基于视频监控的智慧园区车辆定位与跟踪系统及方法与流程
- 国知局
- 2024-12-06 12:49:49
本发明涉及车辆跟踪定位领域,尤其涉及基于视频监控的智慧园区车辆定位与跟踪系统及方法。
背景技术:
1、现有的智慧园区通过整合物联网、大数据、云计算和人工智能等先进技术,实现园区的智能化管理和服务,提高园区的安全性、便捷性和效率;其中,车辆定位与跟踪系统是智慧园区中不可或缺的一部分,它负责监测园区内车辆的实时位置,为园区管理提供数据支持,同时也为车辆提供导航服务,提升交通流畅性和安全性。
2、如授权公告号为cn117635663b的中国专利公开了一种目标车辆视频跟踪方法及电子设备,通过获取目标车辆的实时位置,转换为道路模型的系统坐标,之后计算目标车辆与各摄像机之间的实时距离,将实时距离小于预设距离的目标摄像机的拍摄视频在显示界面中显示。
3、如公开号为cn113516688a的中国专利申请公开了一种用于车辆的多维智能定位跟踪系统,包括安装在车辆上用于拍摄车辆行驶过程中路面图像、场景图像的视频采集模块,多维智能定位跟踪系统根据相邻帧场景图像得到第一特征点,结合采集设备工作状态计算第一特征点的空间位置,利用第一特征点的空间位置计算后一帧场景图像与下一帧场景图像之间的第二特征点的空间位置,根据第二特征点的空间位置得到第一车辆位置信息,根据路面图像、场景图像得到第二车辆位置信息,并结合第一车辆位置信息与第二车辆位置信息综合判定车辆位置。
4、以上现有技术存在以下问题:由于园区的区域局限性,现有技术很难针对园区内每一种类型车辆的路径做出精确的规划与分配引导,使得园区出现拥堵或分配的路径无法通行等情况,为了解决上述问题,本发明提供了基于视频监控的智慧园区车辆定位与跟踪系统及方法。
技术实现思路
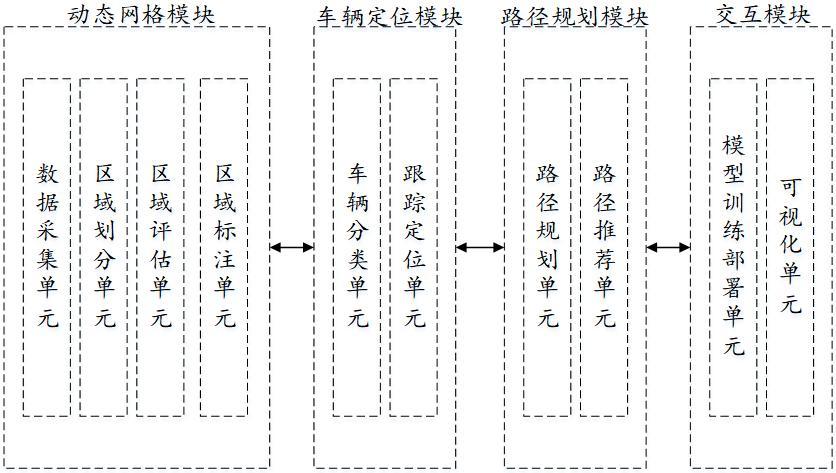
1、针对现有技术的不足,本发明提出了基于视频监控的智慧园区车辆定位与跟踪系统及方法,该系统集成动态网格划分、车辆精准定位、智能路径规划及用户交互功能。通过动态网格模块实现园区区域的智能划分与畅通度评估,车辆定位模块利用深度学习算法实现车辆的高效识别与跟踪,路径规划模块则依据实时路况构建动态路径库,为车辆推荐最优行驶路径。交互模块不仅支持模型快速训练与部署,还实现了处理结果的可视化展示,极大提升了园区车辆管理的智能化水平;本发明有效解决了智慧园区车辆管理中的定位不精、路径规划不合理的问题,提升了园区交通效率与管理效能。
2、为实现上述目的,本发明提供如下技术方案:
3、基于视频监控的智慧园区车辆定位与跟踪系统,包括:动态网格模块、车辆定位模块和路径规划模块;
4、所述动态网格模块包括数据采集单元、区域划分单元、区域评估单元和区域标注单元;所述数据采集单元用于采集工作园区区域地图和园区真实属性数据,并进行预处理保存;所述区域划分单元,用于根据获取的园区区域地图和园区真实属性数据,通过网格算法进行区域划分;所述区域评估单元,用于根据园区真实属性数据中不同时间点内车流量数据,通过评估算法对划分的对应区域进行畅通度评估,获取对应区域不同时间点的畅通度;所述区域标注单元,用于根据获取的对应区域不同时间点的畅通度对划分的区域内的行驶路径进行动态分类和标注,并将标注后的路径更新到路径规划单元构建的路径库中;
5、所述车辆定位模块包括车辆分类单元和跟踪定位单元;所述车辆分类单元,用于根据划分区域内的监控实时拍摄的车辆视频数据,通过内置的多维检测匹配模型,对车辆进行检测分类;所述跟踪定位单元,用于对分类后的车辆,通过内置的多目标跟踪定位算法,进行实时跟踪定位;
