一种基于相似路径和量子浣熊机制的WSN节点定位方法
- 国知局
- 2024-12-06 12:39:14
本发明属于无线通信,具体涉及一种基于相似路径和量子浣熊机制的wsn节点定位方法。
背景技术:
1、无线传感器网络wsn作为无线通信技术中的一个新兴领域,使一个设备集成计算、通信与传感等功能成为可能,已逐渐走向集成化和规模化,wsn是由大量具备感知、计算和通信能力的微型传感器节点所构成的多跳自组织网络,在环境监测、工业交通和室内监控等领域有着广泛的应用。在无线传感器网络感知到环境变化的同时,获取事件发生的具体位置坐标是至关重要的,如果不知道信息的位置坐标,监测到的信息将毫无意义,因此节点定位技术是wsn中的一项关键性技术,通过少量配置全球定位系统接收器的无线传感器实现监测区域内所有无线传感器的精准定位,是无线传感器网络能以较低成本提供安全可靠的通信与控制业务的基础。
2、无线传感器网络节点定位方法根据是否需要增设硬件测量设备分为测距式定位和非测距式定位,测距式定位方法主要包括以下步骤:首先利用传感器自带的硬件设备测量角度或距离,其次使用节点定位计算方法确定待定位节点坐标,最后通过优化校正获得了最终坐标,测距式定位方法定位精准度很高,但受限于硬件体积、成本和网络能耗,测距式定位方法主要包括信号到达时间定位toa、信号到达时间差定位tdoa和信号到达角度定位aoa等。非测距式定位是根据节点间连通性和路由信息交换等技术估算待定位节点与已知节点间的距离来计算节点的坐标,无要额外的测量硬件设备,可以降低设备的成本和网络能耗,响应快,但定位精度较低,非测距式定位方法主要包括近似三角形内点定位apit、距离矢量跳段定位dv-hop以及质心定位等,dv-hop定位是目前最常用的非测距式定位技术,无需额外的硬件设备即可实现节点精准定位,为无线传感器网络定位方法相关的改进策略研究提供了一种良好的模型设计。
3、通过对现有技术文献的检索发现,李新春等人在《测控技术》(2017,36(01):84-87+91)发表的“基于粒子群优化的dv-hop定位算法研究”中用粒子群算法来计算定位节点坐标,降低了最终计算时产生的误差。李广飞等人在《云南大学学报》(2019,41(s1):27-32)上发表的“基于量子退火算法的无线传感器网络节点定位”中通过量子隧穿效应,能够穿透能量势垒由局部最优到达全局最优,有效提高了计算速度。chai等人在“aparallel woawithtwo communication strategies applied in dv-hop localization method”中提出一种基于并行鲸鱼优化算法的改进型dv-hop定位方法,该方法包含两种组间信息交换策略,大大增强了原鲸鱼优化算法woa的全局搜索能力和种群多样性,能够被很好的用于优化无线传感器网络节点定位。kanwar等人在“dv-hop-based range-free localizationalgorithm for wireless sensor network using runner-root optimization”中提出基于入侵杂草算法的改进型dv-hop定位方法,引入了一个修正系数来修改锚节点的跳数大小,通过计算所有锚节点在目标节点的跳数大小,减少了目标节点和锚节点之间的通信,为了证明该定位方法在各向异性网络中的适用性,还考虑了无线电不规则模型,以克服传统dv-hop的现有缺点,该定位方法能最大限度地降低定位误差和计算时间。根据已有文献的检索结果得知,现有的无线传感器网络非测距式节点定位方法在网络拓扑结构呈各向异性时会存在技术应用层面的限制,使得网络状态很难满足所需要的理想状态,进而导致网络节点定位精度较差和鲁棒性较差的问题,缺少一种简单高效且适应性好的节点定位方法。
