一种大跨度不规则刚性体智能化分段生成方法与流程
- 国知局
- 2024-12-06 13:11:06
本发明涉及空间建模,特别是涉及一种大跨度不规则刚性体智能化分段生成方法。
背景技术:
1、信息模型(information modeling)是以三维空间点位数据等各项相关信息作为模型的基础,进行可视化空间模型的建立,通过数字信息仿真模拟实体所具有的真实信息。受到设计信息、创建环境及创建方法等方面的限制,缺乏对大跨度不规则刚性体进行智能分段和快速自动化建模的既有方法。
2、当前对于大跨度不规则刚性体智能化分段生成快速创建模型主要存在以下问题:
3、(1)对大跨度不规则刚性体进行空间建模的传统的方法都是依靠人为手工测量刚性体坐标,算好分段处点位,最后再进行分段。这种传统方法虽然能够将简单形状的不规则刚性体进行分段,但在精度、成本和效率各方面都存在一定的局限性,任务繁杂,工作量大。
4、(2)尤其是在面对跨度大、尺寸大的不规则刚性体,且其分段要求随机,或必须根据现场建造条件时时变化时,其进行分段生成的难度则会显著增加,且无法保证精确度。
技术实现思路
1、本发明的目的是提供一种大跨度不规则刚性体智能化分段生成方法,可用于建筑施工领域,目的是解决现有大跨度刚性结构深化设计精度不足,影响效率、成本的问题,为该类结构提供高效、精确的几何刚性体智能生成方法。
2、为实现上述目的,本发明采用如下技术方案:
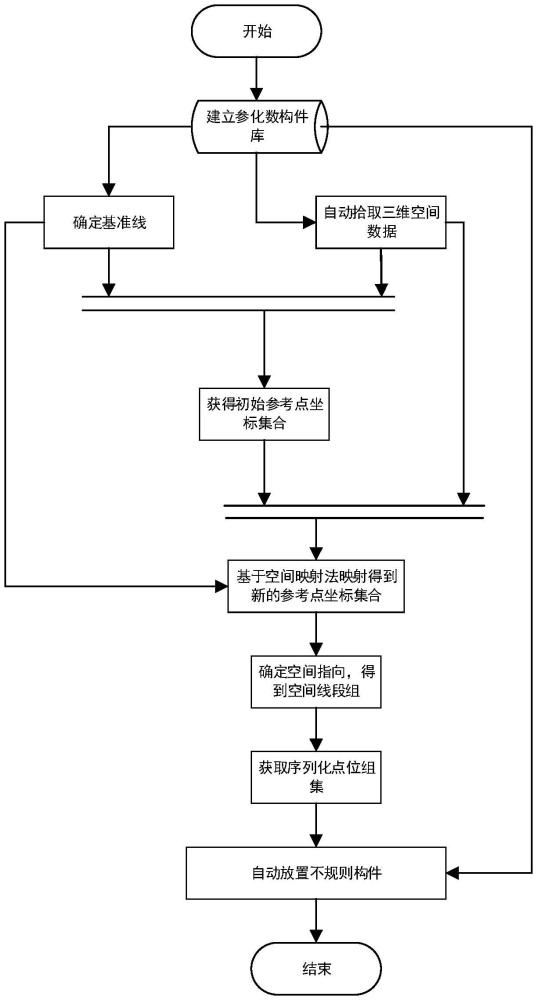
3、步骤一:基于设计信息的参数化构件库搭建;
4、步骤二:依据方法所应用的大跨度构件几何特征自动化拾取所需的三维空间数据;
5、步骤三:根据目标排布刚性体约束自动化建立并拾取基准线;
6、步骤四:依据步骤二中得到的三维空间数据集合及步骤三的基准线创建点集,得到初始参考点坐标集合;
7、步骤五:基于空间映射法映射出新的参考点坐标集合;
8、步骤5.1:在三维空间中,将已知初始参考点沿着具有指定方向和长度的向量进行空间上的映射,映射规则遵循向量加法及数乘原理,生成新的参考点坐标集合;
9、步骤5.2:创建函数名为vector.bycoodinates,返回值类型为vector的方法体,定义起点的originx、originy、originz并将步骤四中获取的高程数据作为targetz输入,方法内部创建对象起始点,通过计算创建联系两个点之间的具有明确方向和大小的三维向量,即对提取的高程数据进行了向量化处理;
10、步骤5.3:定义一个名为translatepoints的静态函数,接收点集和向量作为输入,然后将向量加到点集中的每个点上,执行点集的向量累加操作。从步骤四中的初始参考点集出发,在三维空间中朝具有明确方向和长度的向量进行映射,生成新的并返回一组新的参考点坐标集合。
11、步骤六:通过向量方向的动态定位,确定空间指向,生成新的固定位置空间线段组;
12、步骤6.1:使用curve.planeatsegmentlength方法体,接收空间曲线对象和表示曲线参数的数值即上述基准线和里程数据作为输入,通过曲线参数定位特定的位置,然后在定位点处自动计算并提取法线与曲线切线对齐的平面并输出,即得到基准线上初始点集处的参考平面;
13、步骤6.2:使用plane.normal方法体,从平面对象中提取法线向量并输出;
14、步骤6.3:创建函数名为rotatevectortoalignwithplane的静态方法,接收向量对象和平面对象即上述法线向量和初始点集处的参考平面作为输入,执行向量的空间旋转,以动态定位其指向,使得向量方向与平面的法线方向对齐;