6、所述路径规划模块包括路径规划单元和路径推荐单元;所述路径规划单元,用于构建路径库,并利用路径库内置的路径优化模型根据园区真实属性数据、对应区域不同时间点的畅通度和检测的车辆类型对构建的路径进行二次规划调整;所述路径推荐单元,用于根据车辆当前位置,车辆检测分类结果、目标点位置和当前时刻园区真实属性数据,通过构建的路径库向当前跟踪定位的车辆推荐最优路径。
7、具体地,园区真实属性数据包括:园区内路径分布数据,建筑与不可通行区域数据、车流量视频数据,视频监控分布数据、单个视频监控覆盖范围和目标点位置;所述区域评估单元获取对应区域不同时间点的畅通度的具体步骤包括:
8、b1、获取园区三个月历史工作时间内第n个划分区域内第i个通行路径的道路容量、第j种类型车辆历史车流量、第j种类型车辆在第i个通行路径平均通行时间和路径长度、第j种类型车辆在第i个通行路径上畅通行驶时的平均速度,并对获取的数据进行预处理;
9、b2、对b1中获取的预处理的数据以10分钟为窗口长度进行划分,获取划分完成的道路行驶状态数据;
10、b3、利用划分后的道路行驶状态数据,计算得到每一个划分后时间窗口内的当前密度与阻塞密度对应的流量密度比和当前速度与畅行速度对应的行驶速度比,具体为:,,其中,表示在第n个划分区域内第i个通行路径上行驶的第j种车辆的行驶速度比,表示在第n个划分区域内第i个通行路径上行驶的第j种车辆的流量密度比,表示第n个划分区域内第i个通行路径上阻塞密度,表示第j种车辆的车身宽度,表示第n个划分区域内第i个通行路径的平均宽度。
11、具体的,区域评估单元获取对应区域不同时间点的畅通度的具体步骤还包括:
12、b4、基于计算出的行驶速度比和流量密度比计算得到第j种车辆行驶在第n个划分区域内第i个通行路径上的畅通系数,并将计算得到的畅通系数与b1中收集的行驶状态数据在时间维度上进行对齐,获取畅通系数预测训练集;
13、b5、基于支持向量机构建畅通预测模型,并将获取的畅通系数预测训练集输入到畅通预测模型进行训练,获取训练完成的畅通预测模型,并将获取的畅通预测模型内置到区域评估单元内;
14、b6、通过视频监控实时获取园区内真实属性数据和车辆检测分类结果数据,并将获取的数据输入到区域评估单元内,计算第j种车辆类型在第n个划分区域内的第i个通行路径未来5分钟之内的畅通系数均值,并将该均值作为当前时刻第j种车辆在第i个行驶路径的畅通系数;
15、b7、根据计算出的第j种车辆在第n个划分区域内的第i个通行路径当前时刻畅通系数,第i个通行路径的长度,计算得到第j种类型车辆在第n个区域第i个通行路径实时通行时间,并将计算的畅通系数和实时通行时间反馈到区域标注单元对路径规划单元构建的路径库内的对应区域行驶路径进行动态更新标注,具体地,。
16、具体地,路径推荐单元推荐最优路径的具体步骤包括:
17、c1、设置畅通系数阈值和,将获取的第j种车辆在第n个划分区域内的第i个通行路径当前时刻畅通系数与和进行比较,当时,则第j种车辆从第n个划分区域内第i个通行路径上行驶通过;
18、c2、当时,则将计算得到和对应通行路径的通行时间与所述路径库中剩余划分区域内通行路径对应的当前时刻畅通系数与通行时间进行比较;
19、c21、当比较结果全部满足且时,则第j种车辆行驶仍从第n个划分区域内第i个通行路径上行驶通过,直到到达目标点,其中,表示第j种车辆行驶在第u个划分区域内第v个通行路径上的当前时刻畅通系数,表示第j种类型车辆在第u个区域第v个通行路径上的实时通行时间;
