一种套袋机械手及套袋机的制作方法
- 国知局
- 2024-12-26 16:02:41
本发明属于食用菌生产设备领域,尤其涉及一种套袋机械手及套袋机。
背景技术:
1、食用菌大范围生产时多采用菌包培育的方式进行,菌包作为食用菌的培植场所,菌包成分大多包含木屑、麸皮、食用石膏粉等主要成分,上述物料通过一定的配比,经过搅拌后,进行灭菌、湿化处理后,即可进行灌装处理,采用聚乙烯塑料袋的方式进行灌装,灌装后的菌包捆扎后,进行打孔处理,在菌包周围均匀打上孔洞,在实际培育时,将食用菌菌种注射至菌包内,而后进行培育,控制合适的温度、湿度,短时间内菌包内就会产生菌丝,并且从孔洞中生长出成品菌菇。
2、为避免菌包内长出杂菌,一般的菌包使用周期大概在一个月左右,因此一般的菌菇培育需要及时储备较多的菌包,以备培育的需求,现有技术中制备菌包时,通过搅拌机构将灭菌后的原料导入灌装机内,而后通过人工的方式进行灌装,灌装后的菌包通过人工方式进行捆扎,而后进行后续的生产,因此现有技术中的生产效率并不高效,无法满足大范围的菌菇生产需求。
技术实现思路
1、本发明的目的是提供一种套袋机械手及套袋机,以解决菌包通过人工进行灌装,生产效率低的问题。本发明所采用的技术方案如下:
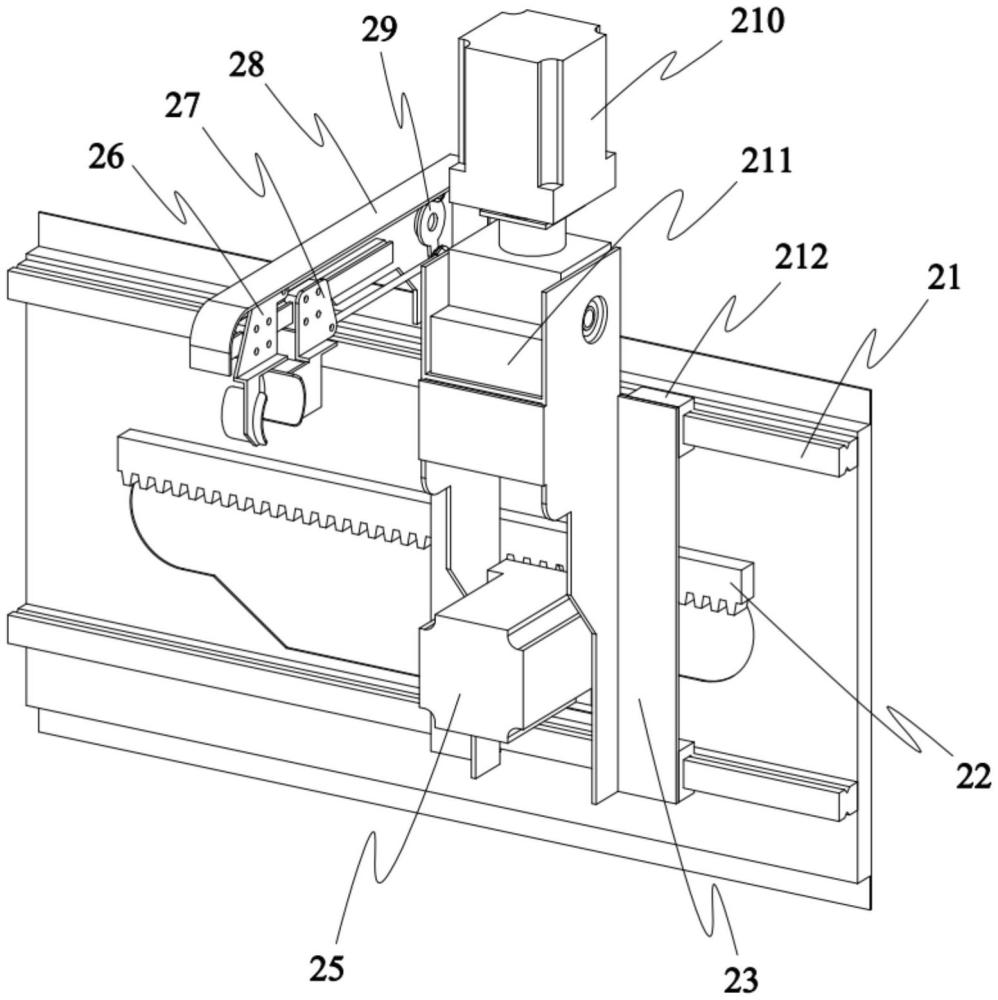
2、一种套袋机械手,包括手臂支座和机械臂,横移驱动装置驱动手臂支座水平往复移动,机械臂的一端转动连接在手臂支座的一侧,手臂支座上设有减速器,转向电机的输出端与减速器的输入端相连,减速器的输出端驱动机械臂垂直于手臂支座的移动方向俯仰摆动,撑袋导轨沿机械臂的长度方向设置,两个撑袋滑块分别与撑袋导轨滑动配合,第一撑袋爪和第二撑袋爪与两个所述撑袋滑块一一对应相连,机械臂上设有旋转气缸,转动接耳与旋转气缸的输出端相连,转动接耳位于撑袋导轨的延长线上,第一撑袋爪和第二撑袋爪分别通过鱼眼轴承拉杆与转动接耳的周向两侧对应铰接,旋转气缸的输出端动作时,第一撑袋爪和第二撑袋爪靠近或远离,机械臂上设有光纤传感器,拖链沿驱动手臂支座的移动方向设置,转向电机的导线和旋转气缸的供气管穿设在所述拖链内。
3、进一步的,所述横移驱动装置包括横移电机和横移导轨组,手臂支座上设有横移滑块组,横移滑块组与水平设置的横移导轨组滑动配合,横移电机固定在手臂支座上,横移电机的输出轴上设有横移齿轮,横移齿轮与横移齿条啮合,横移齿条与横移导轨组相平行,横移电机的导线穿设在所述拖链内。
4、进一步的,第一撑袋爪上设有第一弧形片,第二撑袋爪上设有第二弧形片,第一弧形片和第二弧形片的外弧面撑开菌包袋时,第一弧形片和第二弧形片的内弧面之间面积大于原料灌装机的出料口的直径面积。