技术实现思路
1、本发明的目的在于提供一种基于相似路径和量子浣熊机制的wsn节点定位方法,在距离估计阶段,目标节点通过最大相似路径度确定其相似锚节点,同步或异步利用邻居锚节点和相似锚节点的平均跳距信息;在位置计算阶段,利用量子浣熊机制来计算位置,仿生于浣熊狩猎和攻击模式,结合量子旋转角来演化量子浣熊量子态,既扩展了应用局限,又实现了精准定位。
2、本发明的目的通过如下技术方案来实现:
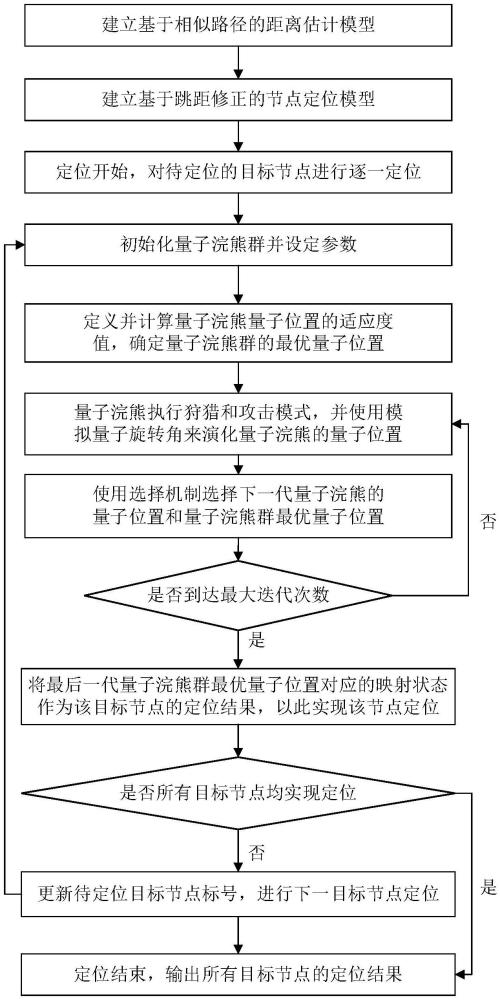
3、一种基于相似路径和量子浣熊机制的wsn节点定位方法,具体步骤如下:
4、步骤一:建立基于相似路径的距离估计模型;
5、步骤二:建立基于跳距修正的节点定位模型,开始定位;
6、步骤三:初始化量子浣熊群并设定相关参数;
7、步骤四:定义并计算每只量子浣熊量子位置的适应度值,并确定量子浣熊群最优量子位置;
8、步骤五:量子浣熊执行狩猎和攻击模式,并在狩猎和攻击模式下使用量子旋转角来演化量子浣熊的量子位置;
9、步骤六:使用选择机制选择下一代量子浣熊的量子位置和量子浣熊群的最优量子位置;
10、步骤七:量子浣熊机制演进终止判断,实现对目标节点的定位;
11、步骤八:定位终止判断,输出所有目标节点的定位结果。
12、进一步地,所述步骤一建立基于相似路径的距离估计模型具体为:
13、在无线传感器网络中,设定节点数量为n,信标比例为η,锚节点数量为目标节点数量为其中,round(·)为就近取整函数,锚节点位置坐标集合表示第i′个锚节点的位置坐标矢量,xi′和yi′分别表示第i′个锚节点位置的横坐标和纵坐标,i′为锚节点标号,锚节点对最小跳数矩阵其中,oi′,j′为第i′个和第j′个锚节点对之间的最小跳数值,ξ为无穷大值,当oi′,j′=0时,表示俩锚节点重合;当oi′,j′=ξ时,表示俩锚节点间不可通信,j′为锚节点标号,第i′个锚节点的自身平均跳距文字描述为其他锚节点到该锚节点间的距离和除以锚节点对最小跳数和,∑为累加符号,σ为累加标号,
14、所有锚节点计算自身平均跳距并将自身平均跳距和跳数信息进行广播,目标节点保留所有通信可达锚节点的平均跳距和跳数信息,通信可达锚节点分为邻居锚节点和相似锚节点两种,邻居锚节点是与目标节点具有最小跳数的锚节点,邻居锚节点将其平均跳距作为目标节点的平均跳距i″为目标节点标号,相似锚节点是与目标节点具有最大路径相似度的锚节点,路径相似度其中,a为目标节点到该锚节点的最短路径集合,b为其他锚节点到该锚节点的最短路径集合,a∩b表示最短路径集合a和b所途径的相同路径集合,表示路径集合中所包含元素个数,则相似度最大的路径为最大相似路径,将此路径的距离除以跳数所得到的值作为此路径的平均跳距,相似锚节点将其作为目标节点的相似跳距
15、目标节点到锚节点的相对估计距离其中,表示目标节点到锚节点间的最小跳数,根据距离矢量路由机制获得;表示目标节点到锚节点的最佳跳距,根据阈值进行如下选择:相似系数μi″,i′为最大路径相似度,阈值当相似系数μi″,i′大于阈值时,最佳跳距为相似跳距,当相似系数μi″,i′小于等于阈值时,最佳跳距为平均跳距。进一步地,所述步骤二具体为:
