:当周期状态评估系数大于等于周期状态评估系数阈值时,将处于校徽控制样本周期的目标控制对象评估处于非专注状态。
97、一种智能校徽的自动控制系统,各模块具体工作过程如下:
98、坐标系模块:用于获取校徽控制样本周期和校徽位置控制坐标系,得到坐标系数据;
99、位置数据模块:用于通过分析坐标系数据获取多个校徽移动系数和实时校徽移动系数,得到校徽位置移动数据;
100、校徽控制模块:用于分别获取第一校徽移动系数阈值和第二校徽移动系数阈值,并将其实时校徽移动系数进行数值比对,根据数值比对结果智能校徽进行实时控制;
101、结果反馈模块:用于根据校徽自动控制数据和校徽位置移动数据对处于校徽控制样本周期的目标控制对象进行专注性评估。
102、综上所述,由于采用了上述技术方案,本发明的有益效果是:
103、1、本发明通过校徽位置控制坐标系获取实时校徽移动系数来对目标控制对象进行实时专注性监测,能够保证监测过程的准确性;
104、2、本发明分别分析目标控制对象的行为习惯来获取第一校徽移动系数阈值和第二校徽移动系数阈值,并将实时校徽移动系数与第一校徽移动系数阈值和第二校徽移动系数阈值进行数值比对,根据数值比对结果对智能校徽进行实时控制,能够有效保证智能校徽控制过程的针对性。
本文地址:https://www.jishuxx.com/zhuanli/20241204/341275.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表