5、本发明还提出了一种套袋机,包括机架、套袋机械手、供袋装置和取袋装置,取袋装置固定在机架上,供袋装置与取袋装置相连,所述套袋机械手为上述的套袋机械手,横移导轨组和横移齿条固定在机架上,手臂支座沿靠近或远离取袋装置的方向滑动,机架上设有真空泵,机架的底部设有若干可调地脚;
6、取袋装置包括取袋架、取袋吸盘和开袋吸盘,取袋架上设有竖向设置的取袋导轨组,吸盘基座上设有取袋滑块组,取袋滑块组与取袋导轨组的上部滑动配合,滑台气缸固定在吸盘基座上,滑台气缸的滑块沿靠近或远离套袋机械手的方向滑动,上吸盘架与滑台气缸的滑块相连,取袋吸盘与上吸盘架相连,取袋吸盘为中空构件,取袋吸盘的下侧壁上开设有若干吸气孔,取袋吸盘的内腔通过波纹软管与真空泵相连,吸盘基座与取袋升降装置的输出端相连,取袋架上靠近套袋机械手的一侧设有开袋吸盘,开袋吸盘为中空构件,开袋吸盘的上侧壁上开设有若干吸气孔,开袋吸盘的内腔通过波纹软管与真空泵相连;
7、供袋装置包括供袋架、供袋盒和提升滑动架,供袋架与取袋架相连,供袋盒为上开口的中空构件,供袋盒设置在供袋架上,供袋盒的下侧壁和供袋架上设有上下贯通的避让口,顶升料袋件的竖向轮廓与所述避让口相适配,顶升料袋件与提升滑动架相连,提升滑动架上设有供袋滑块组,供袋滑块组与取袋导轨组的下部滑动配合,电动推杆固定在取袋架上,电动推杆的活塞杆向上与顶升料袋件相连,滑台气缸的滑块缩回时,供袋盒的上开口与取袋吸盘竖向对齐,若干菌包袋层叠放置在顶升料袋件上,菌包袋的袋口朝向套袋机械手摆放,取袋吸盘吸起菌包袋,滑台气缸的滑块伸出时,吸起的菌包袋袋口处于开袋吸盘的上方。
8、进一步的,供袋盒内设有袋长调节挡板,两个调节螺杆的一端分别与袋长调节挡板的一侧端面相连,两个调节螺杆分别贯穿供袋盒远离套袋机械手的一侧侧壁,并通过螺母固定。
9、进一步的,开袋吸盘与下吸盘架的一端相连,所述下吸盘架的另一端探入取袋架内,并与升降滑块相连,所述升降滑块与取袋导轨组中临近的一根导轨滑动配合,取袋架上设有升降气缸,升降气缸的活塞杆竖向设置,并与所述下吸盘架相连。
10、进一步的,所述下吸盘架包括横条连接板和竖条连接板,横条连接板上设有横向开设的长圆孔,竖条连接板上设有竖向开设的长圆孔,横条连接板上的长圆孔和竖条连接板上的长圆孔通过螺栓配合。
11、进一步的,所述取袋升降装置包括升降电机,升降电机固定在取袋架的顶部,主动带轮套接在升降电机的输出轴上,从动带轮转动设置在取袋架的中部,主动带轮和从动带轮通过同步带相连,吸盘基座通过卡头与所述同步带上一处相连。
12、进一步的,取袋架上设有光电开关,当菌包袋的高度低于光电开关时,电动推杆向上推动顶升料袋件,当菌包袋达到供袋高度时,菌包袋触发光电开关,光电开关控制电动推杆停止伸出。
13、与现有技术相比,本发明的有益效果在于:
14、本发明套袋机通过供袋装置实现菌包袋的自动供袋,取袋装置能够实现取袋,并通过负压吸力将菌包袋的袋口打开,套袋机械手可将打开袋口的菌包袋取走,并套在原料灌装机的出料口上,即可实现菌包的自动供袋、套袋,自动化程度高,极大地提高了生产效率。
技术特征:1.一种套袋机械手,其特征在于:包括手臂支座(23)和机械臂(28),横移驱动装置驱动手臂支座(23)水平往复移动,机械臂(28)的一端转动连接在手臂支座(23)的一侧,手臂支座(23)上设有减速器(211),转向电机(210)的输出端与减速器(211)的输入端相连,减速器(211)的输出端驱动机械臂(28)垂直于手臂支座(23)的移动方向俯仰摆动,撑袋导轨(214)沿机械臂(28)的长度方向设置,两个撑袋滑块分别与撑袋导轨(214)滑动配合,第一撑袋爪(26)和第二撑袋爪(27)与两个所述撑袋滑块一一对应相连,机械臂(28)上设有旋转气缸(215),转动接耳(29)与旋转气缸(215)的输出端相连,转动接耳(29)位于撑袋导轨(214)的延长线上,第一撑袋爪(26)和第二撑袋爪(27)分别通过鱼眼轴承拉杆(213)与转动接耳(29)的周向两侧对应铰接,旋转气缸(215)的输出端动作时,第一撑袋爪(26)和第二撑袋爪(27)靠近或远离,机械臂(28)上设有光纤传感器,拖链沿驱动手臂支座(23)的移动方向设置,转向电机(210)的导线和旋转气缸(215)的供气管穿设在所述拖链内。
2.根据权利要求1所述的一种套袋机械手,其特征在于:所述横移驱动装置包括横移电机(25)和横移导轨组(21),手臂支座(23)上设有横移滑块组(212),横移滑块组(212)与水平设置的横移导轨组(21)滑动配合,横移电机(25)固定在手臂支座(23)上,横移电机(25)的输出轴上设有横移齿轮(24),横移齿轮(24)与横移齿条(22)啮合,横移齿条(22)与横移导轨组(21)相平行,横移电机(25)的导线穿设在所述拖链内。
3.根据权利要求1或2所述的一种套袋机械手,其特征在于:第一撑袋爪(26)上设有第一弧形片(216),第二撑袋爪(27)上设有第二弧形片(217),第一弧形片(216)和第二弧形片(217)的外弧面撑开菌包袋时,第一弧形片(216)和第二弧形片(217)的内弧面之间面积大于原料灌装机的出料口的直径面积。
4.一种套袋机,其特征在于:包括机架(1)、套袋机械手(2)、供袋装置(4)和取袋装置(3),取袋装置(3)固定在机架(1)上,供袋装置(4)与取袋装置(3)相连,所述套袋机械手(2)为权利要求1-3任一项所述的套袋机械手,横移导轨组(21)和横移齿条(22)固定在机架(1)上,手臂支座(23)沿靠近或远离取袋装置(3)的方向滑动,机架(1)上设有真空泵(12),机架(1)的底部设有若干可调地脚(11);