16、目标节点的定位位置坐标集合表示第i″个目标节点的定位位置坐标矢量,和分别表示第i″个目标节点定位位置的横坐标和纵坐标,节点通信半径为γ,设定第i″个目标节点的定位误差函数第i″个目标节点的标准定位误差函数将待定位的目标节点标号i″初始化为1,对其进行逐一定位。
17、进一步地,所述步骤三具体为:
18、设定量子浣熊群体规模为h,最大迭代次数为g,迭代次数标号为g,g=1,2,…,g,第g次迭代时,第i个量子浣熊在q维搜索空间中的量子位置初代时,g=1,量子浣熊在每一维搜索空间中的量子位置均初始化为[0,1]区间内的均匀随机数。
19、进一步地,所述步骤四具体为:
20、第g次迭代时,将所有量子浣熊量子位置的每一维映射到对应解空间范围内,得到量子位置的映射状态映射方程定义为i=1,2,...,h,j=1,2,…,q,其中,和分别为量子浣熊第j维的上限和下限,为第i个量子浣熊的第j维量子位置,将第i个量子浣熊量子位置的映射状态代入第i″个目标节点的定位误差函数中得到对应的适应度值其中,上标t表示转置;将所有量子浣熊量子位置的适应度值由小到大排列,适应度值最小的量子位置被记为量子浣熊群最优量子位置ρ为群体中适应度最小的量子浣熊标签。
21、进一步地,所述步骤五具体为:
22、定义第i个量子浣熊在狩猎和攻击模式下第j维量子位置的更新方程狩猎模式下定义攻击模式下定义其中,为第i个量子浣熊的第j维模拟量子旋转角,e1为逼迫系数,γ1为[0,1]之间均匀分布的随机数,为量子浣熊群最优的第j维量子位置,e2为攻击系数,γ2为[-1,1]之间均匀分布的随机数,i=1,2,...,h,j=1,2,…,q;第i个量子浣熊执行狩猎和攻击模式后其新产生量子位置
23、进一步地,所述步骤六具体为:
24、计算所有量子浣熊在初代和新产生量子位置的适应度值,应用贪婪策略,从量子位置集合中选择h个适应度值较小的量子位置作为下一代量子浣熊的量子位置i=1,2,…,h;将g+1代量子浣熊量子位置的适应度值由小到大排列,更新量子浣熊群的最优量子位置为
25、进一步地,所述步骤七具体为:
26、若量子浣熊机制演进未达到最大迭代次数g,则令g=g+1,返回步骤五继续演化量子浣熊的量子位置;若达到最大迭代次数g,则终止演进,将量子浣熊群最优量子位置的映射状态作为第i′个目标节点的定位位置坐标矢量,以此实现对该目标节点的定位。
27、进一步地,所述步骤八具体为:
28、判断所有目标节点是否均实现定位,即判断是否满足若不满足,则令i″=i″+1,返回步骤三继续下一目标节点的定位;若满足,则所有目标节点均实现定位,输出定位结果,定位结束。
29、本发明的有益效果在于:
30、与现有技术相比,本发明所提出的基于相似路径和量子浣熊机制的wsn节点定位方法突破了传统定位方法在网络拓扑结构呈各向异性时存在的应用局限,提高了在各向异性网络中的适用性,可应用于实际静态无线传感器网络。为了提高对网络变动的处理能力,目标节点采用跳距修正策略,利用邻居锚节点和相似锚节点的平均跳距信息来估计距离,使得待定位目标节点到锚节点的估计距离更准确;为提高位置计算的精准性,设计并使用量子浣熊机制,具有寻优能力强的特点。仿真实验表明,当网络在节点数量、监测区域、通信半径和信标比例等方面发生变动时,该节点定位方法均展示了较好的鲁棒性和定位精度。
本文地址:https://www.jishuxx.com/zhuanli/20241204/342429.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。