20、c22、当至少有一个划分区域的通行路径满足时,则将与满足条件通行路径对应的通行时间进行比较,当只有一个通行路径满足时,则选择对应通行路径作为当前时刻区域行驶路径,重复c22过程直到到达目标点;
21、c23、当至少有两个通行路径满足时,则将满足的通行路径按照通行时间降序的形式进行排序,并选择降序排列后通行时间最小对应的通行路径作为当前时刻区域行驶路径,重复c23过程直到到达目标点;
22、c24、当所有通行路径都满足时,则第j种车辆仍从第n个划分区域内第i个通行路径上行驶通过,直到到达目标点。
23、具体地,路径推荐单元推荐最优路径的具体步骤还包括:
24、c3、当时,则调用路径规划单元根据当前车辆类型、车辆位置、目标点位置和园区真实属性数据,通过路径优化模型对所述路径库中路径进行优化,并获取优化后对应区域内行驶路径对应的5分钟之内的畅通系数均值和实时通行时间;
25、c4、根据优化后的路径库重复c1和c2过程向监控识别得到的第j种类型车辆推荐对应的区域行驶路径,直到到达目标点位置。
26、具体地,路径优化模型构建的具体步骤包括:
27、d1、根据获取的园区真实属性数据、划分的园区区域和车辆分类单元获取的对应划分区域的车辆类型与每一类型车辆的数量,构建路径优化函数,使得每一类型车辆通过所有划分区域的总时间最短,具体的目标函数为:
28、,
29、其中,表示第j类型的车辆在第n个划分区域内使用第i条通行路径的决策变量,表示第j类型车辆在第n个划分区域内的第i条通行路径的占用容量,表示园区划分区域的总个数,表示所有划分区域内行驶路径的总个数,表示监控检测到的每个划分区域内车辆类型的总个数;
30、d2、基于bp神经网络优化粒子群算法构建路径优化模型,将构建的路径优化函数内置到路径优化模型内的粒子群算法中,作为粒子群算法的适应度函数;
31、d3、将视频监控实时获取的园区真实属性数据和现有路径库中动态标注后的路径数据输入到路径优化模型,获取优化后的路径库,并将优化后的路径库反馈给路径推荐单元,使得每一种类型车辆到达目标点时间最短。
32、具体地,车辆分类单元通过多维检测匹配模型进行车辆检测的具体步骤包括:
33、e1、对获取的园区真实属性数据中的车流量视频数据进行分帧处理,获取p种车辆图像数据,并对分帧后的车辆图像数据进行对应车牌号、车辆颜色和车辆属性信息数据标注;
34、e2、基于预训练轻量模型构建多维检测匹配模型,将获取的车流量视频数据输入到多维检测匹配模型内的轻量vit预训练子模型中,对车辆运行状态和车间距离进行提取,获取车辆运行状态特征和车间距离;
35、e3、设置车间距离阈值,将标注后的p种车辆图像数据同时输入到resnet-18预训练子模型中,对p种类型车辆中每一种车辆对应的静态表征进行提取,获取p种类型车辆对应的静态特征集;
36、e4、将获取的车间距离与车间距离阈值进行比较,当和对应类型车辆的车间距离大于车间距离阈值时,和表示可区别车辆静态特征,当和对应类型车辆的车间距离小于等于车间距离阈值时,和表示不可区别车辆静态特征;
37、e5、设置车辆相似度阈值,将获取的不可区别车辆静态特征和输入到相似性子模型中计算得到车辆静态特征两两特征之间的相似度,并将计算得到的相似度与车辆相似度阈值进行比较,当小于时表示和为不相似车辆静态特征,并将不相似车辆静态特征与可区别车辆静态特征级联,获取二次可区别车辆静态特征;