15、步骤6.4:使用函数名为line.bystartpointdirectionlength的方法体,接收起始点startpoint、方向向量directionvector以及线段长度length作为参数,按已确定的向量方向展开直线,得到一组新的固定位置空间线段组。
16、步骤七:根据已得空间线段组参数求解序列化点位组集;
17、步骤7.1:使用curve.offset方法体,定义偏移距离参数并将步骤六中空间线段组作为曲线对象输入,完成曲线在拓扑上的复制并将曲线以嵌套列表形式输出;
18、步骤7.2:使用函数calculatespatialreferencepoints,提取曲线起始点空间信息。定义表示曲线参数的数值和上述曲线对象作为输入,方法内部将曲线参数化表示,通过给定数据逆向求解曲线参数,从而确定曲线上的特定位置,生成点集,得到一组新的点坐标集合;
19、步骤7.3:使用list.transpose、list.getltematindex等数组处理方法体,进行列表矩阵的布局重构、行列互换等,得到对应的序列化点位组集坐标列表,该组集具有在几何上的连续性,形成无缝的几何路径。
20、步骤八:通过序列化点位组集,自动创建不规则构件;
21、步骤九:完成大跨度不规则刚性体结构的自动分段生成。
22、与现有技术相比,本发明具有以下特点和有益效果:
23、1.本发明是在主流建模软件上操作,通过计算机编程,智能提取构件几何特征数据通过计算分析并返回结果,可以快速实现大跨度不规则刚性体智能化分段生成,优化了不规则刚性体规划的工作流程,有效提高了构件的排布效率和精度。
24、2.本发明设计了一种基于空间映射法映射得到坐标集合,并结合参考曲线方向计算变换得到所需动态指向,最后生成自适应序列化点集的方法。
25、3.本发明提升了构件智能化规划水平,可依据应用目标通过自动化拾取输入参数、编辑程序等以满足实际需要。
技术特征:1.一种大跨度不规则刚性体智能化分段生成方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种大跨度不规则刚性体智能化分段生成方法,其特征在于,步骤五包括:
3.根据权利要求2所述的一种大跨度不规则刚性体智能化分段生成方法,其特征在于,步骤六包括:
4.根据权利要求3所述的一种大跨度不规则刚性体智能化分段生成方法,其特征在于,步骤七包括:
技术总结本发明公开了一种大跨度不规则刚性体智能化分段生成方法,包括:基于设计信息的参数化构件库搭建;依据方法所应用的大跨度构件几何特征自动化拾取所需的三维空间数据;根据目标排布刚性体约束自动化建立并拾取基准线;依据得到的三维空间数据集合及建立的基准线创建点集,得到初始参考点坐标集合;基于空间映射法映射出新的参考点坐标集合;通过向量方向的动态定位,确定空间指向,生成新的固定位置空间线段组;基于已得空间线段组参数求解序列化点位组集;通过序列化点位组集,自动创建不规则构件;最后完成大跨度不规则刚性体结构的自动分段生成。本发明实现了在给定相关设计信息下自动对大跨度不规则刚性体进行智能化分段生成的工作。技术研发人员:黄建平,魏然,魏文斌,施钱根受保护的技术使用者:江西赣江中医药科创城建设投资集团有限公司技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/343397.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。