5.根据权利要求4所述的一种套袋机械手及套袋机,其特征在于:供袋盒(41)内设有袋长调节挡板(47),两个调节螺杆(48)的一端分别与袋长调节挡板(47)的一侧端面相连,两个调节螺杆(48)分别贯穿供袋盒(41)远离套袋机械手(2)的一侧侧壁,并通过螺母固定。
6.根据权利要求4所述的一种套袋机械手及套袋机,其特征在于:开袋吸盘(311)与下吸盘架的一端相连,所述下吸盘架的另一端探入取袋架(31)内,并与升降滑块相连,所述升降滑块与取袋导轨组(37)中临近的一根导轨滑动配合,取袋架(31)上设有升降气缸(314),升降气缸(314)的活塞杆竖向设置,并与所述下吸盘架相连。
7.根据权利要求6所述的一种套袋机械手及套袋机,其特征在于:所述下吸盘架包括横条连接板(313)和竖条连接板(312),横条连接板(313)上设有横向开设的长圆孔,竖条连接板(312)上设有竖向开设的长圆孔,横条连接板(313)上的长圆孔和竖条连接板(312)上的长圆孔通过螺栓配合。
8.根据权利要求4所述的一种套袋机械手及套袋机,其特征在于:所述取袋升降装置包括升降电机(38),升降电机(38)固定在取袋架(31)的顶部,主动带轮(39)套接在升降电机(38)的输出轴上,从动带轮(32)转动设置在取袋架(31)的中部,主动带轮(39)和从动带轮(32)通过同步带相连,吸盘基座(35)通过卡头与所述同步带上一处相连。
9.根据权利要求4-8任一项所述的一种套袋机械手及套袋机,其特征在于:取袋架(31)上设有光电开关,当菌包袋的高度低于光电开关时,电动推杆(44)向上推动顶升料袋件(42),当菌包袋达到供袋高度时,菌包袋触发光电开关,光电开关控制电动推杆(44)停止伸出。
技术总结一种套袋机械手及套袋机,属于食用菌生产设备领域,本发明为了解决菌包通过人工进行灌装生产效率低的问题。套袋机械手包括手臂支座,横移驱动装置驱动手臂支座水平往复移动,机械臂的一端转动连接在手臂支座的一侧,手臂支座上设有减速器,转向电机通过减速器驱动机械臂俯仰摆动,撑袋导轨沿机械臂的长向设置,第一撑袋爪和第二撑袋爪分别通过滑块滑动在撑袋导轨上,机械臂上设有旋转气缸,转动接耳与旋转气缸的输出端相连,第一撑袋爪和第二撑袋爪分别通过鱼眼轴承拉杆与转动接耳的周向两侧铰接,旋转气缸的输出端动作时,第一撑袋爪和第二撑袋爪靠近或远离。本发明可实现菌包的自动供袋、套袋,自动化程度高,极大地提高了生产效率。技术研发人员:赵广东受保护的技术使用者:黑龙江省鑫巧手科技开发有限公司技术研发日:技术公布日:2024/12/12本文地址:https://www.jishuxx.com/zhuanli/20241216/347910.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表