38、e6、当大于等于时表示和为相似车辆静态特征,将获取的相似车辆静态特征级联,获取二次不可区别车辆静态特征集。
39、具体地,车辆分类单元通过多维检测匹配模型进行车辆检测的具体步骤还包括:
40、e7、将车辆属性信息数据输入到中文预训练的bert子模型中,获取对应车辆文本表征特征;
41、e8、将获取的文本表征特征、二次不可区别车辆静态特征集和车辆运行状态特征输入到交叉注意力网络构建的融合注意力子模型,获取对应车辆融合区别特征;
42、e9、设置交叉熵损失函数和训练周期,将获取的车辆融合区别特征和二次可区别车辆静态特征输入到softmax函数构建的输出子模型中进行训练,获取训练完成的多维检测匹配模型,并输出对应车辆的类型、车辆宽度、车辆属性信息和对应划分区域每一种类型车辆的数量;
43、e10、将训练完成的多维检测匹配模型内置到路径优化模型,通过视频监控实时拍摄划分后每个区域内的车流量视频数据,并利用车辆分类单元对获取车流量视频中车辆类型进行识别检测,并将检测到车辆类型和车辆属性信息反馈到跟踪定位单元和路径推荐单元,进行定位跟踪和路径推荐。
44、基于视频监控的智慧园区车辆定位与跟踪方法,步骤包括:
45、s1、获取园区区域地图和园区真实属性数据并进行预处理,并利用网格算法根据保存的数据进行区域划分,同时对划分后的区域通过评估算法,获取划分后每一个区域不同时间的畅通度;
46、s2、根据获取的每一个区域不同时间的畅通度对每一个划分的区域进行动态分类与标注;
47、s3、根据对应划分区域获取的视频数据,通过内置的多维检测匹配模型对车辆进行检测分类,并通过多目标跟踪定位算法,对分类后的每一种类型车辆进行实时跟踪定位;
48、s4、构建带有路径优化模型的路径库,并根据对应跟踪车辆当前位置,目标点位置和当前时刻园区真实属性数据,通过推荐算法和路径库向对应跟踪车辆推荐已有或优化调整后的行进路径。
49、一种计算机可读存储介质,其上存储有计算机指令,当计算机指令运行时执行基于视频监控的智慧园区车辆定位与跟踪方法。
50、与现有技术相比,本发明的有益效果是:
51、1.本发明针对现有技术的不足,通过深度学习历史数据和实时监控信息,动态网格模块实现了对园区地图的智能划分与畅通度评估,确保了路径规划的精准性和时效性。车辆定位模块则借助先进的多维检测匹配模型和多目标跟踪定位算法,准确无误地识别和追踪每一辆车辆,为路径规划提供了关键的实时位置信息,此外,本发明还利用了路径优化模型对路径进行动态调整,以适应不断变化的交通状况,这一机制能够根据车辆类型、当前位置、目标点位置以及实时路况,通过实时计算得到的每一个划分区域行驶路径的畅通度和车辆类型数据,智能推荐最优路径,有效避免了拥堵,确保了路径的可行性,避免了推荐路径的不可行;
52、2.本发明通过深度分析历史数据,结合实时监控信息,利用支持向量机(svm)和bp神经网络优化粒子群算法,构建了动态的畅通预测和路径优化模型,这不仅能够实时评估园区各区域的交通状况,还能针对不同类型的车辆,提供个性化且高效的路径规划,有效避免了拥堵和路径分配无效的问题,此外本发明还通过多维检测匹配模型能够准确识别车辆类型、尺寸和车辆属性信息,进一步提高车辆识别和定位的精度,使得每一种类型车辆分配的路径更符合其对应的行驶状态,更快地到达对应的目标点。
本文地址:https://www.jishuxx.com/zhuanli/20241204/342820.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表